カメラ、LiDAR、IMUがロボットの目と内耳であるなら、精密なアナログ測定はロボットの「自意識」、つまり機械が実際にどのように動作しているかを示す電流、ひずみ、温度などの静かな認識を提供します。
この認識を可能にするコンポーネントの1つであるNAFEB43388は、堅牢なマルチチャネル・アナログ・フロントエンド (AFE) として際立つ製品です。最大±25 Vの8つの設定可能な入力、24ビットのデルタシグマADC、内蔵PGA、抵抗センサ用の励起源、非常に堅固なEMCおよび誤配線保護を備え、そのすべてが産業グレードの精度とレジリエンスを確保できるよう特別に設計されています。
これはカメラではなく、LiDARでもなく、SLAM(自己位置特定とマッピングの同時実行)も実行しません。しかし、自律走行搬送ロボット (AMR) やヒューマノイドが、電気的に厳しい動作状況の中でも、力、ひずみ、電流、温度を高い忠実度で測定する必要がある場合には、NAFEB43388が驚くほど戦略的な構成要素となります。
デバイスの概要、重要である理由
- 8つのアナログ入力(シングルエンドまたは差動):電圧、電流、抵抗、RTD、熱電対用に設定可能
- ±25 Vの入力範囲、最大±36 Vの過電圧保護
- 24ビットのデルタシグマADC、PGA(×1~×64)、内蔵の電圧/電流励起源、低ドリフト・リファレンス
- データ・レート:7.5 SPS → 288 kSPS、約72 kSPSで17ビットのENOB、SPIインターフェース
- EMC耐性を強化した入力、診断機能、CRC、広い温度範囲(−40°C~+125°C)、6 mm x 6 mmの40ピンHVQFN
手短に言えば、これは組込みシステム用に小型化された産業用DAQフロントエンドです。静かで連続的な測定に最適であり、ロボットの寿命の延長、よりスマートな搬送、より安全な移動のために役立ちます。
よりスマートなエッジ・センシングを設計。NAFEB43388を使用して、より信頼性の高いロボットや産業用システムを構築しましょう。
自律走行搬送ロボット:重要な場面での正確さ
決して過負荷にならないフォークリフトAMR
状況:倉庫用のAMRがパレットを引き込み、リフトが上昇します。動き出す前に、AMRはリフト・キャリッジの周りに埋め込まれた4つのロードセルをチェックします。
NAFEB43388の使用:ロードセルやひずみゲージはブリッジ・センサであり、低雑音、安定した励起、注意深いゲイン設定を必要とします。NAFEB43388は、正確な励起とプログラマブルなゲインを提供し、24ビットの分解能でデジタル化することにより、負荷のわずかな変化を検出可能にします(「ボックス#17が少し中心から外れて積み重ねられている」など)。8つのチャネルがプラットフォームまたはマスト全体にわたるマルチポイント・センシングを実現し、総ペイロードと負荷分散の両方を検知してバランスと安全性を確保します。
メリット:荷崩れの減少。推測ではなく実際の質量を考慮した、よりスマートな経路と速度のプロファイル。
 フォークリフトAMRが搬送前にペイロードを検証し、ロードセルのセンシングによって持ち上げ力を実用的な安全性データに変換。
フォークリフトAMRが搬送前にペイロードを検証し、ロードセルのセンシングによって持ち上げ力を実用的な安全性データに変換。
早期の警告:ベアリング、ブレーキ、バッテリーの健全性
状況:AMRが何か月もの間、うなり音を発しています。クラウド・ダッシュボードには、同じ速度/負荷でモータ位相電流にわずかな増加が見られ、ホイール・ギヤボックス付近の微妙な温度上昇とも相関があるという傾向が示されています。
NAFEB43388の使用:シャントベースの電流、RTD、熱電対、バス電圧など精度の高い測定値を多重化することで、電気信号と熱信号を単一の健全性スコアへと融合できます。72 kSPSで17ビットのENOBにより、ドリフトのない検知のために必要なDC精度を維持しながら、診断用に十分な速さでデータを収集します。堅牢な入力保護により、EMIノイズの多い産業環境でも信頼性の高い動作を確保します。
メリット:計画的なダウンタイムによって想定外の故障を防ぎ、状況に基づくメンテナンスが可能になります。
過酷な床、邪魔になるケーブル
工場や倉庫は電線に優しくありません。誤配線やホットスワップによる事故、サージなどが発生します。NAFEB43388は±36 Vの過電圧耐性を備え、ESDやサージに対しても堅牢であるため、一般的なAFEやMCUのADCピンなどと比べて問題の起こるリスクが低くなります。その結果、故障が減少し、機械、電気、ファームウェアなど異なるチーム間での責任転嫁も少なくなります。
ヒューマノイド:見るだけではなく、世界を感じる
地面を読み取る足
状況:ヒューマノイドが平坦でない格子の上に立っています。カメラとIMUによって現在どこにいるかは認識できますが、バランスを取るには各足を通した重量の流れについて把握することが求められます。
NAFEB43388の使用:足の多軸フォーストルク・センサと分散ロードセルで、同期された低ノイズの測定を実現します。NAFEB43388は、注意深いチャネル構成と共有された励起によって、ゼロ・モーメント・ポイント (ZMP) 制御とプッシュ・リカバリー(押された状態からの回復)のために不可欠な、繊細な荷重移動検出を可能にします。この領域では多くの場合、レートが数kHzを超えるときに精度が重要となりますが、100~500 Hzの範囲の制御ループではデルタシグマのレイテンシが許容されます。
 ヒューマノイドの足圧力センシングでは、分散負荷測定を使用して、バランス制御と早期の故障検出をサポートします。
ヒューマノイドの足圧力センシングでは、分散負荷測定を使用して、バランス制御と早期の故障検出をサポートします。
信頼できるが限界もあるトルク
状況:ロボットの関節に、ひずみ要素を持つ直列弾性アクチュエータ(Series Elastic Actuator:SEA)を使用しています。インピーダンス制御のために精密なトルクが必要です。
適性:NAFEB43388の24ビットADC、PGA、および励起は、ひずみゲージに適しています。ただし、内部のモータ電流ループ(5~20 kHz)については別です。デルタシグマ変換のレイテンシは、それに適した設計にはなっていません。モータ・ドライバの高速SAR ADCまたは電流制御用の統合シャント・センスを組み合わせて、NAFEB43388は外側のインピーダンス・ループや安全ループのために使用します。
静かな監視:熱、電圧、構造的ひずみ
ヒューマノイドは出力密度の高い機械です。モータのエンドベルにRTDを、インバーター上に熱電対を、荷重支持部材に箔ひずみゲージをそれぞれ埋め込むことで、層間剥離や絶縁破壊が発生する前に早期の警告を発することができます。NAFEB43388の較正ソースと診断機能は、アナログ補助ボードを設計に追加することなく、これらの警告を実用的なテレメトリに変換するのに役立ちます。
概念図:スタック内での位置付け
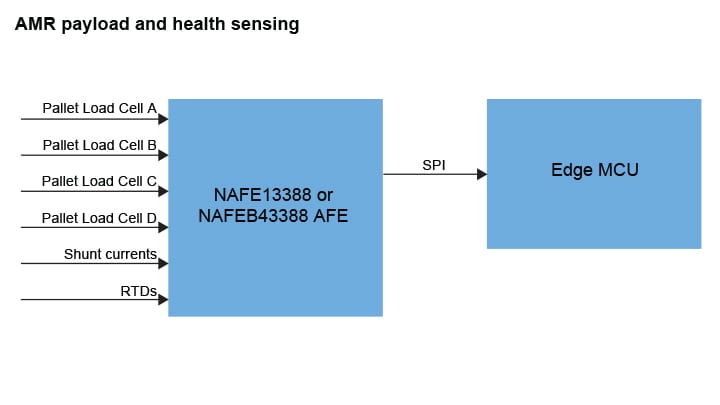 AMRのペイロードおよびヘルス・センシングのブロック図。
AMRのペイロードおよびヘルス・センシングのブロック図。
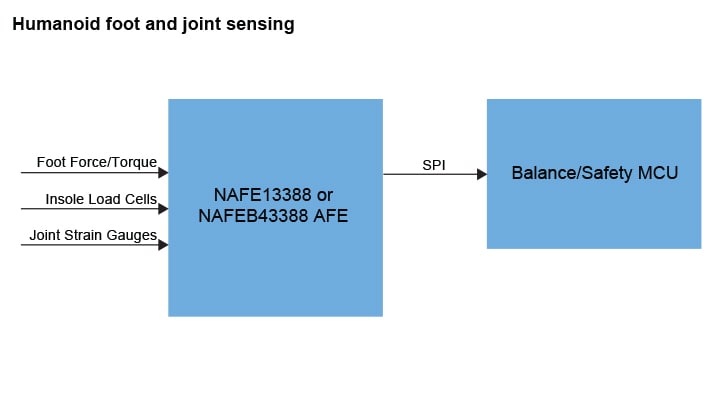 ヒューマノイドの足および関節センシングのブロック図。
ヒューマノイドの足および関節センシングのブロック図。
適切でない場面、代わりに何を使用するか
- LiDAR、カメラ、レーダー、IMUを使用したSLAMと認識は、デジタルの高帯域ドメインで行われるため、AFEによる付加価値はない
- 内部のモータ電流ループには、高速ADC(多くの場合はSAR)と絶縁型シャント・アンプを備えたモータ・ドライバを使用し、外側のループと診断用にデルタシグマAFEを保持
- 数百個から数千個のタクセル(触覚ピクセル)を備えた大型の触覚スキンには、8チャネルの高精度AFEの代わりに、アレイに最適化されたICまたはマトリックス・スキャン・ソリューションが必要
これらの制限は、NAFEB43388の変換モデルとチャネル数、そして高スループットのタスク向けではなく正確さに強みを持つという特性によるものです。
設計ノート:NAFEB43388を最大限に活用
適切なデータ・レートの選択
制御ループでの力、トルク、RTDのセンシングについては、500 Hz以下の有効帯域幅が一般的です。NAFEB43388は、7.5 SPS~288 kSPSの幅広いデータ・レート設定をサポートし、レイテンシとENOBのバランスを取りながら、フィルタと制御ループに必要な値を正確に選択できます。
内蔵された励起源の利用
ブリッジ・センサには安定した励起が必要です。AFEの内蔵ソースを使用すると、アドホック・ドライバの場合と比較してBOMが削減され、PCB領域を節約でき、ゲインとオフセットのドリフトも最小限に抑えられます。また、デバイスの内部リファレンスによってフィールド較正が簡素化されます。
SPI帯域幅のバジェット
8つのチャネルが高いレートで動作します。MCU上でSPIクロック、DMA、バッファリングを計画し、複数ポイントでの力の測定値に対して時間同期されたサンプリングを使用することで、適切なバランスおよびペイロード推定を維持します。
耐久性を優先
このデバイスの特徴の1つは、堅牢なフロントエンド保護(ESD、サージ、誤配線)です。沿面距離/空間距離を考慮して高電圧アナログ・ピンを配線し、ノイズの多いパワー・ステージを物理的に隔離します。それにより、実際の工場や倉庫でデータシート・レベルの精度を維持することができます。
迅速な評価
NXPは、電圧/電流/RTD/熱電対の各モードを迅速に調査できるようにNAFEB43388 EVK Arduinoシールド評価ボードおよびサンプル・ファームウェアを提供し、アナログ回路図を常時目にするわけではないロボティクス・チームの負担を軽減します。
2台のロボットの物語 – ミニ・ケース・スタディ
「ウェイト・スマート」なAMR
ロジスティクス用AMRで不可解なホイール・スリップ・エラーが発生していました。エンジニアは、4つのロードセルを備えたリフト・デッキにNAFEB43388を実装し、リアルタイムのペイロード質量と重心の推定を可能にしました。ナビゲーション・スタックでは、実際の質量と重心オフセットに基づいて速度と回転数を制限するようになりました。結果:1か月でスリップの発生が40%減少し、タイヤの摩耗も軽減されました。AFEの±25 VのレンジとEMCに対する堅牢性により、電気的に過酷なフォークリフト・ベイの問題に再設計なしで対処できました。
より確実に足を運ぶヒューマノイド
二足歩行の研究用プラットフォームが、格子状の床でつま先を離すときに不安定になっていました。足の前方部に分散ロードセルを追加し、NAFEB43388でそれらをルーティングしながら同期測定を行うことにより、コントローラが微小な横方向の荷重移動を検出し、ミッドスタンスでの足首インピーダンスを調整できるようにしました。200 Hzでのデルタシグマ・レイテンシは許容範囲であり、内部較正リファレンスによって、搭載するパワー・エレクトロニクス機器付近の熱スイングに対しても精度を維持することができました。
簡単な比較:設計に対してAFEが過剰かどうか
| 必要なもの |
NAFEB43388の適性 |
理由 |
| ペイロード/ロードセルの精度 |
非常に適している |
ブリッジ・センサ + 励起 + 24ビット精度 |
| バッテリーおよび熱診断 |
非常に適している |
混合電圧/RTD/熱電対のサポート |
| 足の力とバランス(ヒューマノイド) |
適している |
高いENOB、同期されたマルチポイント・センシング |
| 内部のモータ電流ループ |
適さない |
デルタシグマ・レイテンシ、SAR/ドライバADCを使用 |
| ビジョン/SLAMセンサ |
該当しない |
デジタル、高スループット・ドメイン |
| 超低コストのボット |
過剰 |
通常はMCU ADCで十分 |
静かなスペシャリスト:ロボットの誠実さを保つ高精度センシング
NAFEB43388は、ナビゲーション・スタックの主役ではありませんが、ロボットの誠実さ、安全性、高耐久性を保つ静かなスペシャリストです。AMRでは、ペイロードの精度と、状況に基づくメンテナンスをサポートします。ヒューマノイドでは、力とトルクの認識、バランスの保持、健全性の監視を可能にします(ただし、kHzレートのモータ・ループ内への配置には適していません)。精度、堅牢性、設定可能性が重要な場面で使用できます。適切なドライバ・エレクトロニクスや制御アーキテクチャと組み合わせることで、ロボットはより適切にものを見るだけでなく、より完全に自分自身を感じ、理解できるようになります。

