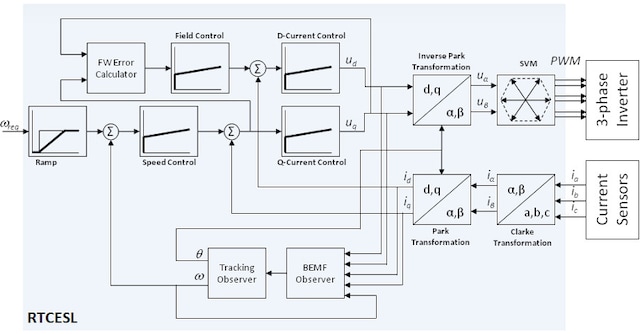
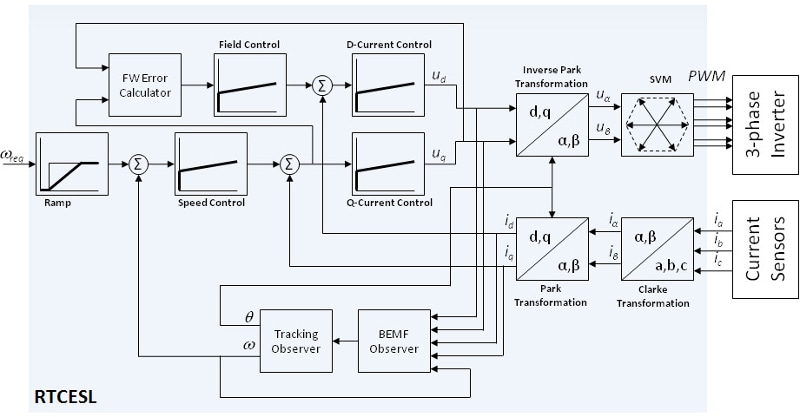
NXPのリアルタイム制御組込みソフトウェア・ライブラリ(Real-Time Control Embedded Software Libraries:RTCESL)(旧称Freescale Embedded Software Libraries:FSLESL)は、基本的な数値演算から高度な変換やオブザーバまで網羅したアルゴリズム・セットで、複雑なリアルタイム制御アプリケーションに容易に組み込むことができます。また、NXPのモータ制御リファレンス・デザインでも使用されています。これらのアルゴリズムを活用することで、先進的な高効率のモータ制御や電力変換など、膨大な演算処理と制御性能を必要とするアプリケーションにおいて、開発をスピードアップし、使いやすさを向上させることができます。
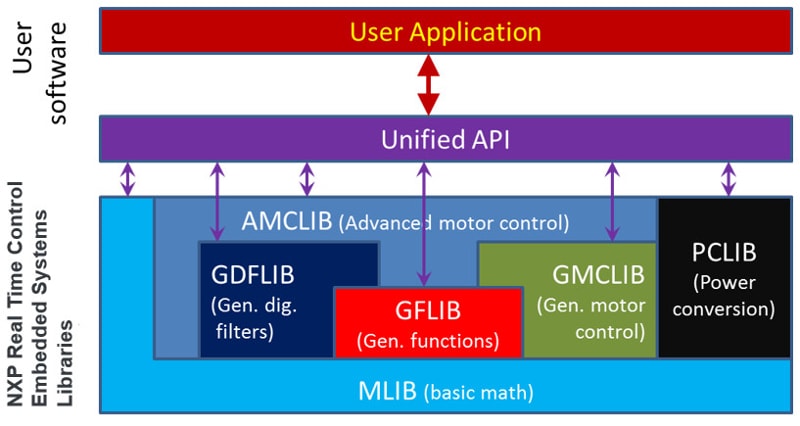
このライブラリは、高度に最適化されており、NXP製ハードウェアでテスト済みです。また、C言語での呼出しが可能な関数インターフェースを備えているため、操作性にも優れています。Cortex® M0+コア・ベースのデバイスが備えるMMDVSQ (Memory-Mapped Divide and Square Root Module) のような特定演算用のハードウェア・アクセラレータや、Cortex® M33コア・ベースのデバイスが備えるPowerQuad (PQ) ハードウェア・アクセラレータを使用できる場合、RTCESLでは、そのようなハードウェア・アクセラレータを使用して一部のアルゴリズムを処理し、より迅速な演算を行うことができます。関数は、NXPのMATLAB参照モデルへの対応が確認済みです。
ライブラリは現在、Kinetis® Arm® Cortex® M0+、M4、M7、M33、およびDSP56800E(X) コア搭載のデジタル・シグナル・コントローラ (DSC) で利用可能です。ライブラリ全体にユニバーサルAPIを導入し、APIの変換に役立つツールを提供しています。FSLESL 3.0またはMMCLIBで使用していたAPIから、最新のRTCESLリリースで使用される新しいユニバーサルAPIにすばやく移行するには、API Translatorを使用します。このシンプルなツールは、古いAPIを新しいバージョンに変換して、コードの移行を支援します。現在、[ダウンロード]タブから入手可能です。