高出力48 Vアプリケーション向けS32K344モータ制御開発キットのスタート・ガイド
このドキュメントの内容
-
パッケージの内容
-
ソフトウェアの入手
-
接続
-
ビルドと実行
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
お客様の 高出力48 Vアプリケーション向けS32K344モータ制御開発キット
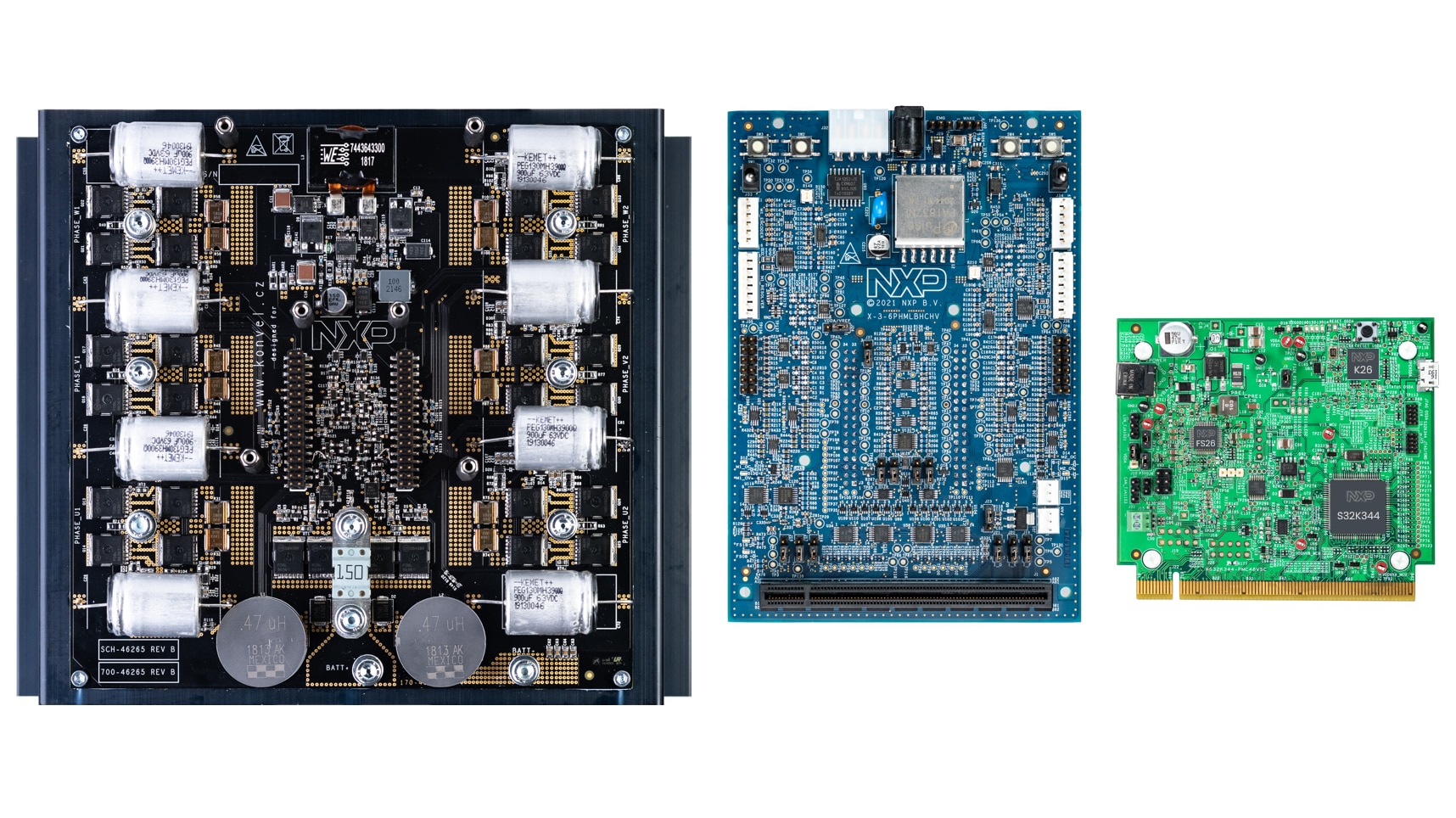
1. パッケージの内容

2. ソフトウェアの入手
資格情報を使用してNXPにサインインします 。
2.2 S32K3xx開発パッケージのダウンロード
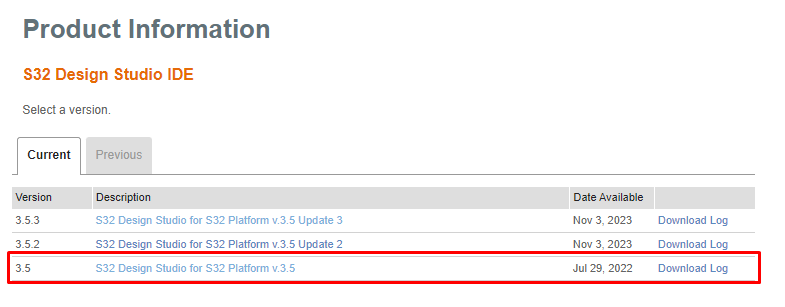
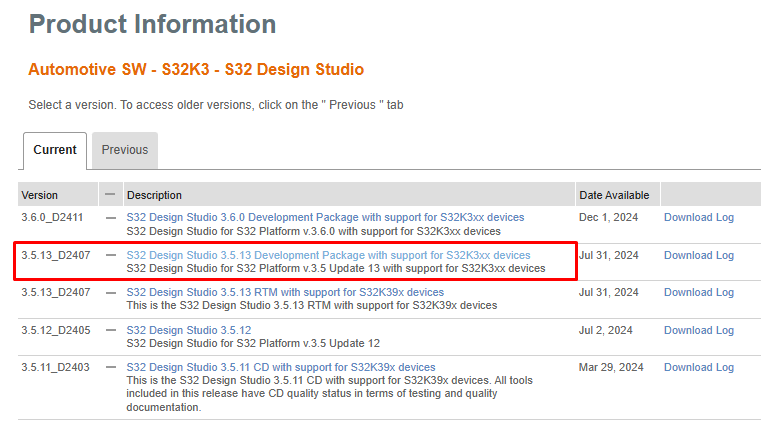
S32DS用のS32K3開発パッケージはS32DSから直接更新されますが、場合によっては手作業でダウンロードしてインストールする必要があります
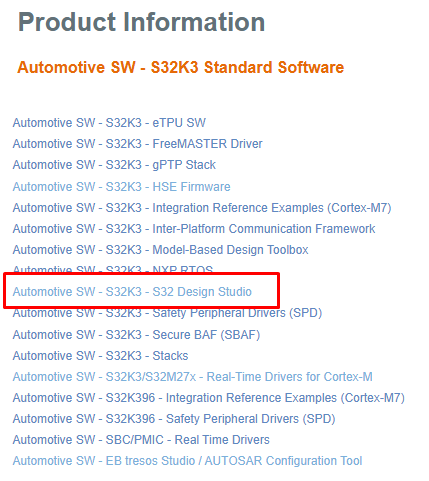
S32DS V3.5用のS32K3開発パッケージをダウンロードするには、S32K3標準ソフトウェア・パッケージにアクセスしてください
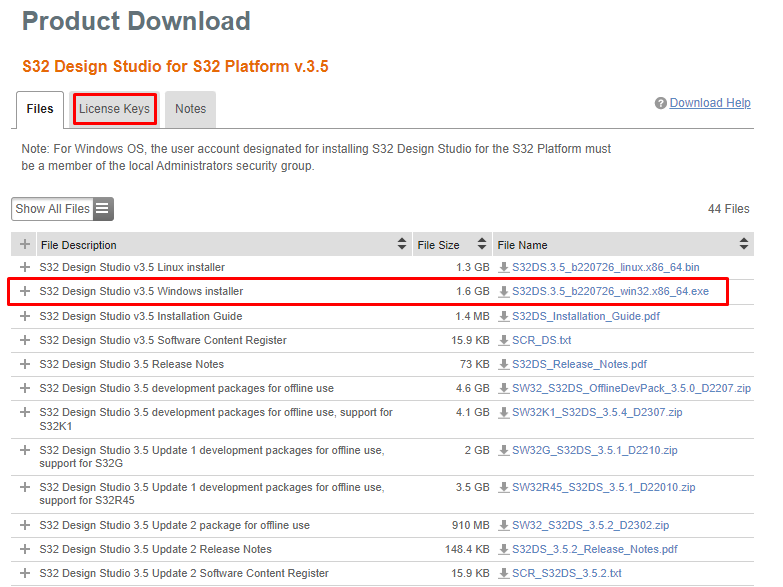
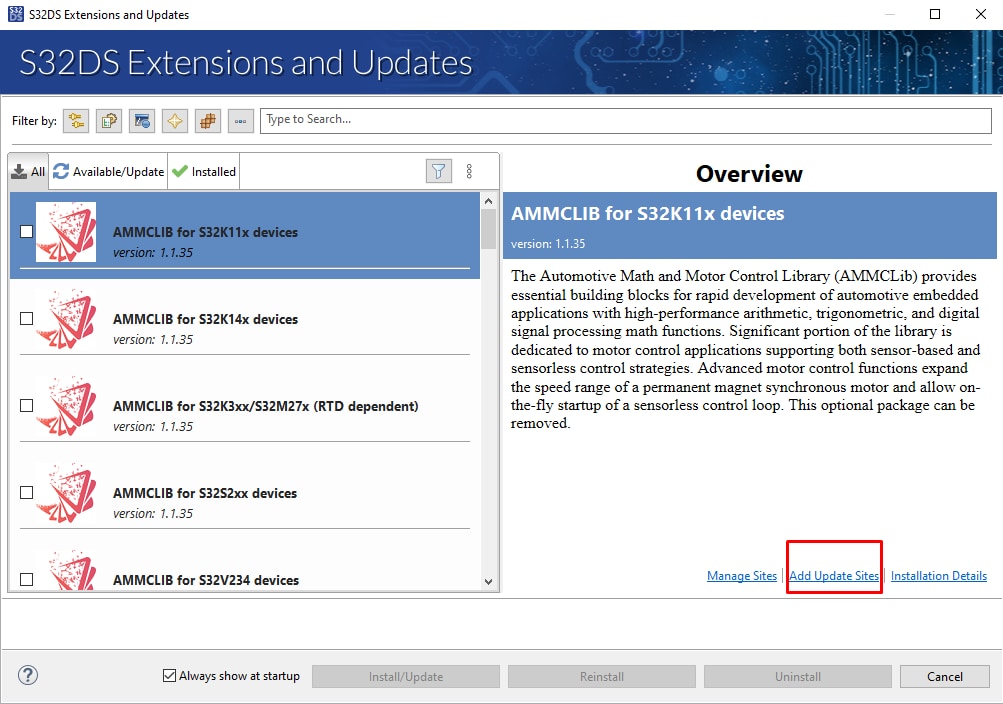
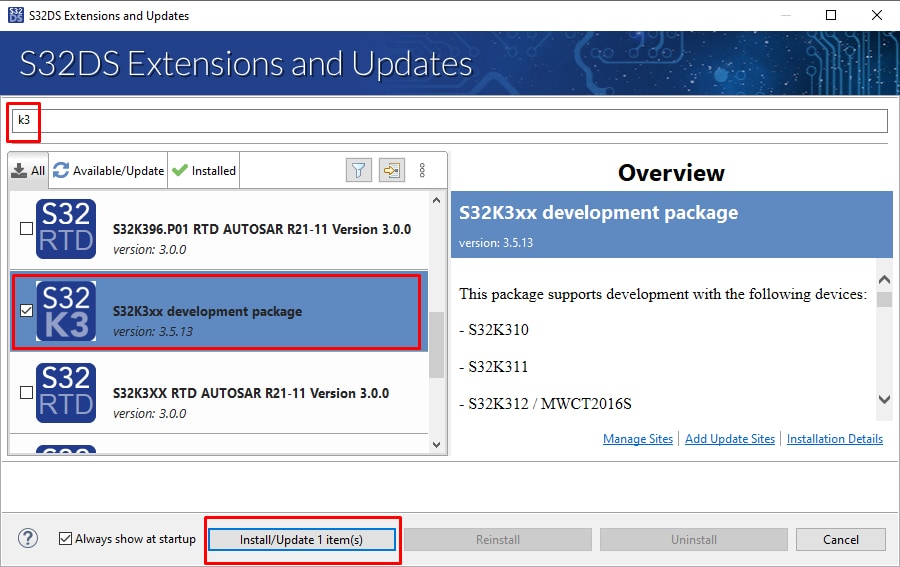
2.3 S32K3開発パッケージのインストール
- S32DSで、トップメニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開くと、[Add Update Sites(サイト更新を追加)]リンクが表示されます
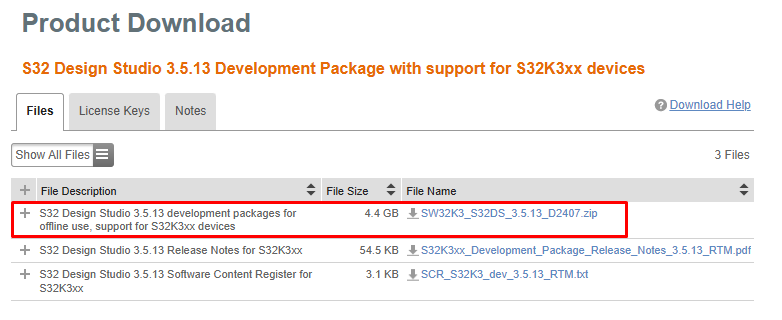
- ダウンロードした
SW32K3_S32DS_3.5.13_D2407.zipファイルを選択します - S32K3開発パッケージをインストールします
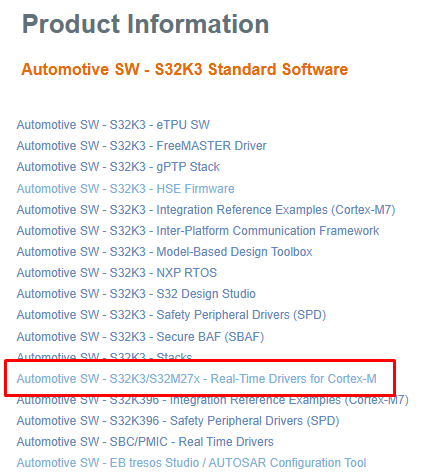
2.4 RTDドライバのダウンロード
S32K3およびS32M27xバージョン4.0.0に対応するRTDをダウンロードします。Automotive SW - S32K3/S32M27x - Real-Time Drivers for Cortex-Mパッケージを選択して、サイト更新ファイルをダウンロードします
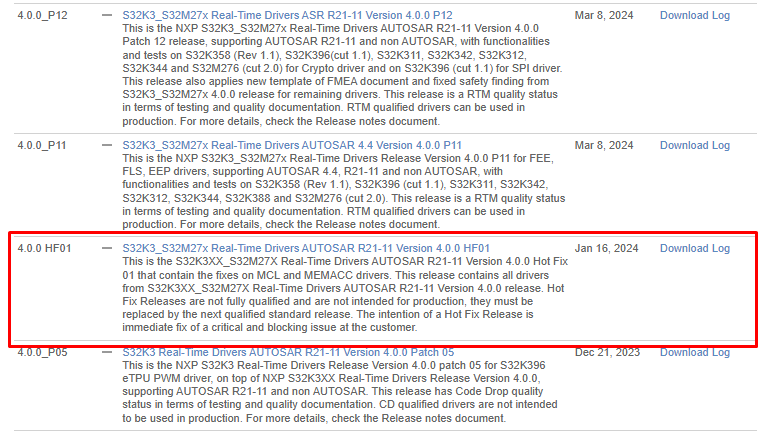
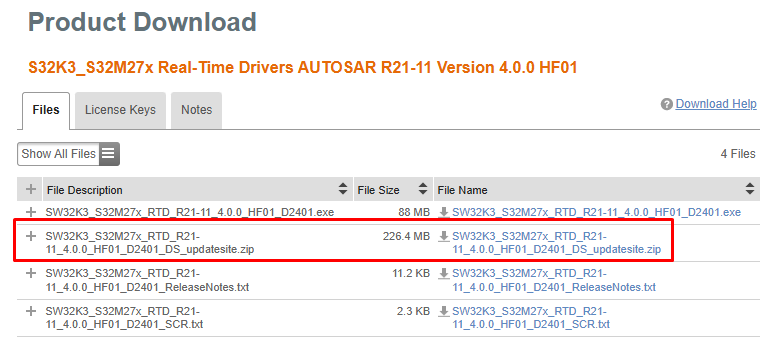
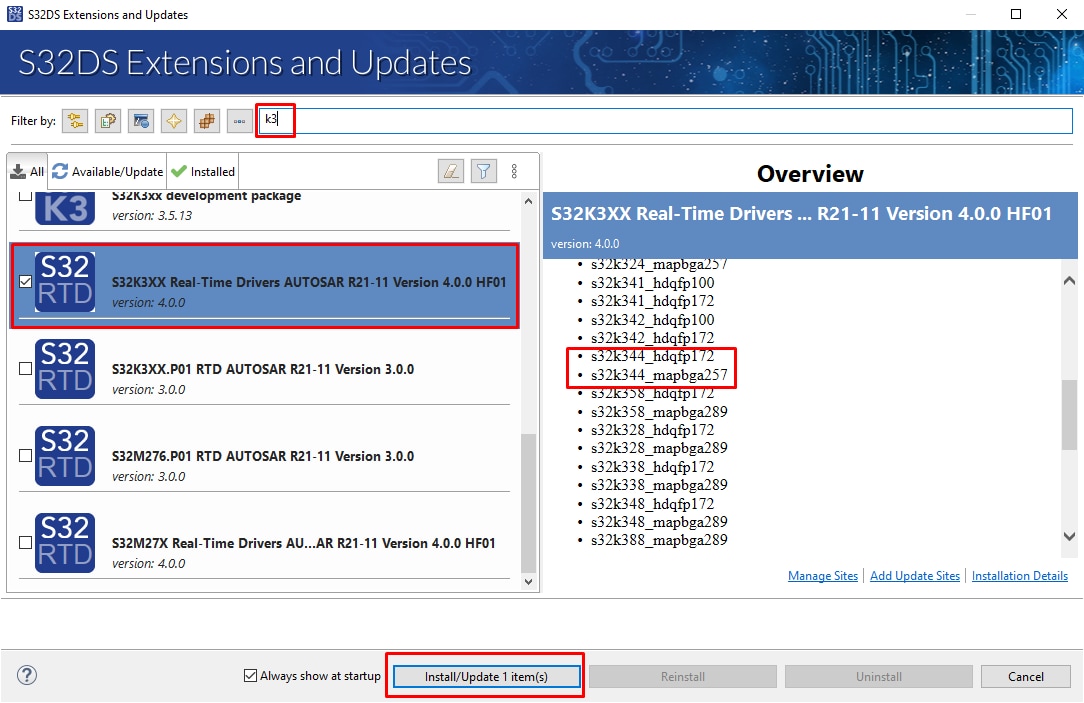
2.5 S32DSへのRTDドライバのインストール
- S32DSで、トップメニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開くと、[Add Update Sites(サイト更新を追加)]リンクが表示されます
- ダウンロードした
SW32K3_S32M27x_RTD_R21-11_4.0.0_HF01_D2401_DS_updatesite.zipという名前のファイルを選択します - リストからRTD 4.0.0 HF01をインストールしますが、RTD 4.0.0がリストに複数表示される場合があるため、必ずサポート対象にS32K344が含まれるバージョンを選択してください
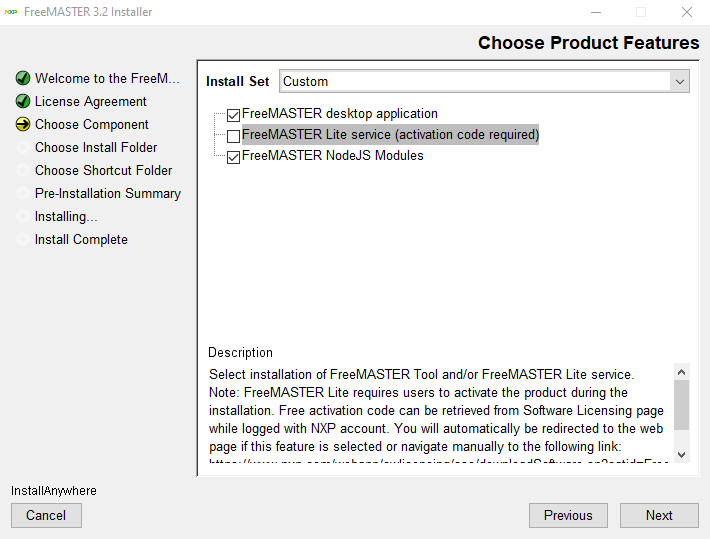
2.6 FreeMASTERアプリケーション・ツールの入手
リアルタイム・デバッグ用のFreeMASTERアプリケーション・ツールをダウンロードしてインストールします
ヒント:このセットアップでは(アクティベーション・コードが必要となる)Liteサービスのインストールを省略しても構いません
2.7 S32K3向け車載用モータ制御ライブラリ (AMMCLib) の入手
AMMCLib for S32K3(バージョン1.1.41以上)をダウンロードしてインストールします
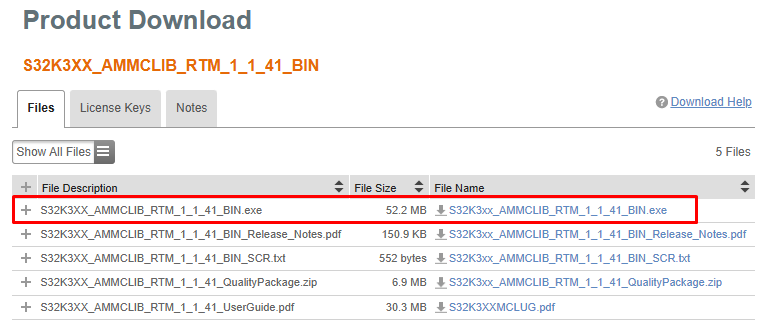
ヒント:可能であれば、AMMCLibのパスを簡単に変更できるように、デフォルトのパスにインストールしてください
2.8 MC_XTM4CK344モータ制御アプリケーションの入手
MC_XTM4CK344モータ制御アプリケーション・ソフトウェア (MC_XTM4CK344_SW.exe) をダウンロードしてインストールします

3. 接続
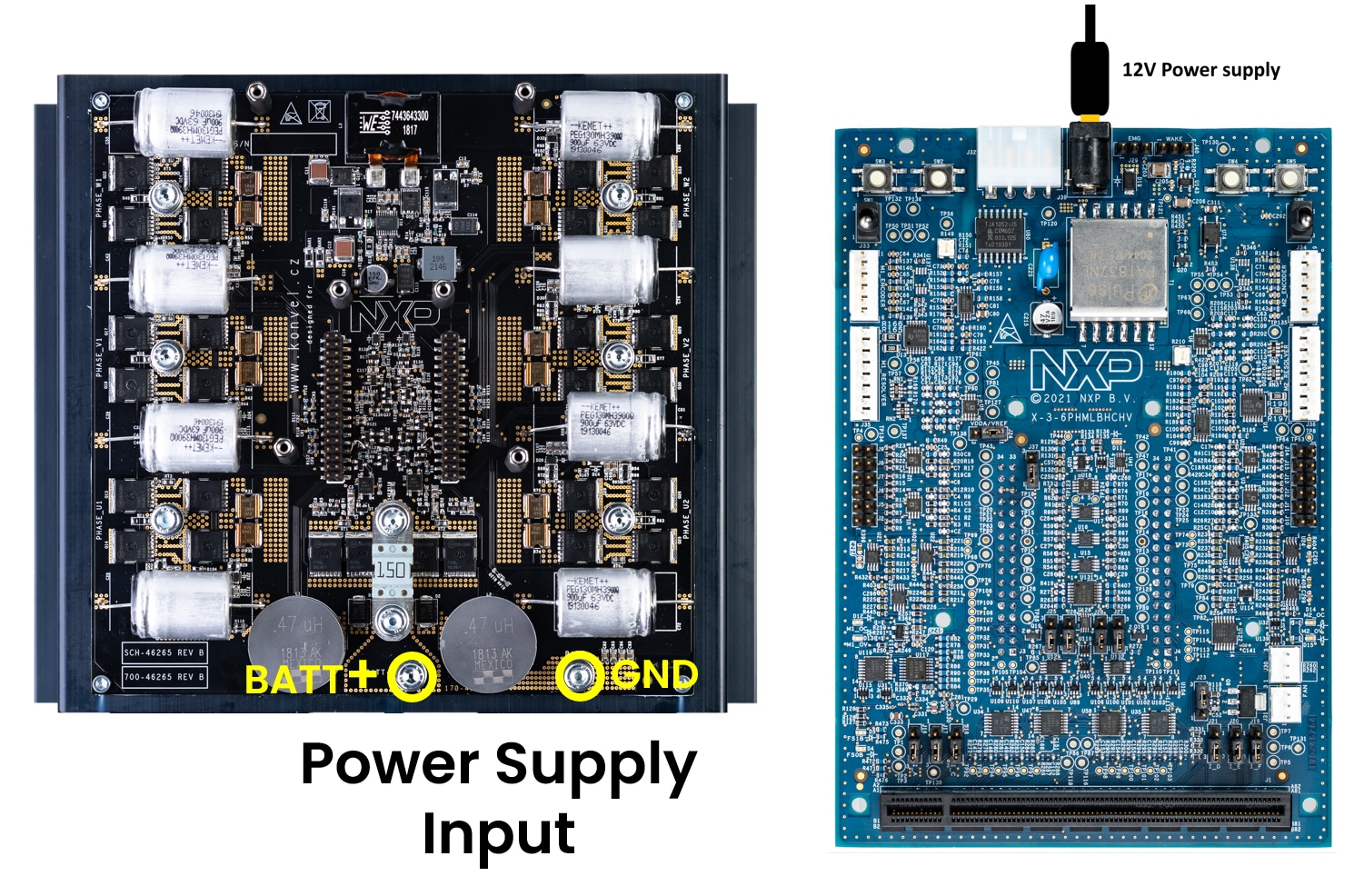
MC_XTM4CK344キットには48 Vのモータや電源は含まれませんが、適切な三相モータと24/48 V電源を使用できます。
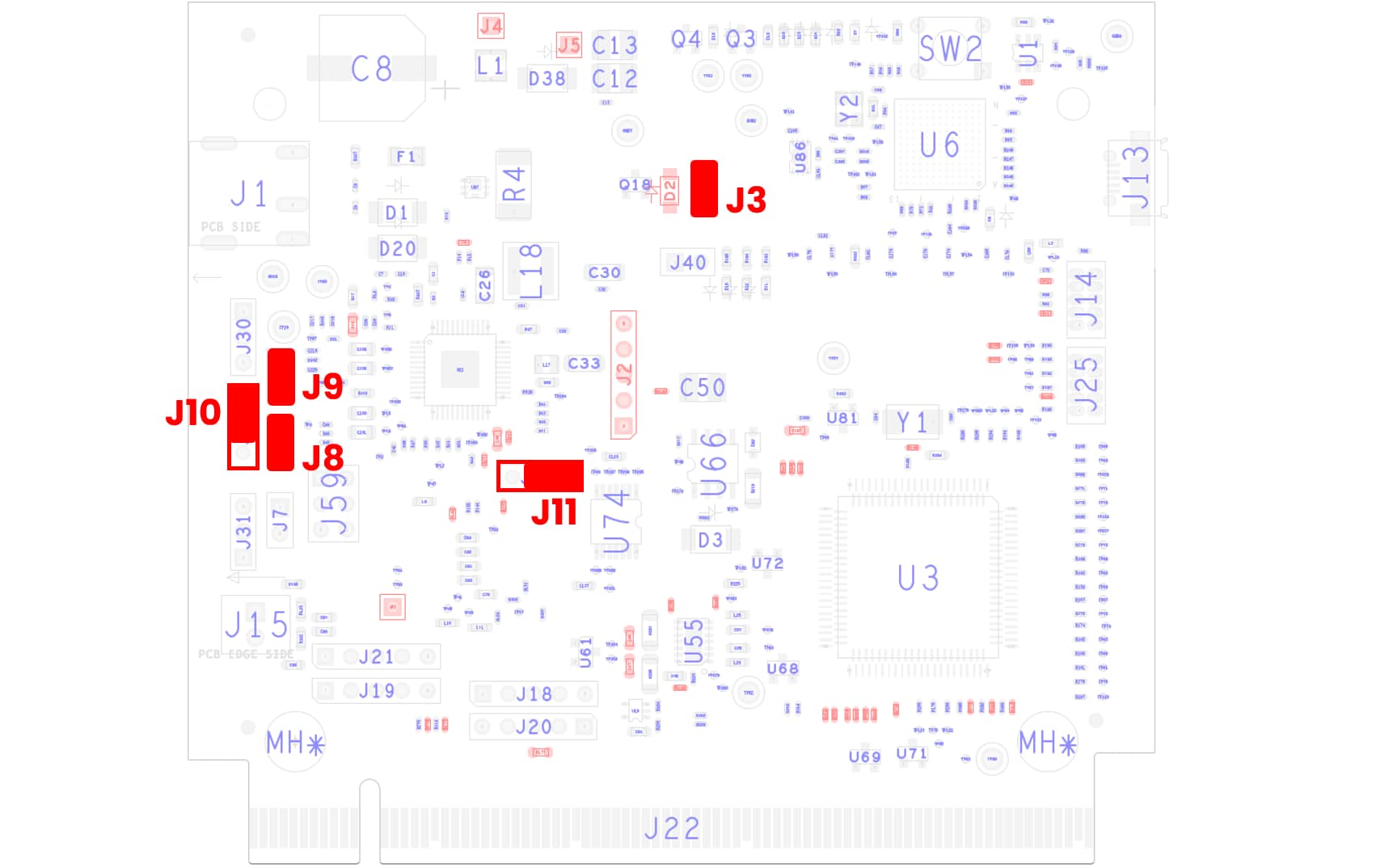
3.1 デフォルトのジャンパ
コントローラ・ボードのデフォルトのジャンパ位置を確認します
| ジャンパ | 状態 | 備考 |
|---|---|---|
J3 |
閉 | OpenSDA 5 Vから接続されたFS26_VDEBUG信号 |
J8 |
閉 | FS26_VLDO1からルーティングされた5 Vパワー・ドメイン |
J9 |
閉 | FS26_VLDO2からルーティングされた3V3パワー・ドメイン |
J10 |
1-2 | FS26_VTRK1からルーティングされたVDDAパワー・ドメイン (5 V) |
J11 |
1-2 | TJA1101 CONFIG0ピン、プルアップ接続 – PHYをマスタとして設定 |
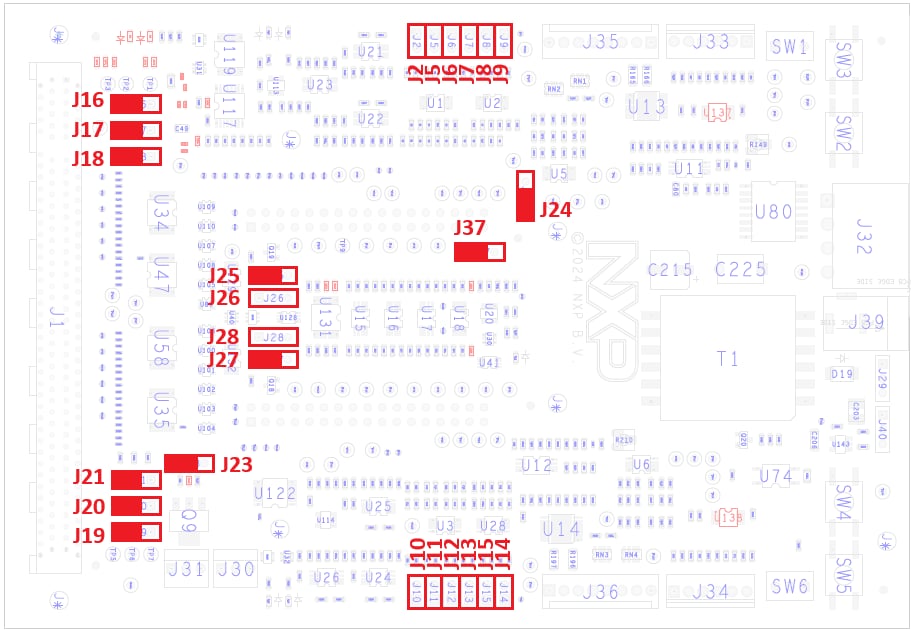
アダプタ・ボードのデフォルトのジャンパ位置を確認します
| ジャンパ | 状態 | 備考 |
|---|---|---|
J2、J5..J9 |
開 | M1電流検知アンプのゲイン = 50(MCSXTM4CK344には適用されません) |
J10..J15 |
開 | M2電流検知アンプのゲイン = 50 |
J16 |
2-3 | M1 FOC構成、AN1信号にルーティングされたI_PHA(MCSXTM4CK344には適用されません) |
J17 |
2-3 | M1 FOC構成、AN3信号にルーティングされたI_PHB(MCSXTM4CK344には適用されません) |
J18 |
2-3 | M1 FOC構成、AN5信号にルーティングされたI_PHC(MCSXTM4CK344には該当しません) |
J19 |
2-3 | M2 FOC構成、AN29信号にルーティングされたI_PHF |
J20 |
2-3 | M2 FOC構成、AN27信号にルーティングされたI_PHE |
J21 |
2-3 | M2 FOC構成、AN25信号にルーティングされたI_PHD |
J23 |
1-2 | MCU制御のファン |
J24 |
1-2 | 過電流および過電圧異常ロジック:VREF由来のリファレンス電圧V-TH |
J25 |
1-2 | 内部HWロジックによるM1安全状態の有効化:安全な開状態(MCSXTM4CK344には適用されません) |
J26 |
開 | 外部ECUによるM1安全状態の有効化:安全な開状態 - 無効(MCSXTM4CK344には適用されません) |
J27 |
1-2 | 内部HWロジックによるM2安全状態の有効化:安全な開状態 |
J28 |
開 | 外部ECUによるM2安全状態の有効化:安全な開状態 - 無効 |
J37 |
1-2 | M1_RESET:モータ1の降圧UVラッチ故障のリセット(MCSXTM4CK344には適用されません) |
| 2-3 | M2_RESET:モータ2の降圧UVラッチ故障のリセット |
3.2 組立キット
ヘッダ・コネクタを使用してアダプタ・ボードをパワー・ステージ・ボードに接続します
取り付け穴 (6) を使って位置を合わせます
プラスチックのネジを使用して、アダプタ・ボードとパワー・ステージ・ボードを固定します
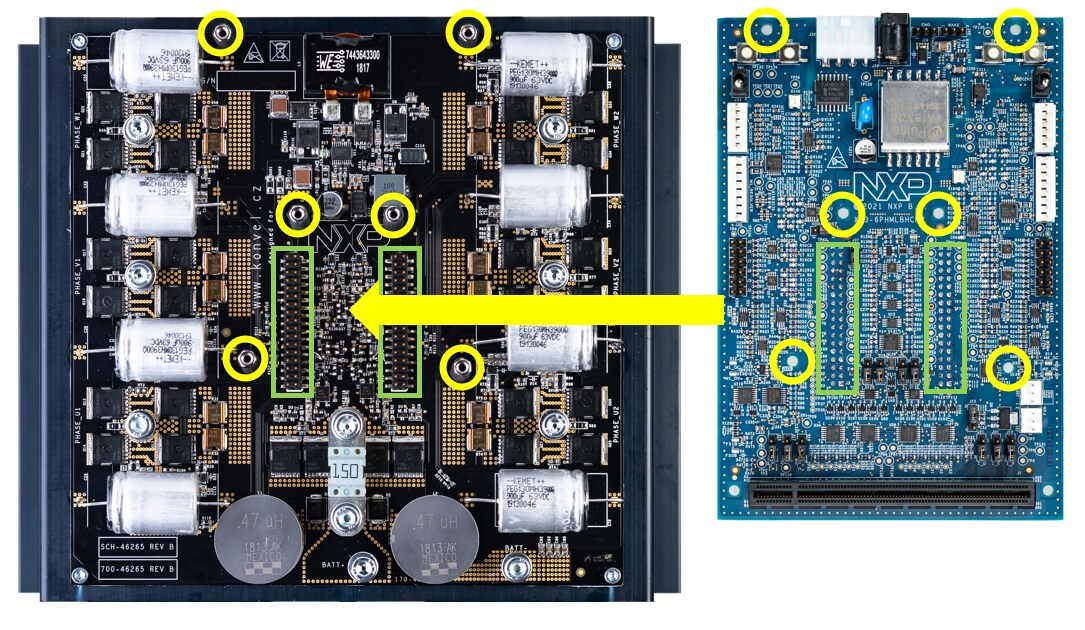
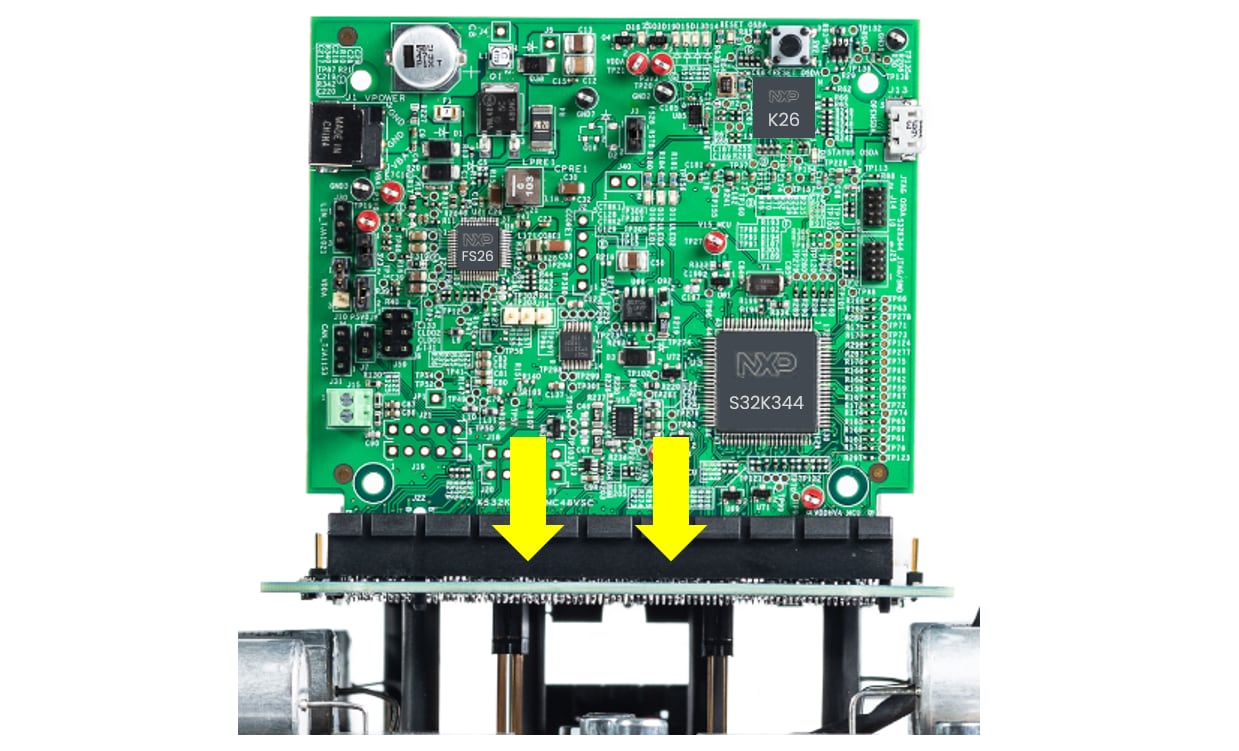
コントローラ・ボードをアダプタ・ボードのPCIeコネクタに挿入します
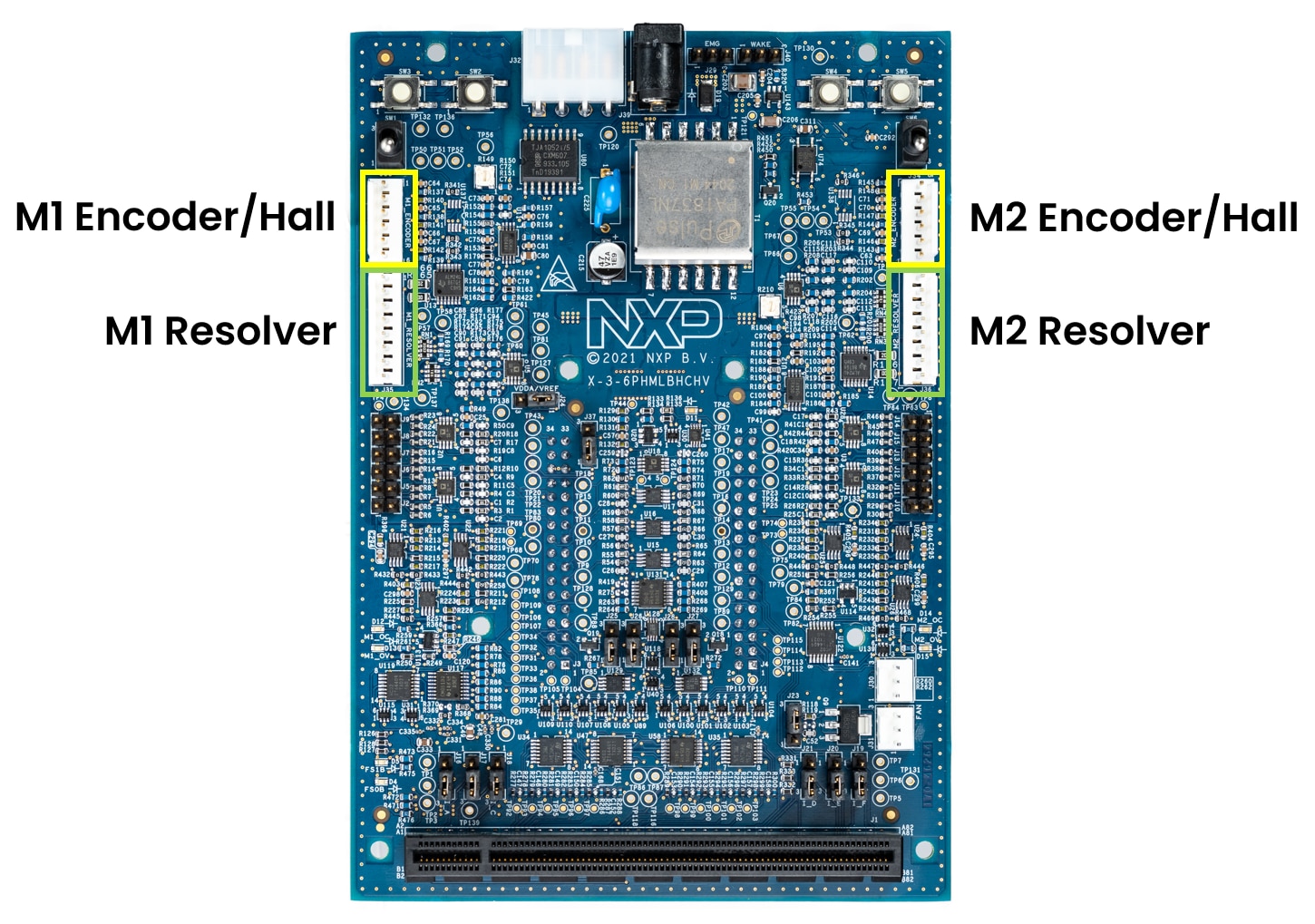
3.3 モータの接続
適切なM4ネジを使用して、モータM2(およびM1)相配線をパワー・ステージ・ボードに接続します
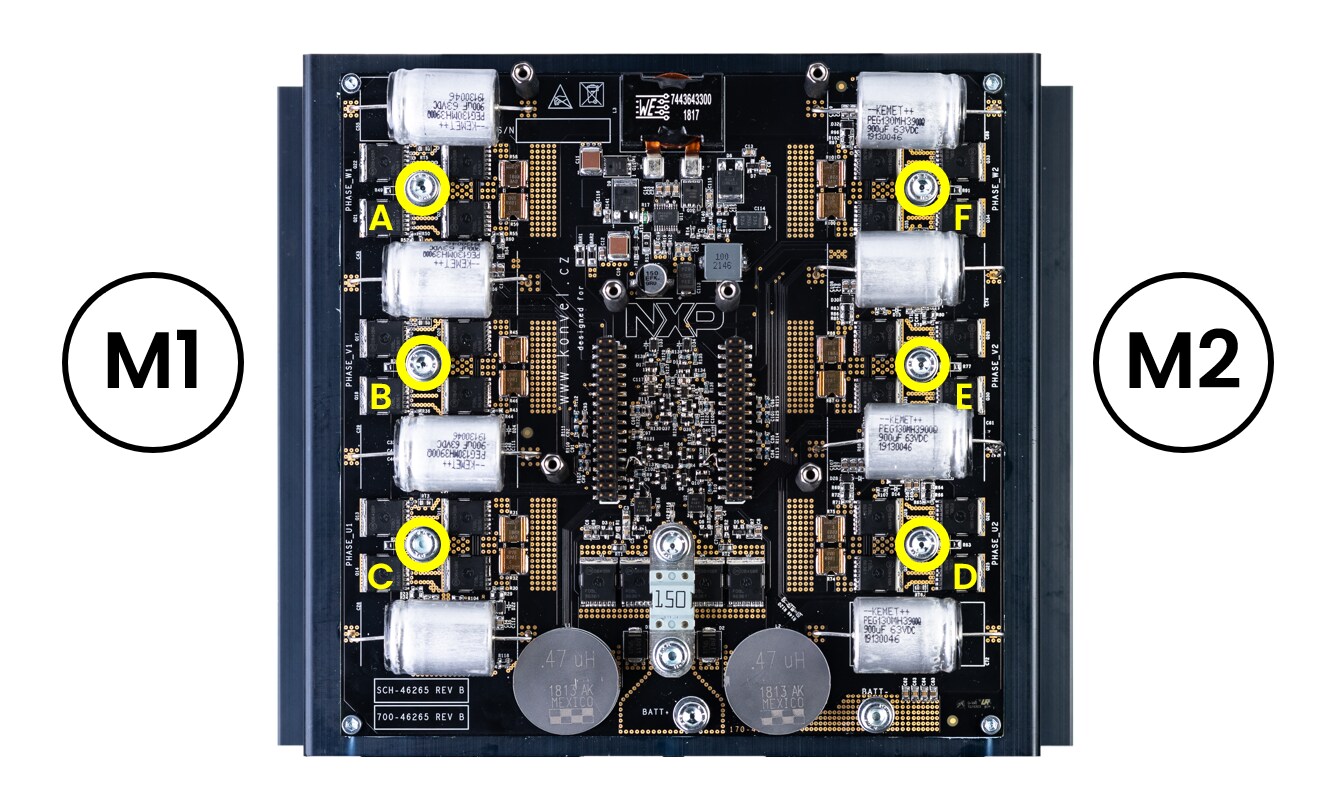
必要に応じてレゾルバまたはエンコーダ/ホール位置センサを接続します(センサ・ベースのソフトウェア・アプリケーションでのみ使用)
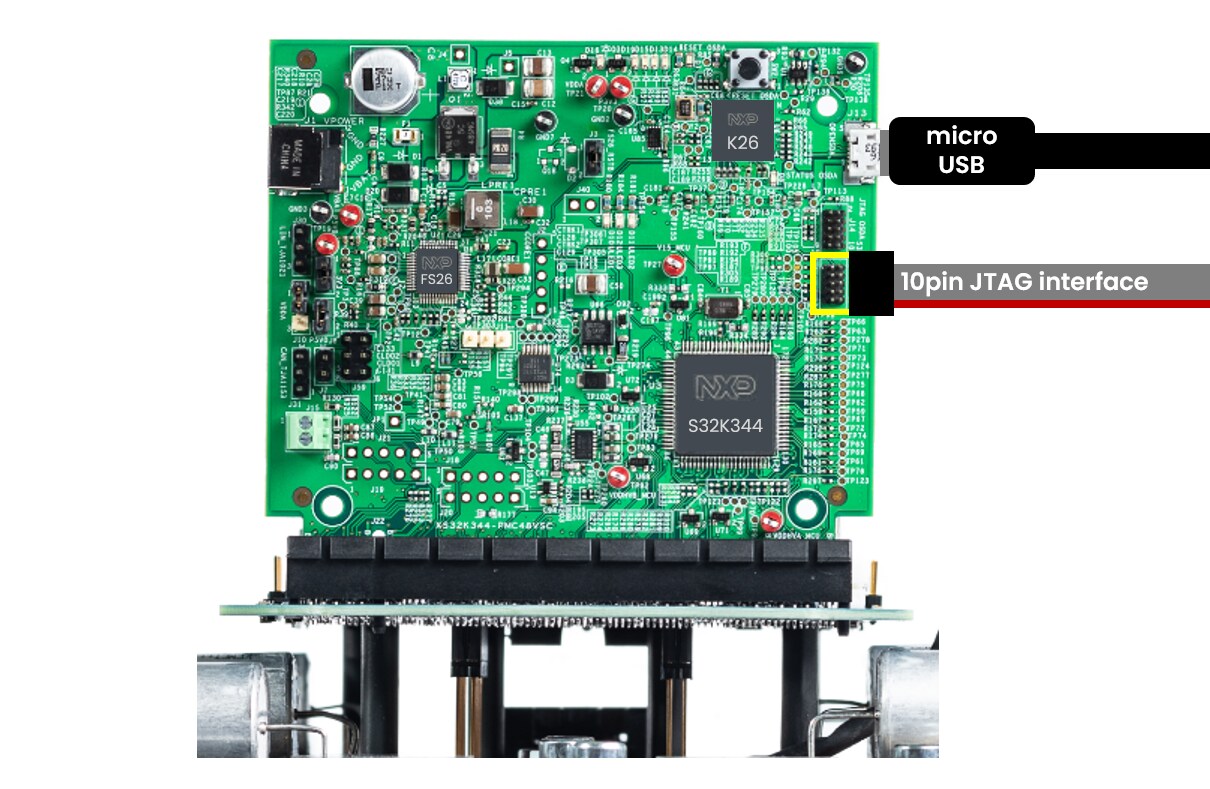
3.4 デバッガの接続
micro USBケーブルをS32K3のオンボード・デバッガに接続するか、デバッグ用の外部10ピンJTAGインターフェースを使用してPCと接続します
4. ビルドと実行
MC_XTM4CK344モータ制御キットの動作テストを行いましょう。
4.1 アプリケーションの選択とプロジェクトのインポート
インストール・ディレクトリで適切なモータ制御アプリケーションを選択します
NXP\MC_DevKits\MC_XTM4CK344\sw
インストールされているアプリケーション・ソフトウェア・プロジェクトをS32 Design Studio IDE for S32 Platformにインポートするには、次の手順に従います。
- S32DS for S32 Platformを起動します
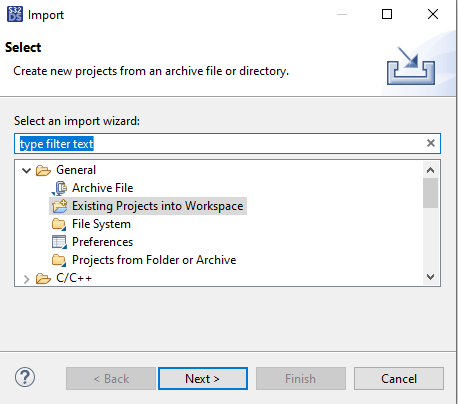
- [File(ファイル)]>[Import(インポート)]に移動し、[General(全般)]>[Existing Projects into Workspace(既存プロジェクトをワークスペースへ)]を選択します
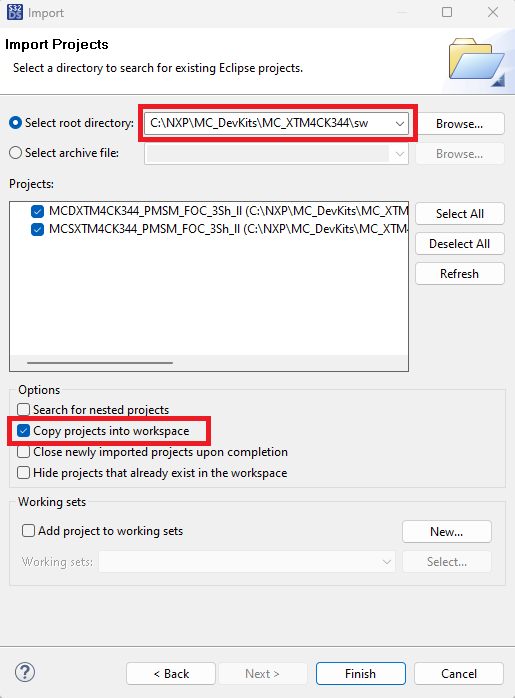
アプリケーションのインストール・ディレクトリ (NXP\MC_DevKits\MC_XTM4CK344\sw) に移動し、適切なプロジェクトを選択して[OK]をクリックし、[Finish(完了)]をクリックします
4.2 設定ツールの使用
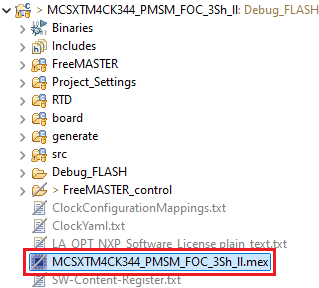
*.mexファイルをダブルクリックして下位レベルのドライバが含まれるプロジェクトの構造を展開し、設定ツールのプロジェクト設定を開きます
適切なプロジェクトを設定していることを確認し、[Update Code(コードの更新)]ボタンをクリックして設定ファイルを生成します

4.3 ソフトウェアのアップロードとデバッグ
S32DSで、C/C++の画面に戻ります
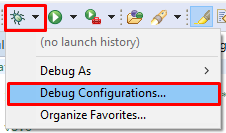
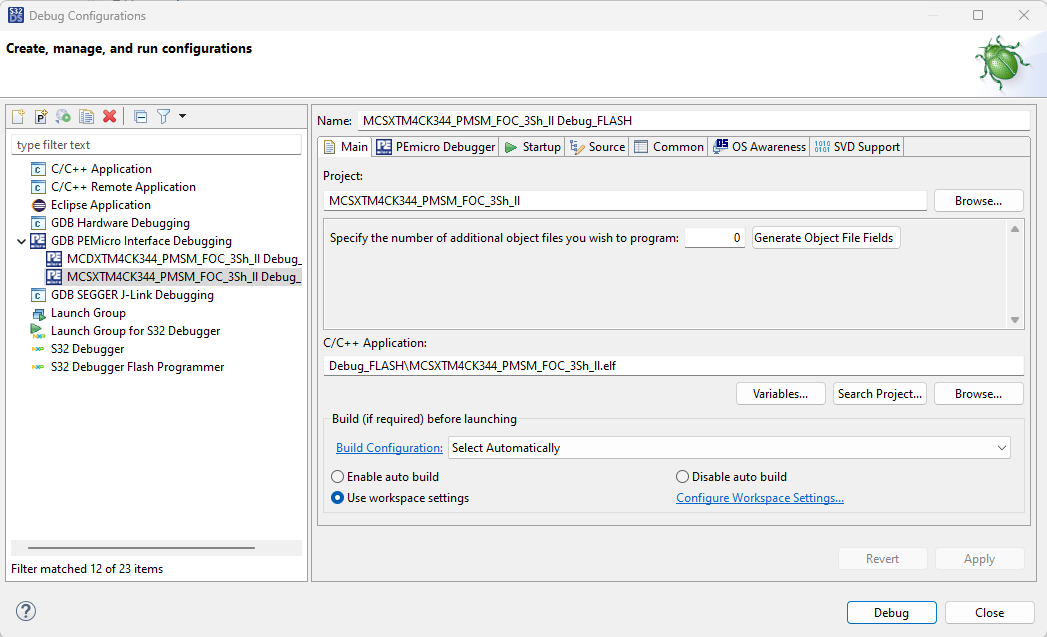
[Debug Configuration(デバッグ設定)]メニューに移動し、ソフトウェアをビルドしてマイクロコントローラ・ユニット (MCU) にアップロードするための定義済みデバッグ設定を選択します
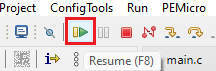
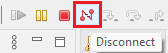
S32DSがデバッグ画面に切り替わるので、[Resume(再開)]をクリックして(またはF8を押して)コードを実行し、[Disconnect(切断)]を選択してS32DS IDEデバッガとFreeMASTERツール間の干渉を回避します
4.4 デバッグ・ツールの設定
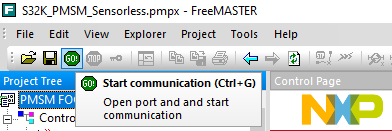
FreeMASTERアプリケーションを起動します
*.pmpx FreeMASTERプロジェクト
FreeMASTERアプリケーションを起動します

通信を有効にするには、FreeMASTERツールバーで[Go(実行)]をクリックします(またはCtrl+Gを押します)
通信が成功すると、下部のステータス・バーに次のように表示されます。
「RS-232 UART Communication;COMn;speed = 115200」
アプリケーション制御
MC_XTM4CK344モータ制御ボードの動作テストを行いましょう。
モータ・パラメータ
これで、接続されているBLDC/PMSMモータに合わせてモータ・パラメータを編集できます。モータ制御アプリケーション・チューニング (MCAT) ツールの[Parameters(パラメータ)]タブを開き、左側の値を編集します。
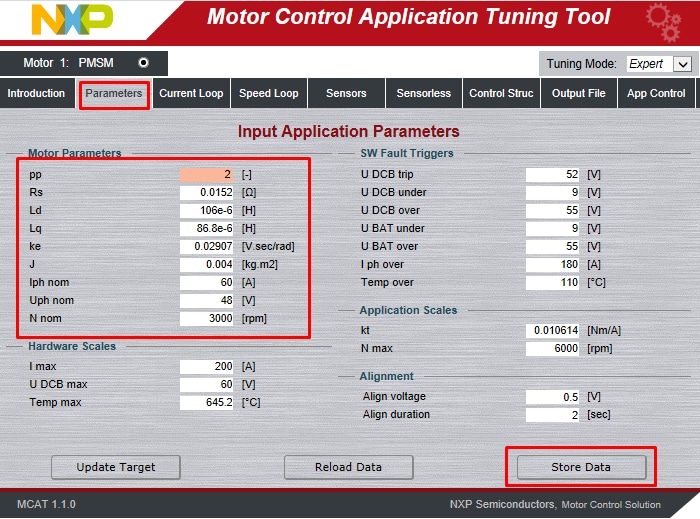
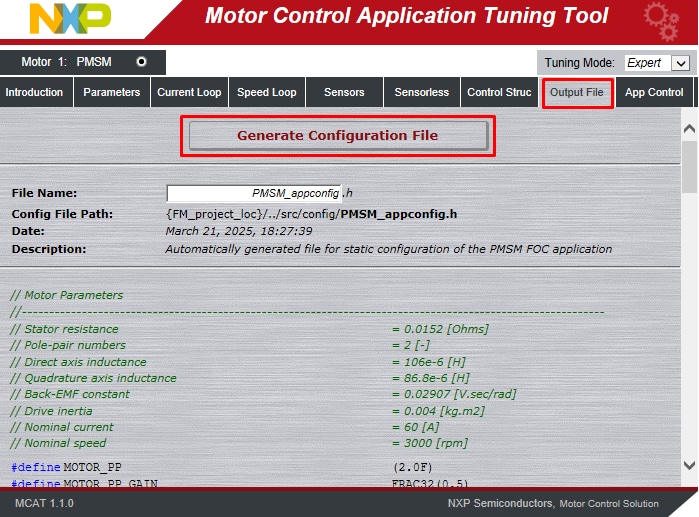
完了したら[Store Data(データを保存)]をクリックし、[Output File(出力ファイル)]タブに切り替えて、[Generate static configuration file(静的設定ファイルを生成)]をクリックします。
手順4.3を再度実行し、プロジェクトをビルドしてコードをMCUにアップロードします。
モータを回転させる
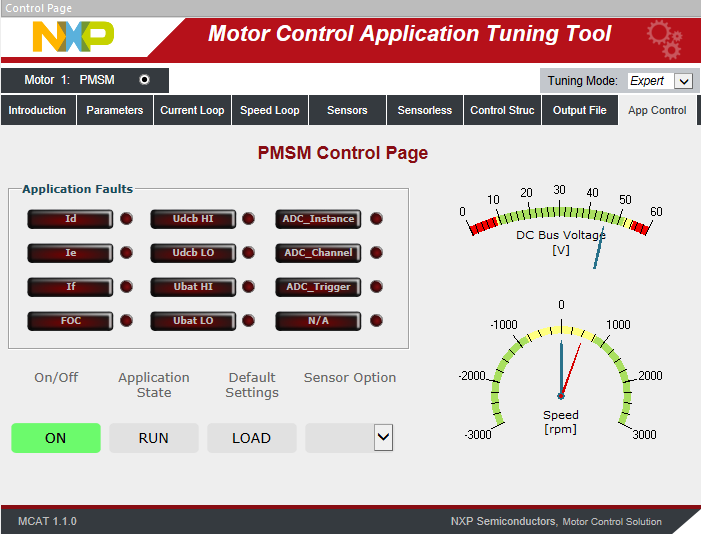
モータ制御アプリケーション・チューニング (MCAT) ツールのメニューで[App Control(アプリケーション制御)]タブをクリックして、アプリケーション制御ページを表示します。
モータの回転数を設定し、モータ・ドライブをオンにします。
保留中の障害の確認
保留中の障害(障害状態 - LED点滅)がある場合は、FreeMASTER MCATの制御ページで[Clear FAULT(障害をクリア)]をクリックするか、アダプタ・ボードのSW4とSW5(M2の場合)(M1の場合はSW2とSW3)を同時に長押しします。
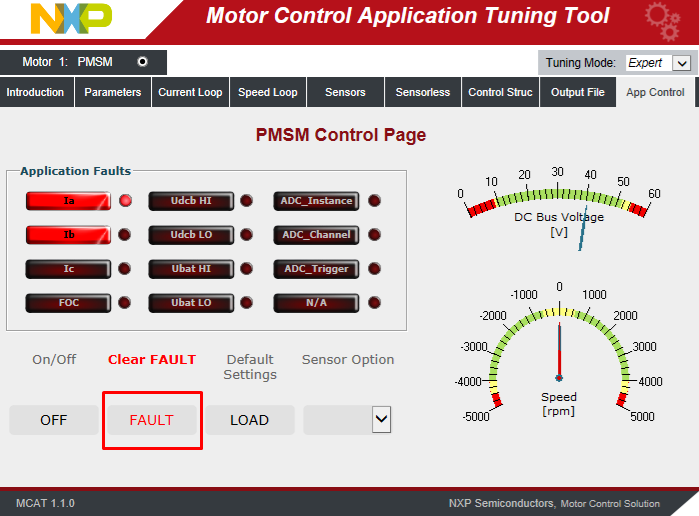
アプリケーションの起動
制御ページで[ON/OFF]をクリックするか、ボードのSW4/SW5を押すかSW6を切り換えると(M2の場合)(M1の場合はSW2/SW3を押すかSW1を切り換え)、ロータの時計回り/反時計回りの回転が開始されます。点灯し続けるLEDが駆動中であることを表します。速度を設定します。
速度を設定するには、Speed Required変数を変更します。[Variable Watch(変数監視)]ウィンドウを開き、Speed Required変数を変更するか、スピード・ゲージをクリックするか、SW4/SW5 (SW2/SW3) スイッチを押します。
アプリケーションの停止
アプリケーションを停止するには、FreeMASTER MCATの制御ページで[ON/OFF]ボタンをクリックするか、アダプタ・ボードのSW6(M1の場合はSW1)を切り換えます。準備状態になると、LEDが消灯します。
設計・リソース
ボード・アセット
アプリケーションに関するドキュメント
ソフトウェア
- MC-XTM4CK344開発キット・アプリケーション・ソフトウェア
- S32K3標準ソフトウェア
- S32K3リファレンス・ソフトウェア
- S32 Design Studio IDE
- リアルタイム・ドライバ (RTD)
- S32K消費電力計算ツール (PET)
- モデルベース設計ツールボックス (MBDT)
- 構造コア・セルフテスト (SCST) ライブラリ
- FreeMASTERランタイム・デバッグ・ツール
- プラットフォーム間通信フレームワーク (IPCF)
- 車載用演算/モータ制御ライブラリ (AMMCLib)
- S32セーフティ・ソフトウェア・フレームワーク (SAF) およびセーフティ・ペリフェラル・ドライバ (SPD)
サポート
フォーラム
NXPのいずれかのコミュニティ・サイトで、他のエンジニアとつながり、MCSXTM4CK344/MCDXTM4CK344を使用した設計に関する専門的なアドバイスを受けることができます。