

長期製品供給
対象製品には最低10年間の製品供給サポートが適用されます。自動車、通信、医療の各セグメント向けに開発された指定対象製品については、最低15年間の製品供給が保証されます。
TJA1042、TJA1044、TJA1049のセキュリティについては、セキュアCAN TJA1152をご覧ください。これらのデバイスでの、より高いデータ・レートについては、CAN SIC TJA1462をご覧ください。
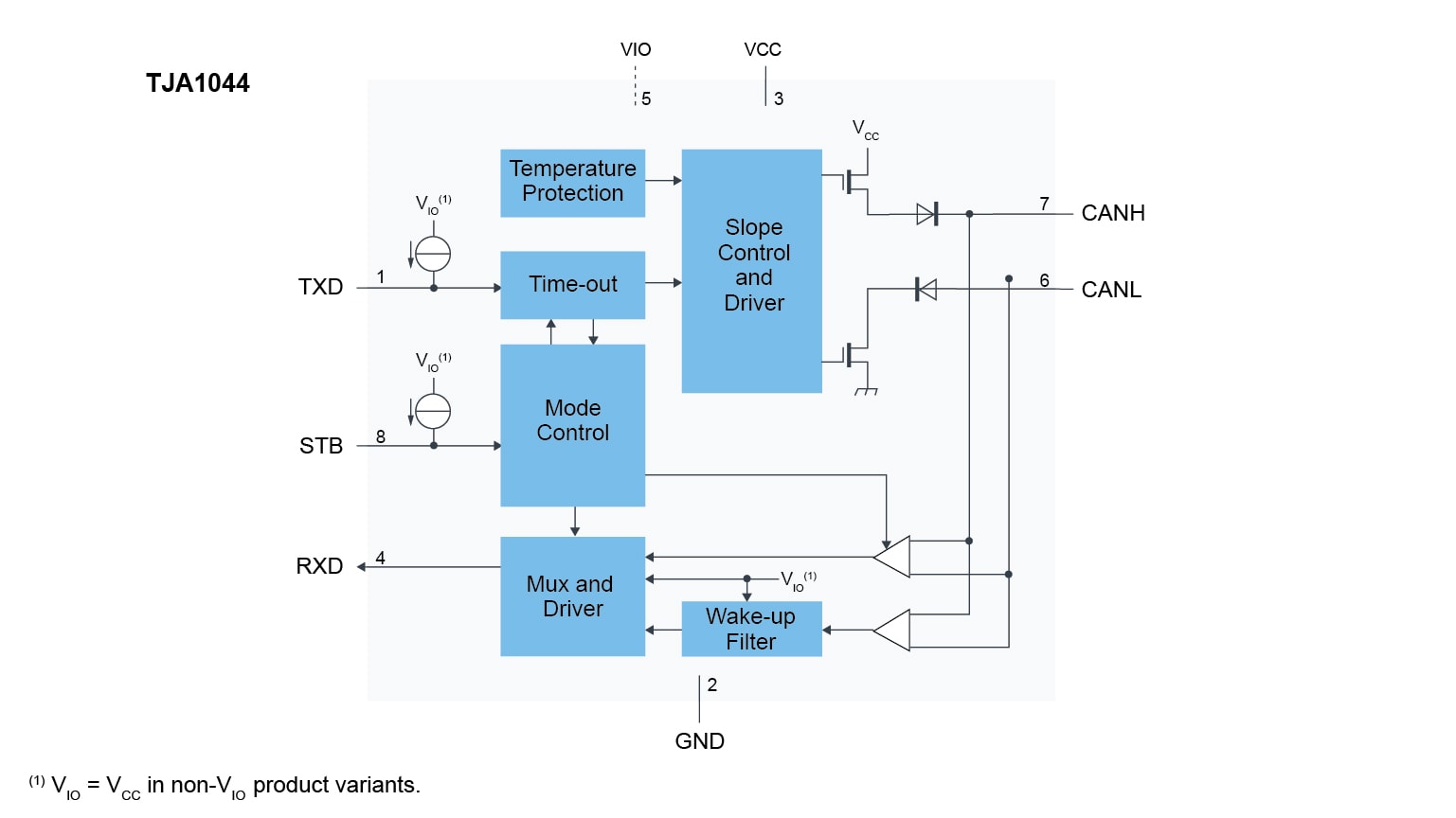
TJA1044は、Mantisファミリに属する高速CANトランシーバです。コントローラ・エリア・ネットワーク (CAN) プロトコル・コントローラと2線式CAN物理バスとの間のインターフェースを提供します。このトランシーバは、自動車業界の高速CANアプリケーション向けに設計されており、CANプロトコル・コントローラ(を備えたマイクロコントローラ)に差動送受信機能を提供します。電源電圧がオフのときには、CANバスに対して理想的なパッシブ動作を示します。
バス・ウェイクアップ機能を備えた超低消費電流のスタンバイ・モードを備え、コモン・モード・チョークなしでも優れたEMC性能を示します。VIOピンを備えたバージョンは、電源電圧が3.3 V~5 Vのマイクロコントローラに直接インターフェースできます。
これらの機能により、TJA1044は、CANバス経由のウェイクアップ機能を備えた低消費電力モードを必要とするノードにおいて、あらゆる種類のHS-CANネットワークに最適な選択肢となります。
TJA1044は、現行の11898-2:2016およびSAE J2284-1~SAE J2284-5で定義されているCAN物理層を実装しています。TJA1044Tでは、最大1 Mbit/sのデータ・レートが規定されています。他のバージョンでは、ループ遅延の対称性を定義する追加のタイミング・パラメータが規定されています。この実装により、CAN FD高速フェーズで最大5 Mbit/sのデータ・レートによる信頼性の高い通信が可能になります。
対象製品には最低10年間の製品供給サポートが適用されます。自動車、通信、医療の各セグメント向けに開発された指定対象製品については、最低15年間の製品供給が保証されます。

高速CANトランシーバ - Mantisファミリ
|
|
|
|
|
|
|
|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
クイック・リファレンス ドキュメンテーションの種類
9 ドキュメント
コンパクトリスト
完全な内訳を受け取ります。 製品の設置面積などについては、 eCad ファイル.
1-5 件/全 11 ハードウェア提供




NXPから直接サポートを受けるには、以下のサイトをご覧ください。 エンジニアリング・サービス.
2 エンジニアリング・サービス

この製品をサポートするその他のパートナー製品を見つけるには、当社の Web サイトにアクセスしてください パートナーマーケットプレイス.






