MCIMX8M-EVKのスタート・ガイド
このドキュメントの内容
-
パッケージの内容
-
Linux
-
組込みAndroid
-
MCUXpresso SDK
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
お客様の i.MX 8M評価キット
1. パッケージの内容
次の手順では、i.MX 8M評価キットにロード済みのAndroidイメージをブートする方法について説明します。
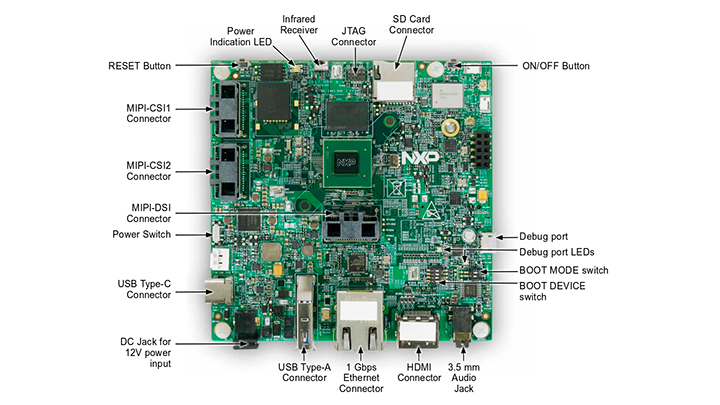
開発キットの内容:
- スマート・デバイス向けi.MX8MQuad EVKボード
- USBケーブル (micro B-標準A)
- ケーブル - アセンブリ、USB 3.0 Type-Aオス、USB micro-Bオス、シールド、1 m
- ケーブル - アセンブリ、USB 2.0 Type-Aオス、USB Type-Cオス、シールド、1 m
- 12 V/5 Aユニバーサル電源
- クイック・スタート・ガイド
- Android BSP(eMMCに書き込み済み)
1.2 eMMCからのブート
i.MX8MQuad EVKでは、ビルド済みのNXP Androidバイナリ・デモ・イメージがeMMCに書き込まれています。内部のバイナリを変更することなく、eMMCからのブートにより、Android上で他のアプリケーションをビルドするための特定の機能を備えたデフォルトのシステムが提供されます。
NXPの組込みLinux®、組込みAndroid™、MCUXpresso SDKの詳細については、以降のセクションを参照してください。
1.3 USBデバッグ・ケーブルの接続
付属のUSBケーブルのmicro-B側をデバッグUARTポートJ901に接続します。ケーブルのもう一方の端をホスト・コンピュータに接続します。
ターミナル・アプリケーションの使用方法がわからない場合は、ホスト・マシンのオペレーティング・システムに応じて、次のいずれかのチュートリアルを試してください。Minicomチュートリアル、Tera Termチュートリアル、PuTTYチュートリアル。
1.4 HDMIケーブルの接続
イメージ・バイナリに付属のユーザー・インターフェースを表示するには、HDMIコネクタ (J1001) を使用してモニタを接続します。
1.5 ブート・スイッチの設定
デフォルトでは、すべてのブート・スイッチはゼロ位置に設定されています。SW801スイッチがeMMCブート・モードにある場合、ボードはeMMCからブートします。
i.MXボードのブート・モードは、ボード上のブート設定用スイッチによって制御されます。
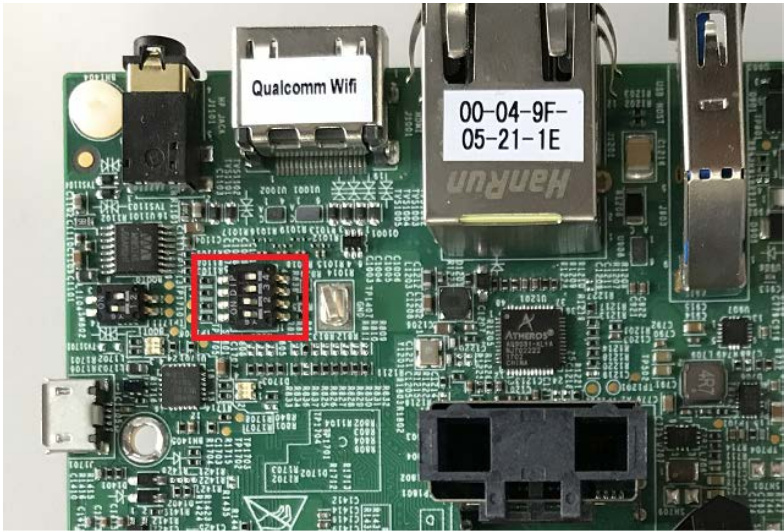
次の表には、 i.MX8MQuad EVKボード上のeMMCからブートするためのブート・スイッチの設定(ブート・プロセスで優先される)が列挙されています。
| スイッチ | D1 | D2 | D3 | D4 |
|---|---|---|---|---|
SW801 |
OFF | OFF | ON | OFF |
SW802 |
ON | OFF | - | - |
1.6 電源の接続
12 V電源のプラグをDC電源ジャックJ902に接続します。電源スイッチSW701をONにスライドさせて、EVKボードの電源を入れます。
スイッチ (SW701) を使用してボードの電源を入れます。プロセッサがオンチップROMコードから実行を開始します。デフォルトのブート・スイッチ設定では、このコードにより、ブータブル・イメージが格納されているメディアを指定するヒューズが読み取られます。ブータブル・イメージが見つかると、U-Bootの実行が自動的に開始されます。
Cortex-A53の小さい番号のシリアル・コンソールに情報が表示されます(例:WindowsではCOM9、Linuxでは/dev/ttyUSB*)。U-Bootプロセスを停止しない場合は、引き続きLinuxカーネルのブートが実行されます。
1.7 Androidのブートの完了
ブート・プロセス中に、HDMIディスプレイにAndroidのロゴが表示されます。HDMIの出力解像度は1080P固定であることに注意してください。変更する場合は、Androidのドキュメントをご確認ください。
ブート・プロセスが完了すると、Android UIが表示されます。マウスで操作を開始できます。
2. 組込みLinux®
このセクションは、ボードにLinuxオペレーティング・システムをロードする場合にのみ適用されます。
i.MX Linuxボード・サポート・パッケージ (BSP) は、特定のi.MX開発プラットフォームで組込みLinuxイメージをブートするために使用されるバイナリ・ファイル、ソース・コード、およびサポート・ファイルの集まりです。
Linuxバイナリ・デモ・ファイルの現在のリリースは、i.MXのLinuxダウンロード・ページにあります。詳細については、Linuxユーザー・ガイドおよびLinuxリファレンス・マニュアルを参照してください。その他のドキュメントは、i.MX Linuxドキュメント・バンドル、またはi.MXソフトウェアおよび開発ツールのLinuxのセクションで入手できます。
2.1 概要
i.MXボードでLinux OSカーネルがブートできるようになる前に、Linuxイメージがブート・デバイス(SDカード、eMMCなど)にコピーされ、そのデバイスをブートするようにブート・スイッチが設定されます。
各種のボードやブート・デバイス用のLinux BSPイメージをダウンロードするには、さまざまな方法があります。
このスタート・ガイドでは、Linux BSPイメージをSDカードに転送するいくつかの方法のみを示します。経験豊富なLinux開発者は、他のオプションを検討することもできます。
ホスト・マシンで使用されているOSに応じて、Linux BSPイメージをSDカードに転送する方法は異なります。
詳細な手順については、以下のオプションを選択してください。
付属のUSBケーブルのmicro B側をデバッグUARTポートJ1701に接続します。ケーブルのもう一方の端をホスト・コンピュータに接続します。
ターミナル・アプリケーションの使用方法がわからない場合は、ホスト・マシンのオペレーティング・システムに応じて、次のいずれかのチュートリアルを試してください。
Linux
NXP Linux BSPのビルド済みイメージのダウンロード
.sdcardファイルは、任意のSDカードに直接書き込まれるディスク・イメージです。これは、i.MX8MQuad EVKボードの起動に必要なすべてのコンポーネントを最も簡単にロードできる方法です。i.MX8MQuad EVK用の最新のビルド済みイメージは、Linuxのダウンロード・ページから入手できます。
ビルド済みのNXP Linuxバイナリ・デモ・イメージは、プロセッサの使用および評価のための標準的なシステムと基本的な機能のセットを提供します。システムを変更する必要なしに、ユーザーはハードウェアのインターフェースを評価し、SoC機能をテストし、ユーザー空間のアプリケーションを実行できます。
ボードを起動してLinuxを実行するには、ブート・イメージに次の4つの要素が必要です。
- ブート・ローダ (U-Boot)
- Linuxカーネル・イメージ (
zImage) - 使用中のボードのデバイス・ツリー・ファイル (
.dtb) - 特定のLinuxイメージ用のルート・ファイル・システム (
rootfs)
1つの.sdcardイメージ・ファイルの中に、これら4つの要素が含まれています。
より柔軟性が必要な場合は、SDカードに個々のコンポーネント(ブート・ローダ、カーネル、dtbファイル、rootfsファイル)を1つずつロードするか、.sdcardイメージをロードして個々の部分を特定のコンポーネントで上書きします。
Linuxホスト・コンピュータからSDカードのディスク・イメージを書き込む
BSPパッケージをLinuxダウンロード・ページからダウンロードしたら、i.MX8MQuad EVKボード専用のビルド済みSDカード・イメージが圧縮ファイル内にあることを確認します。SDカード・イメージの名前は次のとおりです。
-.sdcard SDカードが挿入されたSD/MMCカード・リーダーをLinux OSが実行されているホスト・マシンに接続します。
ホストで実行中のLinux OSカーネルによって、SD/MMCカード・リーダーにデバイス・ノードが割り当てられます。
SD/MMCカードに割り当てられたデバイス・ノードを識別するには、ホスト・コンピュータで次のコマンドを実行します。
$ cat /proc/partitions以下の手順を実行するとSDカードの既存のコンテンツが完全に削除されるため、不適切に実行されるとPCに危険をもたらす恐れがあります。ご不明な点や詳細情報については、 i.MX Linuxユーザー・ガイドを参照してください。
次のコマンドを実行して、SDカード・イメージをSD/MMCカードにコピーします。以下の/dev/sdXを、SDカードで使用されているものと一致するように変更します。
$ sudo dd if=.sdcard of=/dev/sdX bs=1M && sync パーティションを手動で設定するには、i.MX Linuxユーザー・ガイドの4.3.3をお読みください。
SDカード・イメージを使用せず、各コンポーネントを個別にロードするには、i.MX Linuxユーザー・ガイドの4.3.4~4.3.6を参照してください。
ユーザーは、ソース・コードとドキュメントを使用して、デバイス用にビルドされたLinuxイメージをカスタマイズできます。システム・コンポーネントの追加や削除などが可能です。
独自のLinux BSPイメージをビルドする(オプション)
NXP Linux BSPイメージをビルドするには、i.MX GitHubリポジトリからソース・コードを取得します。
イメージをビルドする方法の詳細な手順については、Linuxユーザー・ガイドに記載されています。
Yocto Project
NXPは、カスタム・イメージをビルドするためのフレームワークをオプションとして提供しています。Yocto Projectは推奨されるフレームワークで、Linuxカーネルのブートに使用するイメージをカスタマイズするNXPプロフェッショナル・サポートが付属しますが、他の方法を選択することもできます。
Yocto Projectの設定方法の詳細は、このスタート・ガイドには記載されていません。詳細については、NXPのYoctoユーザー・ガイドを参照してください。
Windows
製造ツールを使用してNXP Linux BSPイメージを書き込む
MFGToolという製造ツールは、Windows OSのホスト・コンピュータからi.MXボードにイメージをロードする作業に推奨されるNXPツールです。MFGToolは、i.MXボード上のさまざまなデバイスに画像をダウンロードするために使用されます。
以下の手順を実行して、ボードのイメージを書き込みます。
- ビルド済みLinux BSPイメージのダウンロード・バンドルにある圧縮ファイルを見つけます。
- 選択した場所に
L4.9.88_2.0.0-ga_mfg-tools.tar.gzファイルを解凍します。このファイルには2つの異なるMFGTool構成があり、一方にはrootfsイメージが含まれ、もう一方には含まれていません。このチュートリアルではmfgtools-with-rootfs.zipを解凍します。この例では、それによりMFGTool- Dirという名前のディレクトリが作成されます。 MFGTool-Dir/Profiles/Linux/OS Firmware/filesディレクトリ内のファイルを確認してください。ファイルがない場合は、ビルド済みイメージからファイルをコピーします。- ボードの
SW802(ブート・モード)を01(ビット1からビット2へ)に変更して、書き込みモードに移行させます。 - ボードの電源をオンにします。ボードのOTGポートのUSBケーブルを使用し、Windows OSを実行しているコンピュータをボードに接続します。
- 次の表に示すように、ターゲット・デバイスに応じた
*.vbsファイルをダブルクリックします。 -
[Start(開始)]をクリックして、イメージの書き込みを開始します。
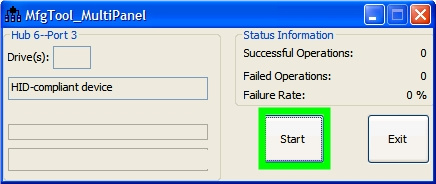
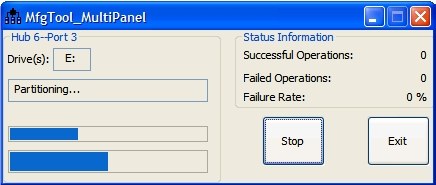
次の図は書き込み中に表示される画面で、ステータス・バーは書き込みの進捗状況を示しています。書き込みは、ホスト・マシンの構成によっては1~2分かかる場合があります。
次の図は、書き込みが完了したときのツールの状態を示しています。
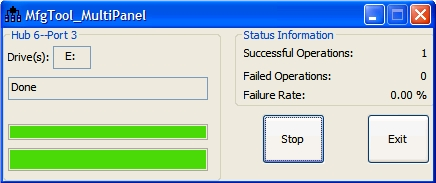
- [Stop(停止)]をクリックして、USBケーブルを外します。
SW801(ブート・モード)を1100に、SW802を10に切り替えて、ボードをJ1601ブート・モードに戻します。
ボードの電源を入れた後、SDカードを接続する必要があります。
| ターゲット・デバイスとブート・ストレージのVBSファイル | *VBSファイル |
|---|---|
| i.MX8MQuad EVK | mfgtool2-yocto-mx8-evk-sdcard-sd2.vbs |
3. 組込みAndroid
このセクションでは、i.MX8MQuad EVKボードに組込みAndroidシステム・イメージをロードするブート・プロセスについて説明し、独自のシステム・イメージを作成するソフトウェア・コンポーネントの作成方法をご紹介します。Androidプラットフォームのビルドの詳細については、ドキュメントを参照してください
現在のリリースには、デモ・イメージ、ソース・コード、ドキュメントが含まれています。これらは、i.MXソフトウェアと開発ツールのAndroidのセクションにもあります。
3.1 概要
開発システム上のストレージ・デバイス(MMC/SDまたはNAND)は、U-Bootブート・ローダを使用してプログラムする必要があります。ブート・プロセスでは、スイッチの設定に基づいて、どのストレージ・デバイスにアクセスするかを決定します。ブート・ローダがロードされて実行が開始されると、U-Boot環境空間が読み取られ、ブート・プロセスの実行方法が決定されます。
イメージは、ビルド済みのリリース・パッケージから取得することも、ソース・コードから作成することもできます。入手方法に関係なく、すべてのAndroidイメージには以下のコンポーネントが含まれます。
-
U-Bootイメージ:
u-boot.imx -
ブート・イメージ:
boot.img -
Androidシステム・ルート・イメージ:
system.img -
リカバリ・ルート・イメージ:
recovery.img
Android BSPの詳細については、Androidユーザー・ガイドを参照してください。
ホスト・マシンで使用されているOSに応じて、Android BSPイメージをSDカードに転送する方法は異なります。
Linux
NXP Android BSPイメージのダウンロード
ビルド済みのNXP Androidデモ・イメージは、評価を目的とした特定の機能を備えたデフォルトのシステムを提供します。システムを変更することなく、ユーザーはいくつかの基本的な操作を実行し、システムと対話しながらハードウェア・インターフェースをテストし、ユーザー空間でソフトウェア・アプリケーションを開発できます。
パッケージのビルド済みイメージは、ブート・デバイスごとに分類され、デバイス名のディレクトリに格納されます。最新のビルド済みイメージ・ファイルは、i.MXソフトウェアおよび開発ツールのAndroidのセクション、またはデモ・イメージのダウンロード・リンクにあります。
SDカードへのイメージの読み込みとパーティション分割
ビルド済みのイメージをダウンロードすると、以下のスクリプトを使用してSDカードをパーティション分割できるようになります。
$ cd ${MY_ANDROID}/ $ sudo ./device/fsl/common/tools/fsl-sdcard-partition.sh -f imx8mq /dev/sdX /dev/sdXのXは、「a」から「z」までのディスク・インデックスのいずれかとなります。これは、Linux OSを実行しているコンピュータごとに異なります。
重要:SDカードは、少なくとも8 GBの容量が必要です。
以下に示すように、SDカードのサイズによってパーティション・スクリプトが異なります。
-
8 GBのSDカードの場合は、次のコマンドを使用します。
$ sudo ./device/fsl/common/tools/fsl-sdcard-partition.sh -f imx8mq /dev/sdX -
16 GBのSDカードの場合は、次のコマンドを使用します。
$ sudo ./device/fsl/common/tools/fsl-sdcard-partition.sh -f imx8mq -c 14 /dev/sdX -
32 GBのSDカードの場合は、次のコマンドを使用します。
$ sudo ./device/fsl/common/tools/fsl-sdcard-partition.sh -f imx8mq -c 28 /dev/sdX - スクリプト実行前にSDカードのすべてのパーティションをアンマウントする場合は、次のコマンドを使用します。
$ umount /dev/sdX
関連するブート・ローダ、ブート・イメージ、システム・イメージ、リカバリ・イメージ、GPTイメージ、ベンダー・イメージを現在のディレクトリにコピーします。
このスクリプトでは、simg2imgツールをコンピュータにインストールする必要があります。simg2imgは、Linux OSホスト・コンピュータ上のスパース形式のイメージをRaw形式のイメージに変換するツールです。android-tools-fsutilsパッケージには、Ubuntu Linux OS向けのsimg2imgコマンドが含まれています。
独自のAndroid BSPイメージをビルドする(オプション)
Androidのソース・ファイルをビルドするには、Linux OSを実行しているホスト・コンピュータが必要です。Ubuntu 14.04(64ビット)バージョンは、NXP Android BSPリリースで最も多くテストされたOSです。
Androidのビルドに必要なすべてのパッケージがインストールされているか確認します。Androidウェブサイトのドキュメントにある「デバイスの設定」を参照してください。
Androidのウェブサイトで要求されるパッケージ以外に追加のパッケージをインストールする場合には、「Androidユーザー・ガイド」を参照してください。これはドキュメント・バンドルに含まれています。
ソース・コード
GoogleリポジトリからAndroid ソース・コードを取得するには、ソース・コード・パッケージ内に用意されているマニフェストとスクリプトを使用します 。
$ sudo apt-get install repo $ source ~/imx-o8.1.0_1.3.0_8mq_ga/imx_android_setup.sh デフォルトでは、imx_android_setup.shスクリプトによって~/android_buildフォルダにソース・コードのビルド環境が構築されます。
$ export MY_ANDROID=~/android_build ビルド
ビルド構成コマンドlunchは、引数の文字列で発行できます。
- type> i.MX8MQuad EVKボードのユーザー・タイプでAndroidイメージをビルドする方法の例を以下に示します。
$ cd ~/myandroid $ source build/envsetup.sh $ lunch evk_8mq-user $ make 2>&1 | tee build-log.txt makeコマンドの完了時には、build-log.txtファイルに実行された出力が取り込まれています。エラーがないか確認してください。
ソース・コード・パッケージのデフォルト設定では、ブート・ストレージとして内部eMMCが使用されます。SDカードに変更するには、ドキュメント・バンドル内にある「Androidユーザー・ガイド」を参照してください。
ドキュメント・バンドル内のドキュメントには、Androidのソース・コードをビルド、カスタマイズ、変更する方法に関するいくつかの追加情報が記載されています。
Windows
WindowsでのUUUのダウンロード
UUU GitHubのページから最新の安定ファイルをダウンロードします。UUUに関する詳細なチュートリアルは、こちらにあります
- uuu.exe
- libusb-1.0.dll
- シリアルUSBドライバ(お使いのボードとWindowsのインストール環境によって異なります)
最新のAndroidイメージのダウンロード
Androidのデモ・ファイルをNXP.comからダウンロードします。
ダウンロードしたファイルを適切なディレクトリに展開します。
NXP Linux BSPイメージをボードに書き込む
「WindowsでのUUUのダウンロード」セクションでダウンロードしたuuuという名前のファイルを、Androidのデモを展開したディレクトリにコピーします。
コマンド・プロンプトを開き、Androidのデモを展開したディレクトリに移動します
> uuu.exe uuu-android-mx8mm-evk-sd.lstSDカードをコネクタJ1701に挿入します。シリアル・ダウンロード・モードでボードの電源を入れると、uuuはボードへのイメージのコピーを開始します。ボードをシリアル・ダウンロード・モードにするには、「ブート・スイッチの設定」セクションを参照し、指示に従ってください。
完了したら、ボードの電源を切ります。「ブート・スイッチの設定」を参照して、SDカードからブートするようにボードを設定します。
4. MCUXpresso SDK
MCUXpressoソフトウェア開発キット (MCUXpresso SDK) は、i.MX8MQuad M4コアで実行される包括的なソフトウェア・ソース・コードを提供します。現時点でi.MX8MQuadでCortex-M4を有効にしたくない場合は、このセクションをスキップできます。
4.1 概要
MCUXpresso SDKは、Cortex-M4をスタンドアロンまたはAコアとともに使用する組込みアプリケーションの開発用に設計されています。MCUXpresso SDKは、ペリフェラル・ドライバに加えて、基本的なペリフェラルの使用例からデモ・アプリケーションまでをカバーする豊富なサンプル・アプリケーションのセットを提供します。MCUXpresso SDKには、RTOSカーネルとデバイス・スタック、および迅速な開発をサポートするさまざまなミドルウェアも含まれています。
ホスト・マシンで使用されているOSに応じて、デモの作成および展開の方法が異なります。
詳細な手順については、以下のオプションを選択してください。
Linux
LinuxでMCUXpresso SDKをダウンロードする
MCUXpresso SDKおよびソース・コードの現在のリリースについては、MCUXpresso SDK Builderをご覧ください 。
i.MX8MQuad向けMCUXpresso SDKをダウンロードするには、次の手順に従ってください。
-
[Select Development Board(開発ボードの選択)]をクリックします。
-
[Select a Device, Board, or Kit(デバイス、ボード、またはキットを選択)]から[
evkmimx8mq]を選択し、右側にある[Build MCUXpresso SDK(MCUXpresso SDKのビルド)]をクリックします。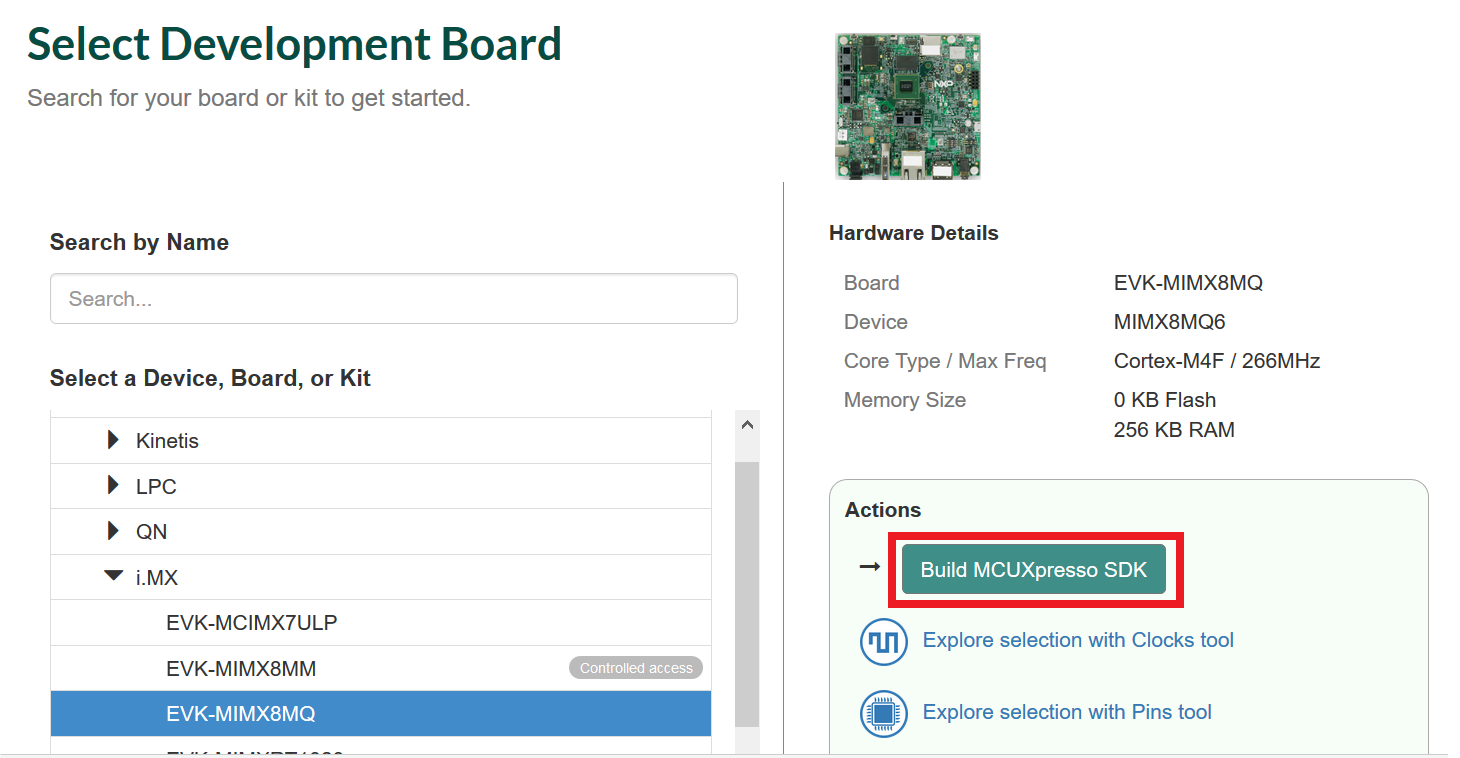
-
[Host OS(ホストOS)]で
Linuxを選択します。 -
[Toolchain/IDE(ツールチェーン/IDE)]で[
GCC Arm Embedded]を選択します。 -
[Select Optional Middleware(最適なミドルウェアを選択)]で[Select All(すべてを選択)]をクリックし、[Save changes(変更を保存)]をクリックします。
-
[Request Build(ビルドのリクエスト)]をクリックします。
-
SDKがパッケージをビルドしてダウンロードするのを待ちます。
LinuxでのMCUXpresso SDKのビルドとツールチェーンのインストール
-
launchpad.net/gcc-arm-embeddedからインストーラをダウンロードして、実行します。これは実際のツールチェーンです。ツールチェーンには、コンパイラやリンカなどが含まれます。ダウンロード済みのパッケージにあるMCUXpresso SDKリリース・ノートに記載されている、サポート対象の最新バージョンのGCCツールチェーンを使用する必要があります。 -
ツールチェーンの場所を
ArmGCC_DIRとしてエクスポートします。$ export ArmGCC_DIR=/usr -
CMakeがインストールされていることを確認します。
$ sudo apt-get install cmake
$ sudo apt-get install gcc-arm-none-eabi
MCUXpresso SDKのビルド
-
コマンド・ウィンドウのディレクトリをdemo armgccディレクトリに変更し、次のビルド・コマンドを実行します。
$/boards/evkmimx8mq/demo_apps/ /armgcc $ ./build_all.sh -
各MCUXpresso SDKプロジェクトに対して、以下の2つのプロジェクト設定(ビルド・ターゲット)がサポートされます。
デバッグ
コンパイラ最適化はローに設定され、実行ファイルのデバッグ情報が生成されます。開発時やデバッグ時には、このターゲットを選択します。
リリース
コンパイラ最適化はハイに設定され、デバッグ情報は生成されません。最終的なアプリケーション実装時には、このターゲットを選択します。
-
上記のコマンドでは、デバッグとリリースのバイナリ (
sdk20-app.bin.) が生成されます。これらのファイルは、「debug(デバッグ)」フォルダと「release(リリース)」フォルダにあります。 - ブータブル・イメージ
sdk20-app.binをSDカードのブート・パーティションにコピーします。
U-Bootを使用したアプリケーションの実行
このセクションでは、SDカードとi.MXプロセッサ用のビルド済みU-Bootイメージを使用してアプリケーションを実行する方法について説明します。
-
[Embedded Linux®(組込みLinux)]タブの手順に従い、i.MX8MQuadプロセッサ向けLinux BSPパッケージに含まれるビルド済みU-Boot + Linuxイメージを格納したSDカードを用意します。すでにSDカードにLinuxイメージをロードしている場合は、この手順をスキップできます。
- SDカードをホスト・コンピュータ(LinuxまたはWindows)に挿入し、アプリケーション・イメージ(
sdk20-app.binなど)をSDカードのFATパーティションにコピーします。 - SDカードを安全な方法でPCから取り外します。
- SDカードをターゲット・ボードに挿入します。デフォルトのブートSDスロットを使用していることを確認し、「ブート・スイッチの設定」を再確認してください。検証ボードのデフォルト設定では
J1601からブートします。EVKボードには、ブート用のSDスロットが1つしかありません。 -
ボードのDEBUG UARTスロットをUSBケーブルでPCに接続します。Windows OSはUSBドライバを自動的にインストールし、Ubuntu OSはシリアル・デバイスも検出します。
シリアル通信アプリケーションの詳細については、「パッケージの内容」の「シリアル通信コンソールの設定」セクションを参照してください。
- i.MX8MQuad EVKボードの2番目に列挙されたシリアル・ポートの2番目のターミナル・エミュレータを開きます。これはCortex-M4のシリアル・コンソールです。速度を
115200ビット/秒、8データ・ビット、パリティなしに設定し、ボードの電源を入れます。 -
ボードの電源を入れ、U-Bootのカウントダウンがゼロになる前に、任意のキーを押してブート・プロセスを停止します。最初のターミナル・エミュレータのU-Bootプロンプトで、U-Bootへの以下のコマンドを入力します。
=> fatload mmc 1:1 0x7e0000 sdk20-app.bin=> bootaux 0x7e0000これらのコマンドは、SDカードの最初のパーティションにあるイメージ・ファイルをCortex-M4のメモリにコピーし、Cortex-M4のリセットを解除します。
Windows
WindowsでMCUXpresso SDKをダウンロードする
MCUXpresso SDKおよびソース・コードの現在のリリースについては、MCUXpresso SDK Builderをご覧ください 。
i.MX8MQuad向けMCUXpresso SDKをダウンロードするには、次の手順に従ってください。
-
[Select Development Board(開発ボードの選択)]をクリックします。
-
[Select a Device, Board, or Kit(デバイス、ボード、またはキットを選択)]から[
evkmimx8mq]を選択し、右側にある[Build MCUXpresso SDK(MCUXpresso SDKのビルド)]をクリックします。 -
[Host OS(ホストOS)]で
Linuxを選択します。 -
[Toolchain/IDE(ツールチェーン/IDE)]で[
GCC Arm Embedded]を選択します。 -
[Select Optional Middleware(最適なミドルウェアを選択)]で[Select All(すべてを選択)]をクリックし、[Save changes(変更を保存)]をクリックします。
-
[Request Build(ビルドのリクエスト)]をクリックします。
-
SDKがパッケージをビルドしてダウンロードするのを待ちます。
WindowsでのNXP MCUXpresso SDKのビルドとツールチェーンのインストール
launchpad.net/gcc-arm-embeddedからインストーラをダウンロードして、実行します。これは実際のツールチェーンです。ツールチェーンには、コンパイラやリンカなどが含まれます。ツールチェーンには、コンパイラやリンカなどが含まれます。ダウンロード済みのパッケージにあるMCUXpresso SDKリリース・ノートに記載されている、サポート対象の最新バージョンのGCCツールチェーンを使用する必要があります。
MinGWのインストール
MinGW (Minimalist GNU for Windows) 開発ツールは、サード・パーティ製のCランタイムDLL(Cygwinなど)に依存しないツール・セットを備えています。MCUXpresso SDKで使用されているビルド環境では、MinGWビルド・ツールを利用せず、MinGWとMSYSのベース・インストールを活用しています。MSYSは、Unix系のインターフェースと各種ツールを備えた基本シェルを提供します。
-
最新のMinGW mingw-get-setupインストーラをSourceforgeのウェブサイトからダウンロードします
-
インストーラを実行します。インストール・パスとしては「
C:\MinGW」を推奨しますが、他のどの場所にでもインストールできます。 -
[Basic Setup(基本セットアップ)]で
mingw32-baseとmsys-baseが選択されていることを確認します。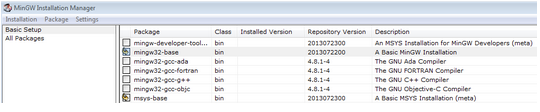
-
[
Installation(インストール)]メニューで[Apply Changes(変更を適用)]をクリックし、残りの手順に従ってインストールを完了します。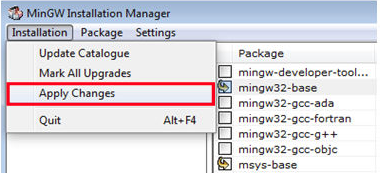
-
Windows OSのPath環境変数に適切なアイテムを追加します。これは、[Control Panel(コントロール・パネル)]>[System and Security(システムとセキュリティ)]>[System(システム)]>[Advanced System Settings(システムの詳細設定)]の[Environment Variables...(環境変数)]セクションで設定します。パスは
\bin 重要:デフォルトのインストール・パスである
C:\MinGWを使用した例を以下に示します。パスが正しく設定されていないと、ツールチェーンは機能しません。PATH変数にC:\MinGW\msys\x.x\binが設定されている場合(KSDK 1.0.0向けの旧仕様)、これを削除してください。削除されていないと、新しいGCCビルド・システムが正しく機能しない場合があります。 -
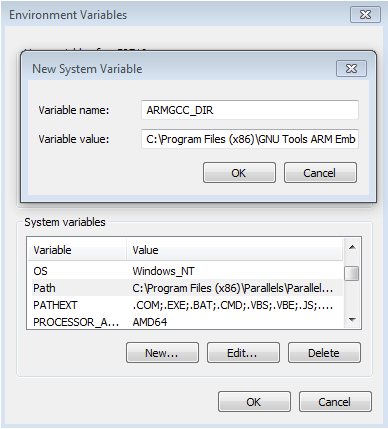
新しいシステム環境変数を作成して、「
ArmGCC_DIR」という名前を付けます。この変数の値で、Arm® GCC Embeddedツールチェーンのインストール・パスを指定します。今回の例では、C:\Program Files (x86)\GNU Tools Arm Embedded\4.8 2014q3になります。インストール・フォルダの正確なパス名については、GNU Arm GCC Embeddedツールのインストール・フォルダを参照してください。
CMakeのインストール
-
CMake 3.0.xをダウンロードします
-
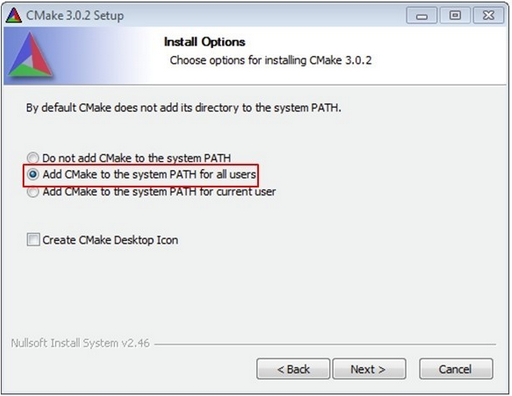
CMakeをインストールする前に、必ず[Add CMake to system PATH(CMakeをシステム・パスに追加)]オプションを選択してください。すべてのユーザーが使用できるパスにインストールするか、現在のユーザーのみが使用できるパスにインストールするかは、ユーザーが選択します。今回の例では、すべてのユーザーに対してインストールしています。
- インストーラの残りの手順に従います。
MCUXpresso SDK
-
GCC Arm Embeddedツールチェーンのコマンド・ウィンドウを開きます。ウィンドウを開くには、Windows OSの[スタート]メニューから、[プログラム]>[GNU Tools Arm Embedded
]に移動して、[GCC Command Prompt(GCCコマンド・プロンプト)]を選択します。 
-
コマンド・ウィンドウのディレクトリをdemo
armgccディレクトリに変更し、次のビルド・コマンドを実行します。\boards\evkmimx8mq\demo_apps\ \armgcc または、エクスプローラで
build_ all.batファイルをダブルクリックし、ビルドを実行します。次のような出力画面が表示されます。
-
各MCUXpresso SDKプロジェクトに対して、以下の2つのプロジェクト設定(ビルド・ターゲット)がサポートされます。
-
コンパイラ最適化はローに設定され、実行ファイルのデバッグ情報が生成されます。開発時やデバッグ時には、このターゲットを選択します。
-
コンパイラ最適化はハイに設定され、デバッグ情報は生成されません。最終的なアプリケーション実装時には、このターゲットを選択してください。
デバッグ
リリース
-
-
上記のコマンドでは、デバッグとリリースのバイナリ (
sdk20-app.bin.) が生成されます。これらのファイルは、「debug(デバッグ)」フォルダと「release(リリース)」フォルダにあります。 - ブータブル・イメージ
sdk20-app.binをSDカードのブート・パーティションにコピーします。
U-Bootを使用したアプリケーションの実行
このセクションでは、SDカードとi.MXプロセッサ用のビルド済みU-Bootイメージを使用してアプリケーションを実行する方法について説明します。
- [Embedded Linux®(組込みLinux)]タブの手順に従い、i.MX8MQuadプロセッサ向けLinux BSPパッケージに含まれるビルド済みU-Boot + Linuxイメージを格納したSDカードを用意します。すでにSDカードにLinuxイメージをロードしている場合は、この手順をスキップできます。
- SDカードをホスト・コンピュータ(LinuxまたはWindows)に挿入し、実行したいアプリケーション・イメージ(
sdk20-app.binなど)をSDカードのFATパーティションにコピーします。 - SDカードを安全な方法でPCから取り外します。
- SDカードをターゲット・ボードに挿入します。デフォルトのブートSDスロットを使用していることを確認し、「ブート・スイッチの設定」を再確認してください。検証ボードのデフォルト設定では
J1601からブートします。EVKボードには、ブート用のSDスロットが1つしかありません。 -
ボードのDEBUG UARTスロットをUSBケーブルでPCに接続します。Windows OSはUSBドライバを自動的にインストールし、Ubuntu OSはシリアル・デバイスも検出します。
シリアル通信アプリケーションの詳細については、「パッケージの内容」の「シリアル通信コンソールの設定」セクションを参照してください。
- i.MX8MQuad EVKボードの2番目に列挙されたシリアル・ポートの2番目のターミナル・エミュレータを開きます。これはCortex-M4のシリアル・コンソールです。速度を
115200ビット/秒、8データ・ビット、パリティなしに設定し、ボードの電源を入れます。 -
ボードの電源を入れ、U-Bootのカウントダウンがゼロになる前に、任意のキーを押してブート・プロセスを停止します。最初のターミナル・エミュレータのU-Bootプロンプトで、U-Bootへの以下のコマンドを入力します。
=> fatload mmc 1:1 0x7e0000 sdk20-app.bin=> bootaux 0x7e0000
このコマンドによって、SDカードの最初のパーティションにあるMCUXpressoSDKメモリ・イメージ・ファイルがCortex-M4のメモリにコピーされ、Cortex-M4のリセットが解除されます。
セキュリティと整合性
セキュリティと整合性
| ドキュメントとビデオ | 説明 |
|---|---|
| AN12714 CAAMセキュリティ・キーを使用したi.MX暗号化ストレージ | i.MXの暗号化アクセラレータおよび保証モジュール (CAAM) が提供するセキュリティ・キー機能を利用して、DM-Cryptによる透過的ストレージ暗号化をブロック・レベルで実行する手順について説明します。 |
| AN12632 i.MX 8Mおよびi.MX 8MMでの拡張OpenSSL | このアプリケーション・ノートでは、暗号化アクセラレータおよび保証モジュール (CAAM) による高速化OP-TEE OSのサポートをOpenSSLに追加する方法について説明します。結果として、OP-TEEを介して安全な方法で暗号アルゴリズムを高速化できる拡張されたOpenSSLが得られます。 |
| Trusted Execution Environment:i.MXプロセッサにおけるOP-TEEのスタート・ガイド | TEEの概要、サンプルの使用例、およびOP-TEEによるi.MXハードウェアのセキュリティ機能の活用方法について説明します。 |
| AN12838 CAAMセキュリティ・キーを使用した公開鍵暗号の強化 | i.MXアプリケーション・プロセッサで提供されているBlack Key機能に基づいた公開鍵暗号化スキームについて説明します。 |
| エッジをセキュアに:製造の保護:非セキュアな環境における機密データのプロビジョニング | このウェビナーでは、製造の保護機能の概要、およびこの機能を使用して機密データをセキュアに転送およびインストールする方法について説明します。 |
| AN4581 HABv4対応デバイスでの i.MXセキュア・ブート | このアプリケーション・ノートでは、HABv4を含む、i.MXアプリケーション・プロセッサ向けセキュア・ブートのリファレンスを提供し、署名付きイメージの生成やICをセキュアに動作させる設定の例を示します。 |
CAAMモジュールの例
i.MX 8M SoCには、暗号化と復号化のプロセスをハードウェアで高速化するために、CryptoDevを介して使用できる暗号化アクセラレーションおよび保証モジュール (CAAM) が含まれています。CAAMモジュールはSoC上にあるため、i.MX8M EVKボードでも同様にサポートされています。大量のデータを扱う場合や、パフォーマンスが重要なアプリケーションでは、このモジュールを使用することをお勧めします。
速度パフォーマンスの確認
OpenSSLは、セキュリティ・プロトコルのSSL (Secure Sockets Layer) とTLS (Transport Layer Security) を定義するオープン・ソース・プロジェクトです。盗聴を防ぐために安全な情報送信を必要とするアプリケーションで使用できるソフトウェア・ライブラリが含まれています。
OpenSSLには、目的の暗号化アルゴリズムでの暗号化パフォーマンスをテストするspeedコマンドが含まれています。この例で使用されるアルゴリズムは、Cipher Block Chaining (CBC) 動作モードと128ビット・ブロックを備えたAdvanced Encryption Standard (AES) 暗号化アルゴリズムを実装するaes-128-cbcです。
OpenSSLの速度テストは、次のコマンドを使用して確認できます。
# openssl speed -evp aes-128-cbc
Doing aes-128-cbc for 3s on 16 size blocks: 43389139 aes-128-cbc's in 2.99s
Doing aes-128-cbc for 3s on 64 size blocks: 28788614 aes-128-cbc's in 3.00s
Doing aes-128-cbc for 3s on 256 size blocks: 11766741 aes-128-cbc's in 2.99s
Doing aes-128-cbc for 3s on 1024 size blocks: 3674139 aes-128-cbc's in 2.99s
Doing aes-128-cbc for 3s on 8192 size blocks: 495157 aes-128-cbc's in 3.00s
OpenSSL 1.0.2p 14 Aug 2018
built on: reproducible build, date unspecified
options:bn(64,64) rc4(ptr,char) des(idx,cisc,16,int) aes(partial) idea(int) blowfish(ptr)
compiler: arm-poky-linux-gnueabi-gcc -march=armv7ve -mfpu=neon -mfloat-abi=hard -mcpu=cortex-a7 -DL_ENDIAN -DTERMIO -O2 -pipe -g -feliminate-unused-debug-types -Wall -Wa,--noexecstack -DHAVE_CRYPTODEV -DUSE_CRYPTODEV_DIGESTS
The 'numbers' are in 1000s of bytes per second processed. type 16 bytes 64 bytes 256 bytes 1024 bytes 8192 bytes
Aes-128-cbc 193627.86k 513839.78k 837089.96k 1048974.64k 1130986.42k
ソリューション:ドキュメント「AN12838 CAAMセキュリティ・キーを使用した公開鍵暗号の強化」のセクション5.2.1および5.2.2で、使用方法の詳細について説明しています。
有線通信
有線通信
i.MXボードでLinuxが実行されている状態で、i.MX SoCに備わる特別な機能を評価できます。このチュートリアルでは、i.MX 8M EVKを使用してLinuxでインターネットに接続する手順を説明します。
- ボードの
RJ-45コネクタにイーサネット・ケーブルを接続します - ボードをブートし、Linuxプロンプトが表示されるまで待ちます
- Linuxプロンプトで、次のコマンドを入力します
#Log in: root # ifconfig eth0 - 機能を確認するために、任意のサイトに対してpingを実行します
# ping 8.8.8.8 PING 8.8.8.8 (8.8.8.8) 56(84) bytes of data.
64 bytes from 8.8.8.8: icmp_seq=1 ttl=119 time=4.81 ms 64 bytes
from 8.8.8.8: icmp_seq=2 ttl=119 time=4.87 ms 64 bytes
from 8.8.8.8: icmp_seq=3 ttl=119 time=4.94 ms 64 bytes
from 8.8.8.8: icmp_seq=4 ttl=119 time=4.61 ms
ワイヤレス・コネクティビティ
ワイヤレス・コネクティビティ
| ドキュメントとビデオ | 説明 |
|---|---|
| クラウド・コネクティビティ | Amazon Web Services、Microsoft Azure、Google Cloud IoTなどのクラウド・サービスの統合サポート。 |
| Linux OSを実行するi.MX 8M Quad EVK上のNXPベースのWiFiモジュールのスタート・ガイド | このマニュアルでは、i.MX 8M Quad EVKの起動、BSPイメージの設定、NXPベースのワイヤレス・モジュールとのハードウェア接続、Wi-FiおよびBluetoothインターフェースの起動方法について取り上げています。 |
| i.MX 8M Quad EVKにおけるNXPベースのワイヤレス・モジュールの機能設定ガイド | このドキュメントでは、Azurewave AW-CM358MA (88W8987) およびAzurewave AW-CM276MA (88W8997) ワイヤレス・モジュールを搭載したi.MX 8M Quad EVKのWi-Fi/Bluetoothの機能と構成について記載しています。Wi-FiおよびBluetoothインターフェースの初期化と設定について取り上げています。 |
パワーマネジメント
パワーマネジメント
PF4210は 、i.MX 8M向けに最適化されたNXPの14チャネル・パワーマネジメントICです。
| ドキュメントとビデオ | 説明 |
|---|---|
| AN12118 i.MX 8M Quadの消費電力の測定 | NXP EVKプラットフォームで実施されるi.MX 8M Quadアプリケーション・プロセッサの電流ドレイン測定について、いくつかの使用例を用いて説明しています。 |
| AN12225 i.MX8MでA53を使用してM4を動作させる際にSoCの電力を削減する方法 | AMPアプリケーションでは、VDD_SOC電流がユーザーの想定を超えることがあります。このドキュメントでは、根本原因と解決策について説明しています。 |
| i.MX 8MM上のM4の低消費電力に関するデモ | i.MX 8M EVKの消費電力をテストできるようになります。 |
低消費電力モードへのサスペンドの例
i.MXボードでLinuxが実行されている状態で、i.MX SoCに備わる特別な機能を評価できます。この例では、低消費電力モードへのサスペンドと、通常の動作に戻す方法を示します。
次のコマンドを入力して、ボードのウェイクアップ・ソースとしてシリアルTTYを有効にします。
パス:
# echo enabled > /sys/class/tty/ttymxc0/power/wakeup次のコマンドを入力して、Suspend-To-RAMモードに入ります。
# echo mem > /sys/power/state
PM: suspend entry (deep)
PM: Syncing filesystems ... done.
Freezing user space processes ... (elapsed 0.001 seconds) done.
OOM killer disabled.
Freezing remaining freezable tasks ... (elapsed 0.000 seconds) done.
Suspending console(s) (use no_console_suspend to debug)
SW1701スイッチを押して、ボードをウェイクアップします。ターミナルに次のメッセージが表示されます。
HIFsuspendwow TODO
PM: suspend devices took 0.112 seconds Disabling non-boot CPUs ...
CPU1: shutdown
psci: CPU1 killed.
CPU2: shutdown
psci: CPU2 killed.
CPU3: shutdown
psci: Retrying again to check for CPU kill
psci: CPU3 killed.
Enabling non-boot CPUs ...
Detected VIPT I-cache on CPU1
GICv3: CPU1: found redistributor 1 region 0:0x00000000388a0000
CPU1: Booted secondary processor [410fd034]
cache: parent cpu1 should not be sleeping CPU1 is up Detected VIPT I-cache on CPU2
GICv3: CPU2: found redistributor 2 region 0:0x00000000388c0000
CPU2: Booted secondary processor [410fd034]
cache: parent cpu2 should not be sleeping CPU2 is up Detected VIPT I-cache on CPU3
GICv3: CPU3: found redistributor 3 region 0:0x00000000388e0000
CPU3: Booted secondary processor [410fd034]
cache: parent cpu3 should not be sleeping
CPU3 is up
PM: resume devices took 0.028 seconds
OOM killer enabled.
Restarting tasks ... done.
PM: suspend exit
オーディオ
オーディオ
| ドキュメントとビデオ | 説明 |
|---|---|
| i.MX 8プロセッサ向けDSP Concepts製品 | i.MX 8Mファミリ向けDSP Conceptsオーディオ・プラットフォーム製品について紹介しています。 |
| AN12195 i.MX8Mへの低消費電力オーディオの実装 | このドキュメントでは、i.MX 8Mにおける低消費電力オーディオ・アプリケーション設計について説明しています。 |
シンプルなオーディオの例
このシンプルなオーディオの例は、audiotestsrcとalsasinkの間のリンクを示しています。
i.MX 8M EVKボードのオーディオ・ジャックにイヤホンを接続します。
イヤホンにマイク機能(4つの接点を持つTRRS)が付いている場合は、マイク・ジャックを最後まで押し込まないでください。1つの接点リングを外側に残します。
#aplay -1
**** List of PLAYBACK Hardware Devices ****
card 0: imxspdif [imx-spdif], device 0: S/PDIF PCM snd-soc-dummy-dai-0 [S/PDIF PCM snd-soc-dummy-dai-0]
Subdevices: 1/1
Subdevice #0: subdevice #0
card 2: wm8524audio [wm8524-audio], device 0: HiFi wm8524-hifi-0
[]
Subdevices: 1/1
Subdevice #0: subdevice #0
card 2: wm8524audio [wm8524-audio], device 1: HiFi-ASRC-FE (*)
[]
Subdevices: 1/1
Subdevice #0: subdevice #0
# gst-launch-1.0 audiotestsrc ! alsasink device=plughw:2
Setting pipeline to PAUSED ...
Pipeline is PREROLLING ...
Redistribute latency...
Pipeline is PREROLLED ...
Setting pipeline to PLAYING ...
New clock: GetAudioSinkClock
イヤホンで音が聞こえるはずです。
音を確認したら、キーボードの [Ctrl+C] を押してコマンド・ラインを終了します。
このシンプルなオーディオの例は、audiotestsrcとalsasinkの間のリンクを示しています。
i.MX 8M EVKボードのオーディオ・ジャックにイヤホンを接続します。
ビデオ・オーディオのデコーダの例
この例は、ビデオ・ファイルからオーディオだけをデコードする方法を説明します。SDカードのrootfsパーティションの/home/root/にビデオ・ファイルをコピーし、SDカードからボードをブートして、次のコマンドを実行します。
注:Big Buck Bunnyのサイトから、例で使用されているファイルを無料で入手できます。
# gplay-1.0 SampleVideo_1280x720_2mb.mp4
FSL_GPLAY2_01.00_LINUX build on Mar 12 2018 11:48:19
Set VideoSink kmssink
Set TextSink fakesink ====== AIUR: 4.3.4 build on Mar 12 2018 11:47:35. ======
Core: AVI_PARSER_03.05.29 build on Aug 31 2017 09:15:57
file: /usr/lib/imx-mm/parser/lib_avi_parser_arm_elinux.so.3.1
Track 00 [video]: Disabled
Codec: 4, SubCodec: 1
-----------------------
------------------------ Track 01 [audio_0] Enabled
Duration: 0:09:56.424000000
Language: und
Mime: audio/mpeg, mpegversion=(int)1, channels=(int)2, rate=(int)48000, bitrate=(int)0
codec_data=(buffer)014d401fffe10017674d401fda014016ec0440000003004000000c83c60ca801000468ef3c80
------------------------
====== BEEP: 4.3.4 build on Mar 12 2018 11:47:45. ======
Core: MP3 decoder Wrapper build on Jan 11 2018 10:20:25
file: /usr/lib/imx-mm/audio-codec/wrap/lib_mp3d_wrap_arm_elinux.so.3
CODEC: BLN_MAD-MMCODECS_MP3D_ARM_02.13.01_ARMV8 build on Jan 11 2018 10:05:45. [Stop (No Repeated)][Vol=1.0][00:00:00/00:09:56]=========== fsl_player_play()=========== FSL_GPLAY2_01.00_LINUX build on Mar 12 2018 11:48:19
[h]display the operation Help
[p]Play
[s]Stop
[e]Seek
[a]Pause when playing, play when paused
[v]Volume
[m]Switch to mute or not
[>]Play next file
[ [r]Switch to repeated mode or not
[u]Select the video track
[d]Select the audio track
[b]Select the subtitle track
[f]Set full screen
[z]resize the width and height
[t]Rotate
[c]Setting play rate
[i]Display the metadata
[x]eXit
State changed: buffering
State changed: playing
[Playing (No Repeated)][Vol =1.0][00:00:13/00:00:13]EOS Found
getNextItem No next item!
No more media file, exit gplay!
State changed: stopped
Exit display thread
FSL_PLAYER_UI_MSG_EXIT
fsl_player_deinit
ディスプレイとグラフィックス
ディスプレイとグラフィックス
| ドキュメントとビデオ | 説明 |
|---|---|
| i.MXグラフィックス・ユーザー・ガイド | グラフィック・アプリケーションやビデオ・ドライバを作成する開発者向けに、グラフィックAPIおよびドライバのサポートに関する情報を提供します。 |
| i.MX 8 GStreamerユーザー・ガイド | i.MX 8M EVKでのGStreamer version 1.0の使用方法について、詳細に説明しています。これには、デコード、エンコード、カメラ、ビデオ合成、ビデオのスケーリングと回転などの例が含まれます。 |
| NXP MCUと組込みウィザードを使用したリアルタイム・インダストリアルHMIシステムへのグラフィックスの実装 | NXPはTARA Systemsと連携し、イネーブリング・ソフトウェア・テクノロジとして組込み型のウィザードを提供しています。 |
| AN12189 i.MX 8M評価キット向けMX8-DSI-OLED1のクイック・スタート・ガイド | i.MX 8Mの概要と、Crank SoftwareのStoryboardと従来のUI開発ツールとの違いについて説明しています。 |
| AN12188 i.MX 8M評価キット向けIMX-MIPI-HDMIのクイック・スタート・ガイド | このドキュメントでは、i.MX 8M EVK、およびMIPI-DSI信号をHDMI信号に変換するIMX-MIPI-HDMIアクセサリ・カードの使用方法の概要を説明しています。 |
| AN12187 i.MX 8M評価キット向けMINISASTOCSIのクイック・スタート・ガイド | このドキュメントでは、i.MX 8M EVK、およびOmniVisionチップ・セットOV5640をベースにしたMIPI-CSIインターフェース・カメラ・キットであるMINISASTOCSIアクセサリ・カードの導入方法について簡単に説明します。 |
カメラ・インターフェース
カメラ・インターフェース
| ドキュメントとビデオ | 説明 |
|---|---|
| i.MX 8カメラのユース・ケース | i.MX 8 MIPI CSIのユース・ケース、Advanced GStreamerカメラのユース・ケース、i.MX 8M EVKBでサポートされている利用可能なカメラとドータ・カード、互換性のあるデバイス・ツリー (DTS) ファイル、およびさまざまなカメラ・オプションを有効化する方法について詳細に説明しています。 |
| i.MX 8 GStreamerユーザー・ガイド | NXP BSP L5.4.24_1.1.0でサポートされるすべてのi.MX 8ファミリSoCに搭載された、GStreamerバージョン 1.0ベースのアクセラレーテッド・ソリューションのユーザー・ガイド。 |
| AN12187 i.MX 8M評価キット向けMINISASTOCSIのクイック・スタート・ガイド | このドキュメントでは、i.MX 8M EVK、およびOmniVisionチップ・セットOV5640をベースにしたMIPI-CSIインターフェース・カメラ・キットであるMINISASTOCSIアクセサリ・カードの導入方法について簡単に説明します。 |
機械学習
機械学習
機械学習 (ML) は一般的に、人間が生み出した抽象概念の分類、認識、予測が求められる用途に幅広く対応します。画像認識、ジェスチャー認識、異常検出、音声のテキスト変換、テキストの音声変換、ASR、情景認識など、多くの例が挙げられます。ここでは、特に画像やビデオのストリームに適用されるNXP MLツールに焦点を当てます。オーディオのセクションで、ここに含まれるサンプルを参照している場合があります。
| ドキュメントとビデオ | 説明 |
|---|---|
| eIQ® MLソフトウェア開発環境 | NXPのMCU、i.MX RTクロスオーバーMCU、i.MXファミリSoCで、MLアルゴリズムを使用できるようになります。eIQソフトウェアには、推論エンジン、ニューラル・ネットワーク・コンパイラ、最適化されたライブラリが含まれています。 |
| i.MX機械学習ユーザー・ガイド | NXPのi.MX向けeIQ UMツールキットは、NXPのマイクロコントローラとアプリケーション・プロセッサを対象とした機械学習向けのライブラリと開発ツールのセットです。 |
| i.MXアプリケーション・プロセッサ向けNXP eIQ機械学習ソフトウェア開発環境 | このドキュメントは、i.MXファミリでサポートされているMLソフトウェアに関するガイドを提供します。eIQの概要、Yoctoのインストール・ガイド、およびサポートされているすべてのDNNおよび非DNNのサンプルを実行するためのステップ・バイ・ステップ・ガイドが含まれています。 |
| eIQに関するよくある質問 (FAQ) | このドキュメントでは、eIQと組込み機械学習に関してよく寄せられる質問のいくつかを取り上げています。 |
| AN13001 Glowのメモリの分析 | Glowコンパイラによって生成されたGlowメモリ情報を理解し、特定のモデルに必要なメモリを計算する方法を紹介します。このコンパイラは、モデルの実行に必要な最小メモリ・サイズを測定するために使用できます。 |
| AN12766 Tensor Flow LiteのK-Meansクラスタリングを使用した、eIQによる異常検出 | 異常検出を使用した機械状態監視アプリケーションを実現する手順を紹介します。 |
| i.MXアプリケーション・プロセッサ向けeIQソフトウェアのスタート・ガイド | ボードの開梱から実装、モデリング、エッジでの推論まで、NXP eIQ MLソフトウェア開発環境の使用に関する一連のステップ・バイ・ステップ・チュートリアル。 |
デバイス管理とセキュアOTA
デバイス管理とセキュアOTA
機械学習 (ML) は一般的に、人間が生み出した抽象概念の分類、認識、予測が求められる用途に幅広く対応します。画像認識、ジェスチャー認識、異常検出、音声のテキスト変換、テキストの音声変換、ASR、情景認識など、多くの例が挙げられます。ここでは、特に画像やビデオのストリームに適用されるNXP MLツールに焦点を当てます。オーディオのセクションで、ここに含まれるサンプルを参照している場合があります。
| ドキュメントとビデオ | 説明 |
|---|---|
| eIQ® MLソフトウェア開発環境 | NXPのMCU、i.MX RTクロスオーバーMCU、i.MXファミリSoCで、MLアルゴリズムを使用できるようになります。eIQソフトウェアには、推論エンジン、ニューラル・ネットワーク・コンパイラ、最適化されたライブラリが含まれています。 |
| i.MX機械学習ユーザー・ガイド | NXPのi.MX向けeIQ UMツールキットは、NXPのマイクロコントローラとアプリケーション・プロセッサを対象とした機械学習向けのライブラリと開発ツールのセットです。 |
| i.MXアプリケーション・プロセッサ向けNXP eIQ機械学習ソフトウェア開発環境 | このドキュメントは、i.MXファミリでサポートされているMLソフトウェアに関するガイドを提供します。eIQの概要、Yoctoのインストール・ガイド、およびサポートされているすべてのDNNおよび非DNNのサンプルを実行するためのステップ・バイ・ステップ・ガイドが含まれています。 |
| eIQに関するよくある質問 (FAQ) | このドキュメントでは、eIQと組込み機械学習に関してよく寄せられる質問のいくつかを取り上げています。 |
| AN13001 Glowのメモリの分析 | Glowコンパイラによって生成されたGlowメモリ情報を理解し、特定のモデルに必要なメモリを計算する方法を紹介します。このコンパイラは、モデルの実行に必要な最小メモリ・サイズを測定するために使用できます。 |
| AN12766 Tensor Flow LiteのK-Meansクラスタリングを使用した、eIQによる異常検出 | 異常検出を使用した機械状態監視アプリケーションを実現する手順を紹介します。 |
| i.MXアプリケーション・プロセッサ向けeIQソフトウェアのスタート・ガイド | ボードの開梱から実装、モデリング、エッジでの推論まで、NXP eIQ MLソフトウェア開発環境の使用に関する一連のステップ・バイ・ステップ・チュートリアル。 |
Minicomチュートリアル
シリアル通信コンソールの設定
Linuxホスト・マシンのコマンド・プロンプトで、次のコマンドを実行してポート番号を確認します。
$ ls /dev/ttyUSB* 数字の小さい方がArm® Cortex®-A53コアの番号、大きい方がArm® Cortex®-M4コアの番号です。
Minicom
次のコマンドを使用して、シリアル通信プログラム(例:minicom)をインストールし、実行します。
- Ubuntuパッケージ・マネージャを使用してMinicomをインストールします。
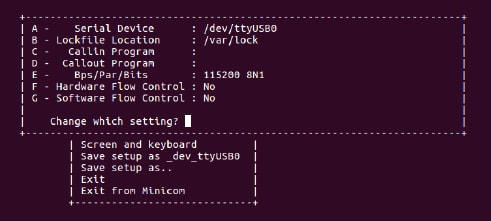
$ sudo apt-get install minicom - 前に確認したポート番号を使用して、コンソール・ウィンドウでMinicomを起動します。
$ sudo minicom /dev/ttyUSB* -s - Minicomを図3のように設定します
- 次のステップは、HDMIケーブルの接続です。
Tera Termチュートリアル
シリアル通信コンソールの設定
i.MX8MQuadのFTDI USBシリアル・チップは、2つのシリアル・ポートを列挙します。これらのポートをCOM9、COM10とします。小さい番号のポート (COM9) はArm® Cortex®-A53からのシリアル・コンソール通信用で、大きい番号のポート (COM10) はArm® Cortex®-M4コア用です。Serial-to-USBドライバは、FTDIチップ・ドライバから入手できます
Tera Term
オープン・ソースのターミナル・エミュレーション・アプリケーションです。このプログラムは、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示します。
- Tera Termをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
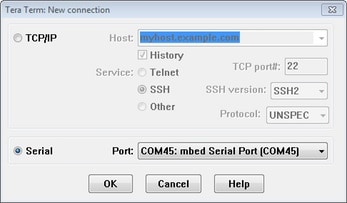
- TeraTermを起動します。初めて起動する際には、次のダイアログが表示されます。シリアル・オプションを選択します。ボードが接続されている場合は、COMポートが自動的にリスト内に表示されます。
- 事前に確認した
COMポート番号を使用して、シリアル・ポートをボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定します。この設定は[Setup(セットアップ)]>[Serial Port(シリアル・ポート)]から行うことができます。 - 接続が確立されているか検証します。確立されている場合、Tera Termのタイトル・バーに以下のように表示されます。
- 次のステップは、HDMIケーブルの接続です。
PuTTYチュートリアル
シリアル通信コンソールの設定
i.MX8MQuadのFTDI USBシリアル・チップは、2つのシリアル・ポートを列挙します。これらのポートをCOM9、COM10とします。小さい番号のポート (COM9) はArm® Cortex®-A53からのシリアル・コンソール通信用で、大きい番号のポート (COM10) はArm® Cortex®-M4用です。Serial-to-USBドライバは、FTDチップ・ドライバから入手できます
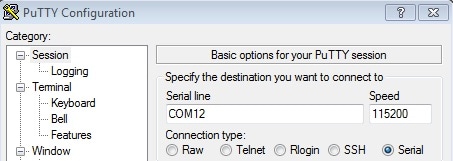
PuTTYは、広く利用されているターミナル・エミュレーション・アプリケーションです。このプログラムは、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示します。
- PuTTYをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- 選択したダウンロードのタイプに応じて、ダウンロードした実行ファイルをダブルクリックするか、[Start(スタート)]メニューから選択して、PuTTYを起動します。
- 起動後に表示されるウィンドウで設定を行います。[Serial(シリアル)]ラジオ・ボタンを選択し、前に確認した
COMポート番号を入力します。ボーレートもあわせて指定します。今回は「115200」を入力します。 - [Open(開く)]をクリックして、シリアル接続を確立します。ボードが接続されていて、正しい
COMポートが入力されていれば、ターミナル・ウィンドウが開きます。設定が正しくない場合は、アラートが表示されます。 - 次のステップは、HDMIケーブルの接続です。
設計・リソース
ボード情報
チップに関するドキュメント
ソフトウェア
i.MX8MQuad EVKのLinux BSPドキュメント
- L4.9.88_2.0.0ドキュメント・バンドル
- i.MX Linuxリリース・ノート
- i.MX Linuxユーザー・ガイド
- i.MX Yocto Projectユーザー・ガイド (Linux)
- i.MX VPU API Linuxリファレンス・マニュアル
- i.MX Yocto Project:よくある質問
- i.MX BSP移植ガイド
- i.MX Linuxリファレンス・マニュアル
- i.MXグラフィックス・ユーザー・ガイド (Linux)
i.MX8MQuad EVKのAndroid BSPドキュメント
サポート
トレーニング
次の段階に進むために、以下で適切な課題を見つけましょう。不明な点がある場合は、NXPサポートにお問い合わせください。
| トレーニング | 説明 |
|---|---|
| I.MX 8Mトレーニング | この製品に関するNXPのオンデマンド・トレーニング、ハウツー・ビデオ、およびウェビナーの全リスト。 |
フォーラム
NXPのいずれかのコミュニティ・サイトで、他のエンジニアとつながり、i.MX 8Mを使用した設計に関する専門的なアドバイスを受けることができます。
製品フォーラム:
- i.MXフォーラム
- i.MXプロセッサに関する役立つドキュメントとスレッド
- i.MXグラフィックス
- i.MXソリューション
- i.MX8 Coral開発キット
- パワーマネジメント
- ワイヤレス・コネクティビティ