アプリケーション・ノート (3)
-
TJA1040 high speed CAN transceiver[AN10211]
-
TJA1050 high speed CAN transceiver[AN00020]
サポート情報 (1)
-
Footprint for Wave Soldering[SO-SOJ-WAVE]
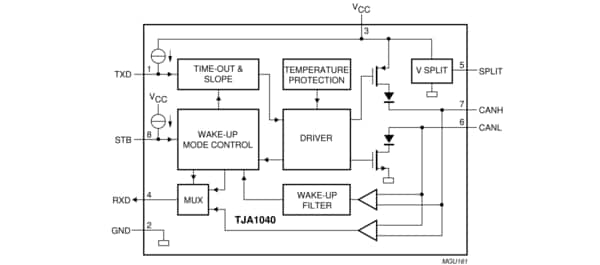
The TJA1040 is the interface between the controller area network (CAN) protocol controller and the physical bus. It is primarily intended for high speed applications, up to 1 MBaud, in passenger cars. The device provides differential transmit capability to the bus and differential receive capability to the CAN controller.
The TJA1040 is the next step up from the TJA1050 high speed CAN transceiver. Being pin compatible and offering the same excellent EMC performance, the TJA1040 also features:
This makes the TJA1040 an excellent choice in nodes, which can be in power down or standby mode in partially powered networks.
|
|
|
|
|
|
|
|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
クイック・リファレンス ドキュメンテーションの種類
8 ドキュメント
コンパクトリスト
完全な内訳を受け取ります。 製品の設置面積などについては、 eCad ファイル.
NXPから直接サポートを受けるには、以下のサイトをご覧ください。 エンジニアリング・サービス.
4 エンジニアリング・サービス



この製品をサポートするその他のパートナー製品を見つけるには、当社の Web サイトにアクセスしてください パートナーマーケットプレイス.
