自動車の自動運転や運転者支援システムは、レーダー(RAdio Detection And Ranging:RADAR)、LiDAR (LIght Detection And Ranging)、カメラ、V2X (Vehicle-to-everything) 通信のそれぞれのテクノロジをバランスよく組み合わせることに依存しています。これらのテクノロジは、同じ機能を有していることも多くありますが、それぞれに独自の強みと限界があります。
レーダーは数十年にわたって車載機器に使用されており、対象物の速度や距離、角度を検出します。
他のセンサ・テクノロジと比べて計算負荷が軽く、ほぼすべての環境条件で動作します。
レーダー・センサは検知距離範囲によって分類されており、0.2~30 mは近距離レーダー (SRR)、30~80 mは中距離レーダー (MRR)、80 m~200 m以上は長距離レーダー (LRR) となります。
長距離レーダー (LRR) は、適応走行制御 (ACC) や衝突被害軽減ブレーキ・システム (AEBS) において、事実上の標準として使用されているセンサです。現時点では、LRRのみを使用して実装されたACCおよびAEBSシステムには限界があり、車の割り込み時や、車線内でオートバイが千鳥走行をしているような幅の狭い対象物の検出、カーブした道路での誤った車両に基づく距離の認識など、特定の条件において適切に反応しない場合があります。これらの例のような限界を克服するために、レーダー・センサと車内のカメラ・センサを併用することで、検出のためのさらなるコンテキストを得ることができます。
LiDARセンサは、パルス光が対象物に到達してからセンサに戻るまでの時間を計算することで、対象物までの距離を測定します。
車両のルーフに設置されたLiDARは、周囲360°を見渡し、車両が回避すべき障害物の3Dビューを提供することが可能です。この能力により、LiDARは2007年のDARPA Autonomous Driving Challengeという競技会以降、自動運転の寵児として脚光を浴びています。
それ以来、LiDARセンサは大幅な小型化とコスト削減を実現しましたが、より広く普及している認められたモデルの一部は、依然としてレーダー・センサやカメラ・センサよりもはるかに高額であり、搭載されている車両の価格を上回るものさえあります。
車載システムのLiDARは一般的に、視野が制限されている場合でも、905 nmの波長を用いて最大200 mの範囲を検出できます。現在では、より長距離で高精度の1550 nm LiDARを販売している企業もあります。
LiDARでは、周囲光の影響を取り除き、他のLiDARからのかく乱を防ぐために、光学フィルタが必要である点に留意することが重要です。また、使用されるレーザー・テクノロジが「目にやさしい」ものでなければならないことにも注意が必要です。最近では、レーザーとレシーバのアセンブリを物理的に回転させ、最大360°の領域のデータを収集するメカニカル・スキャンLiDARに代わって、ソリッド・ステートLiDAR (SSL) へと移行しています。SSLは可動部を持たないことから、特に自動車環境において長期的により高い信頼性を確保できます。現時点では、SSLは視野 (FOV) の範囲が限定されていますが、低コストであるため、複数のセンサを利用することでより広い範囲をカバーすることができます。
カメラ:LiDARやレーダーとは異なり、ほとんどの車載カメラはパッシブ・システムです。
カメラ・センサのテクノロジおよび解像度は、その能力において非常に大きな意味を持ちます。カメラは人間の目に似て、悪天候や照度の変化の影響を受けやすいです。しかし、カメラは、テクスチャ、色、コントラストなどの情報をキャプチャできる唯一のセンサ・テクノロジであり、カメラによってキャプチャされる高レベルのディテールにより、分類のための主要テクノロジとなっています。これらの特徴は、画像解像度の向上や低価格帯と相まって、カメラ・センサをADASおよび自律型システムにとって不可欠なものにしています。
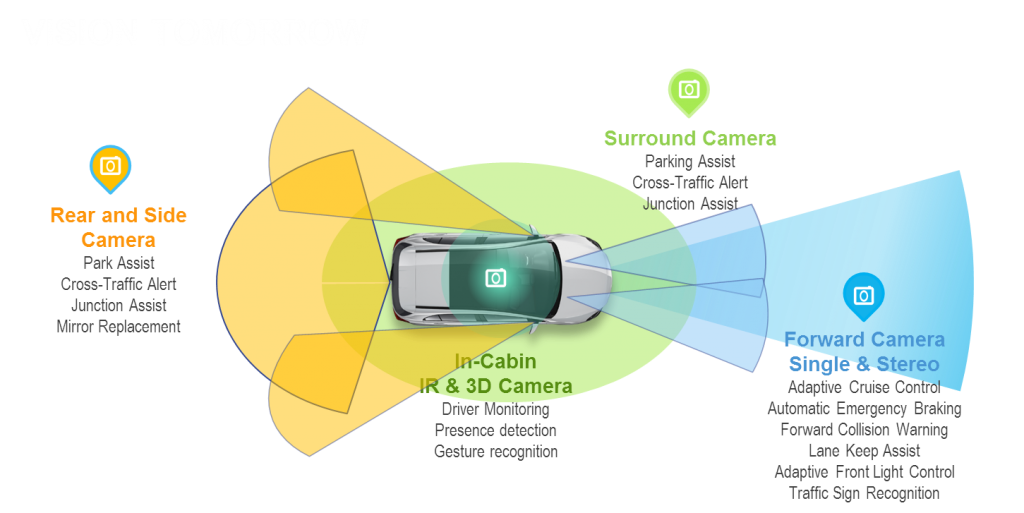
以下に、カメラによって実現されるADASアプリケーション・レベルの進化の例を示します。
- 適応走行制御 (ACC):現在のものは、自動車やトラックなどの全幅車両を継続的に検出します。オートバイを分類し、車間距離を維持できるようになる必要があります。
- 自動ハイビーム制御 (AHBC):現在のものは、ハイビームとロービームの切り替えを行っています。対向車を検出し、それに応じて照射範囲を調整するように進化する必要があります。
- 交通標識認識システム (TSR):現在のシステムは、制限速度やさまざまな標識のサブセットを認識します。これからのシステムでは、補足的な標識やコンテキスト(午前10時から午後8時までの速度制限など)を認識し、交通信号を検出してACCの適応、停止、減速などができるようになる必要があります。
- レーン・キープ・システム (LKS):現在のものは、車線を検出しています。これからのシステムは、走行可能領域を検出し、工事標識や2車線以上に対応できるようになる必要があります。
車内では、安全性のためのドライバーの監視や乗員の検知に加え、ジェスチャ認識やタッチレス制御の導入も進んでいます。ジェスチャ認識には、視線追跡に基づくコンテキストの追加も行われています。また、自動運転システムの場合、ドライバーの監視には、必要に応じてドライバーが再度運転を引き継ぐ準備ができているか確認するという別の用途もあります。
V2X:目に「見える」ものを拡張します。
真の自動運転には、センサ・ベースのレーダー、LiDAR、およびカメラ・テクノロジに加えて、車両がマルチエージェントのリアルタイム環境で通信できることが必要となります。そこで、V2X (Vehicle-to-everything) 通信の出番です。V2Xは、近くにあるものだけでなく、カーブの周辺や別の車両の周辺、さらには混雑した都市環境や1マイル離れた場所であっても、「見る」ことを可能にします。V2X (Vehicle-to-everything) 通信により、たとえ見通し線上にない場合であっても、車が他の車やオートバイ、救急車両、信号機、デジタル道路標識、歩行者と「会話」できるようになります。
V2Xに対応した複数の物体が範囲内に入ると、アドホックなワイヤレス・ネットワークが形成され、特定のセーフティ・クリティカルな短いメッセージを自動かつリアルタイムで相互に送受信できるようになります。
これら4つのテクノロジにはいずれも、それぞれの強みがあります。
道路での安全を確保するには、使用されているセンサ・テクノロジに冗長性が必要です。カメラ・システムは最も多くの用途に対応し、色やテクスチャなどの情報を提供することから、車載カメラ・センサの出荷台数は2030年までに4億台近くに到達し、最も大きく増加することが見込まれています。LiDARは価格が低下していますが、同様にレーダー・システムも低価格化が進んでいます。これら両方のテクノロジも高い成長率が見込まれ、販売台数は2030年までに4,000~5,000万台に達すると予測されます。
NXPは、車載半導体および先進運転者支援システム (ADAS) の分野を率いる企業として、自動運転車のイノベーションを推進する幅広いレーダー・センシングおよびプロセッシング、ビジョン・プロセッシング、セキュアV2X、センサ・フュージョン・テクノロジのポートフォリオを提供しています。詳細については、NXPのウェブサイトをご覧ください。