MCTPTX1AK324のスタート・ガイド
このドキュメントの内容
-
パッケージの内容
-
ソフトウェアの入手
-
接続
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
お客様の S32K324トリプルPMSM制御リファレンス・デザイン・ボード
パッケージの内容
1.1 MCTPTX1AK324リファレンス・デザイン・ボードについて
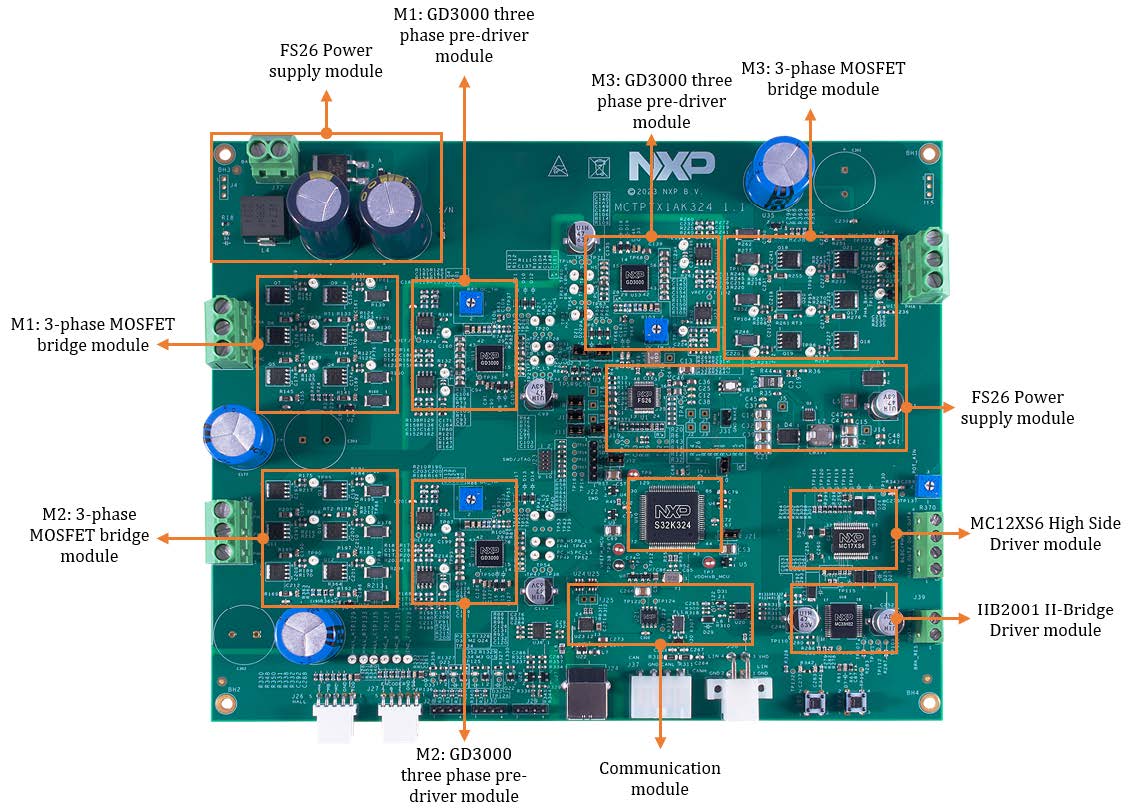
1.2 ブロック図の特長

ソフトウェアの入手
以下のステップ・バイ・ステップ・ガイドに従って、MCTPTX1AK324モータ制御キットを設定してください。
2.1 開発キットのダウンロード - アプリケーション・ソフトウェア
このソフトウェア・パッケージには、ほとんどの一般的なハードウェア構成向けのプロジェクトが含まれています。
MCSPTE1AK344開発キット・アプリケーション・ソフトウェアのダウンロード
注:インストール時に、車載用演算/モータ制御ライブラリ (AMMCLib) セットの最新版もダウンロードするよう求められます。
2.2 統合開発環境 (IDE) の入手
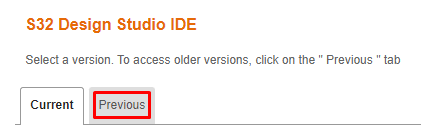
S32 Design Studio IDE for S32 Platformバージョン3.4をダウンロードしてインストールします。
注:アクティベーション・コードは電子メールで送信されます。
注:バージョン3.4は「Previous(以前)」タブにあります。
2.3 S32K3xx開発パッケージのインストール
トップメニューから[Help(ヘルプ)] > [S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]を開きます。「S32K3xx development package(S32K3xx開発パッケージ)」に移動して、パッケージをインストールします。
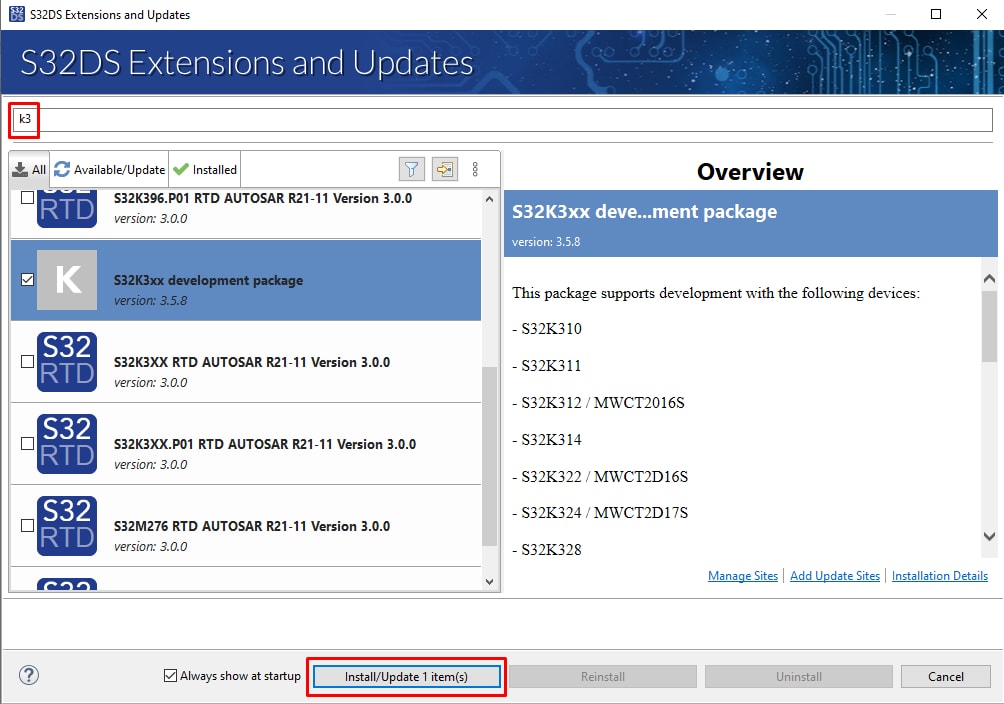
注:インストールで問題が発生する場合は、最新バージョンのS32 Design Studio PlatformパッケージおよびS32 Design Studio Platform Toolsパッケージがインストールされていることを確認してください。
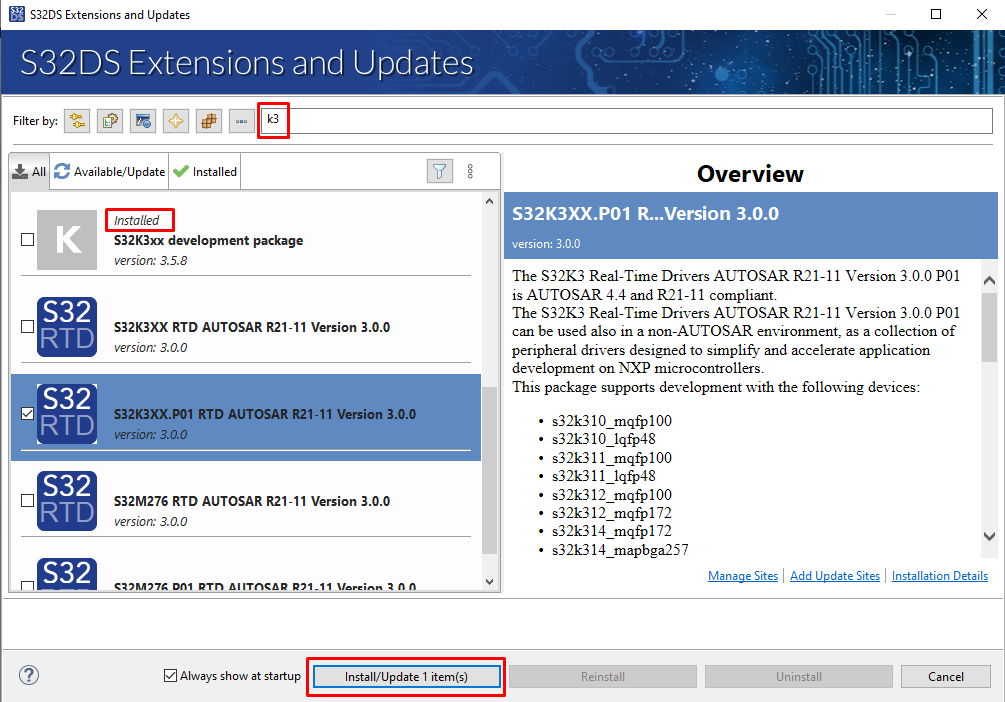
S32K3リアルタイム・ドライバのインストールを続行します。
2.5 ランタイム・デバッグ・ツールの入手
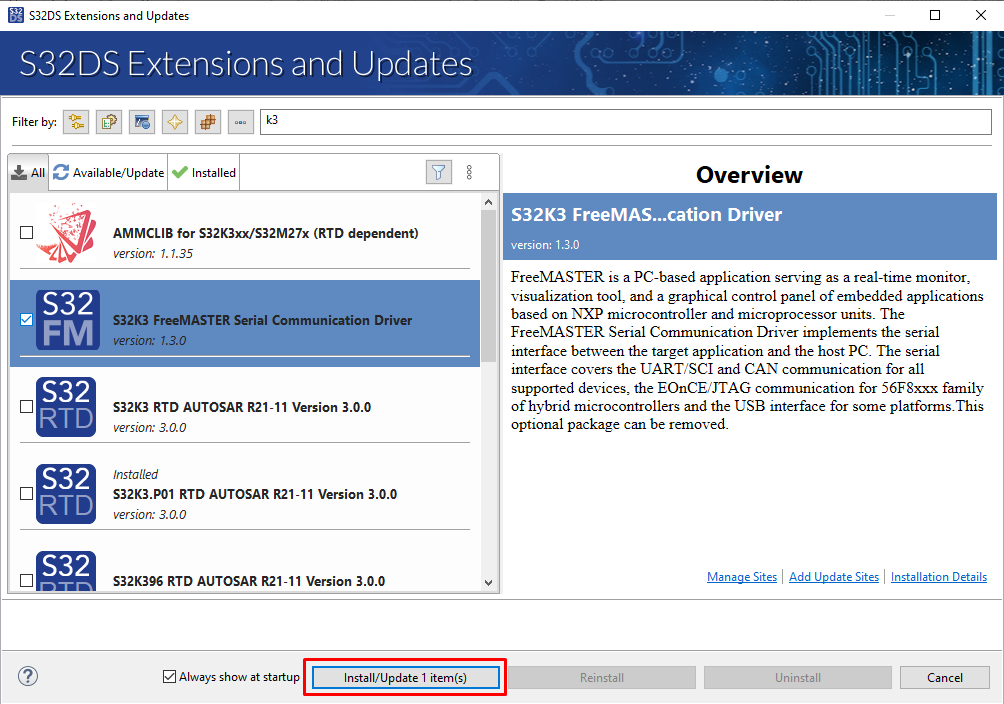
MCTPTX1AK324は、FreeMASTERランタイム・デバッグ・ツールを使用するとパフォーマンスが向上します。
注:FreeMASTERのページで最新バージョンをご確認ください。
S32K3マイクロコントローラ用のFreeMASTER通信ドライバも必要です。S32K3標準ソフトウェアパッケージの車載ソフトウェア - S32K3 - S32 FreeMASTERのリンクからダウンロードしてください。
「S32DS Extensions and Updates(S32DSの拡張と更新)」ダイアログ(メニュー > [Help(ヘルプ)] > [S32DS Extensions and Updates(S32DSの拡張と更新)])を開き、[Add Update Sites(更新するサイトの追加)]リンクをクリックして、ディスク上のS32K3用FreeMASTER通信ドライバ(名前が「com.」で始まるzipファイル)に移動します。
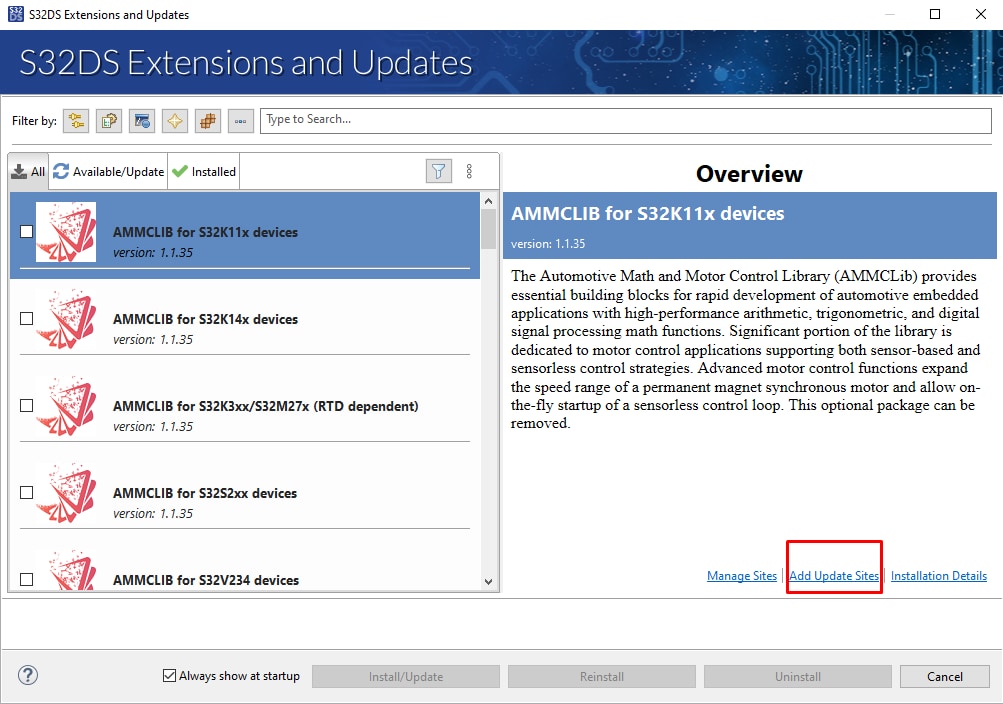
S32K3用のFreeMASTER通信ドライバをインストールします。
接続
3.1 MCTPTX1AK324評価ボードのジャンパのデフォルト位置の確認
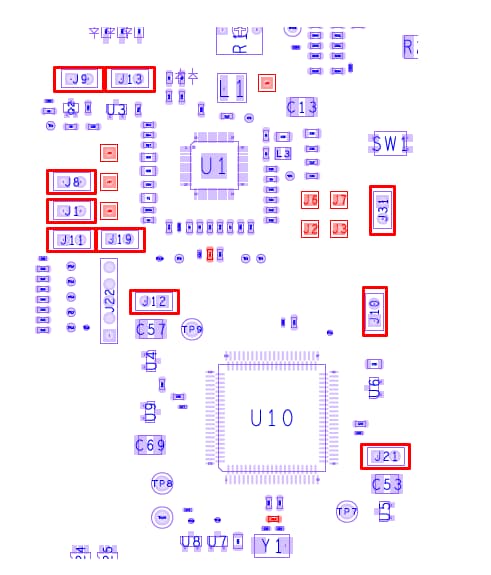
| デフォルトのジャンパ設定 | ||
|---|---|---|
| ジャンパ | 状態 | 備考 |
J1 |
閉 | USBへのUART用5 V |
J8 |
閉 | CAN PHY用5 V |
J9 |
閉 | FS26デバッグ・モードの有効化 |
J10 |
閉 | FS26 VCore 1.5 V (MCU VCore用) |
J11 |
閉 | FS26 LDO2 5.0 V(5.0 Vデバイス用) |
J12 |
閉 | MCU VDD_HV_A電源入力 |
J13 |
閉 | FS26デバッグ・モードの有効化 |
J19 |
閉 | FS26 LDO1 5.0 V(5 Vデバイス用) |
J21 |
閉 | MCU VDD_HV_B電源入力 |
J31 |
開 | FS26ウェイク入力 |
3.2 GD3000の過電流比較設定
過電流コンパレータ用のポテンショメータが約8~10 Aの位置(中央からわずかに左)に設定されていることを確認します。
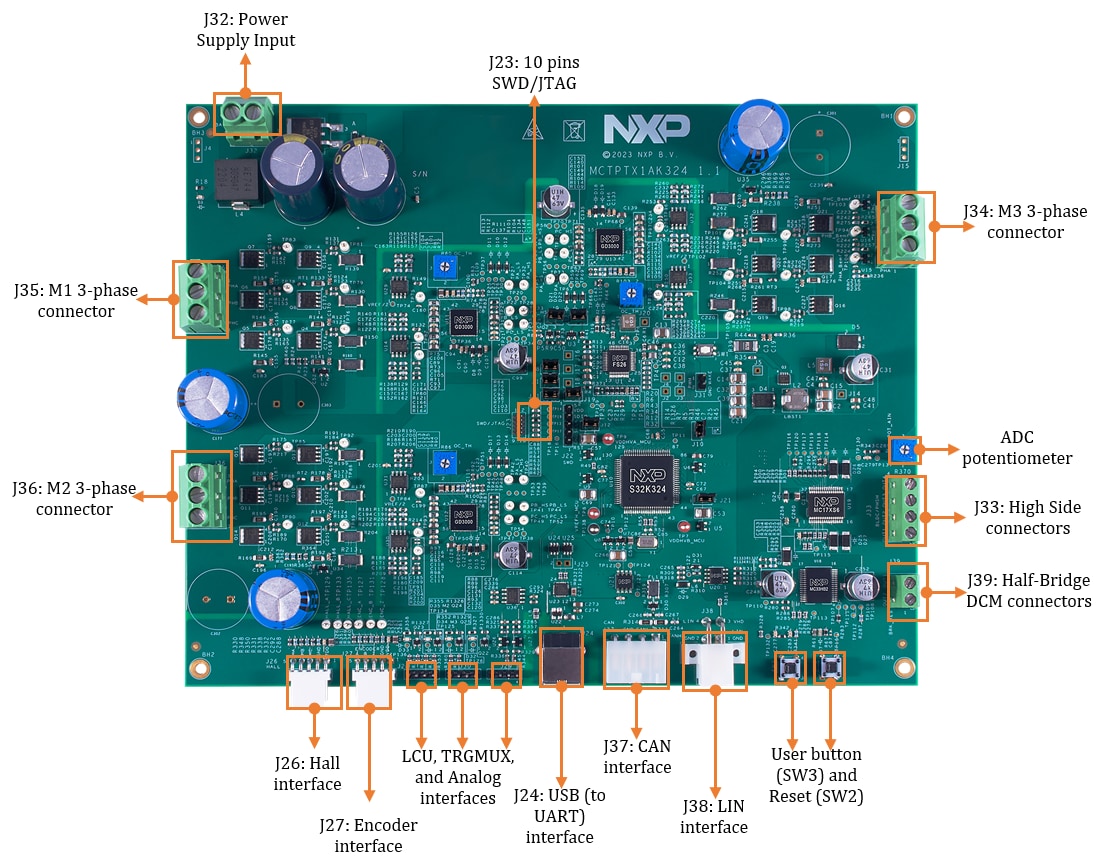
3.3 モータの接続
3つの永久磁石モータをコネクタJ34、J35、J36に接続します。DCモータをJ39に接続します。バルブを制御している場合は、それらをJ33に接続します。
3.4 電源の接続
MCTPTX1AK324開発ボードへの電力供給用の12 V電源ケーブルを取り付けると、D2、D3、D6のLEDが緑色に点灯します。
3.5 デバッガの接続
Arm-Cortexと互換性のあるJTAG/SWDデバッガをコネクタJ22またはJ23に接続します。
3.6 シリアル・インターフェースの接続
FreeMASTER通信用のJ24 USB-シリアル変換インターフェースを接続します。FreeMASTERを介してモータの制御や監視を行いたい場合には、これを接続してください。
3.7 CANインターフェースの接続
コネクタJ37はCAN通信用です。CANバスを介してモータの制御や監視を行いたい場合には、これを接続してください。
MCTPTX1AK324リファレンス・デザイン・ボードの起動
IDEを使用したデモ・プロジェクトのインポート
インストールされているアプリケーション・ソフトウェア・プロジェクトをS32 Design Studioにインポートします。

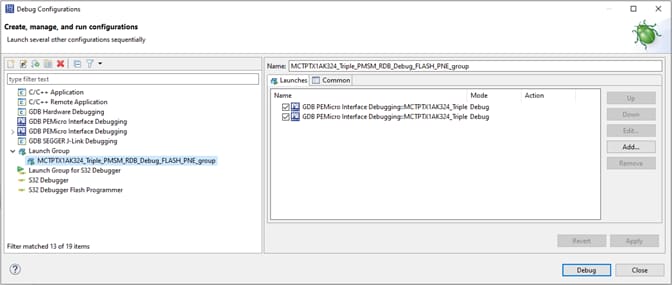
S32K324 MCUへのコードのロード
S32 Design Studioのメニューで[Run(実行)]>[Debug Configuration(デバッグ設定)]をクリックし、定義済みのデバッグ設定を選択して[Debug(デバッグ)]をクリックすると、ビルド済みコードのMCUへのロードが開始されます。
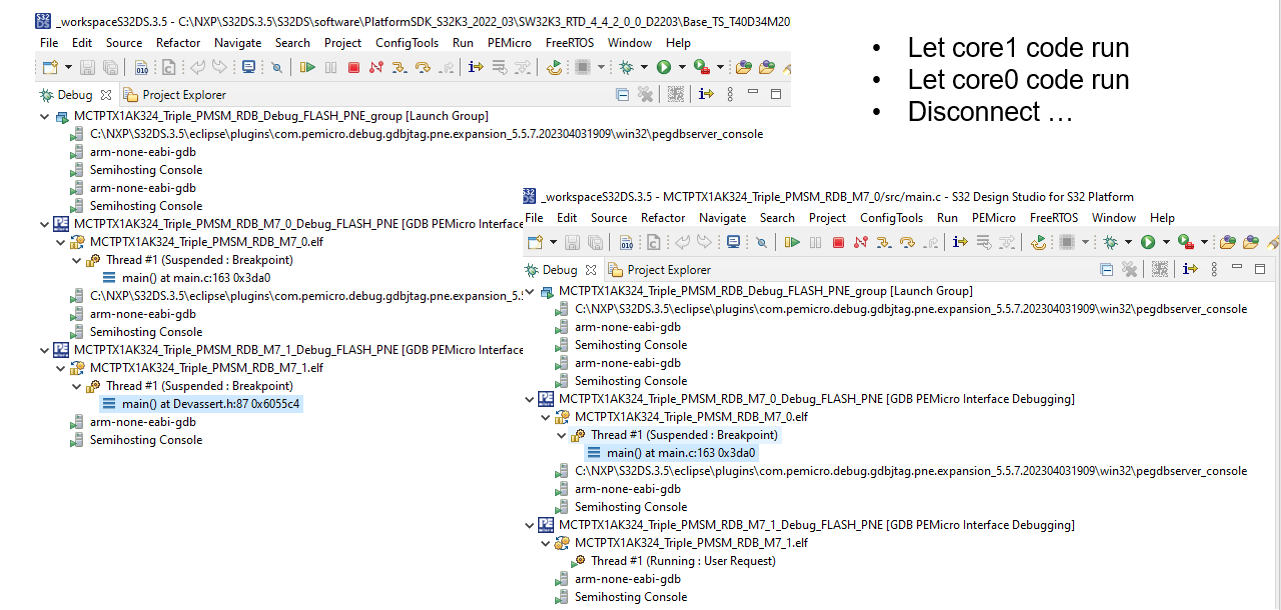
MCUでのコードの実行
コードがMCUにロードされるとS32DSがデバッグ画面に切り替わるので、[Resume(再開)]をクリックして(またはF8を押して)コードを実行し、[Disconnect(切断)]を使用してS32DS IDEデバッガとFreeMASTERツール間の干渉を回避します。
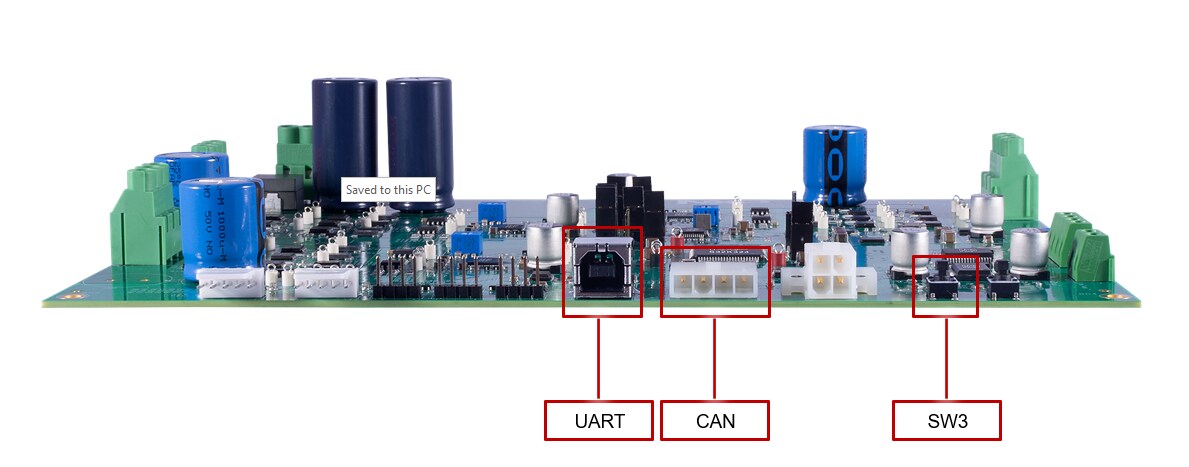
モータの作動
モータを作動させるには、UART上のFreeMASTER、CAN、およびSW3ボタンの3つの方法があります。
アプローチ1. FreeMASTERでモータを作動させる
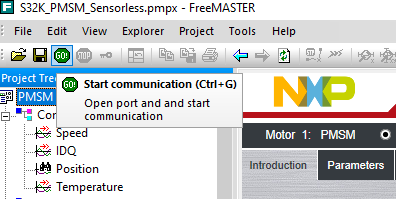
「MCTPTX1AK324_Triple_PMSM_RDB_M7_0 \FreeMASTER_control」フォルダの「S32K_PMSM_Sensorless.pmpx」ファイルを開きます。

FreeMASTERツールバーの緑の[Go!(実行)]ボタンをクリックして(または
通信が成功すると、最下部のステータス・バーに次のように表示されます。
RS232 UART Communication;COMn; speed = 115200
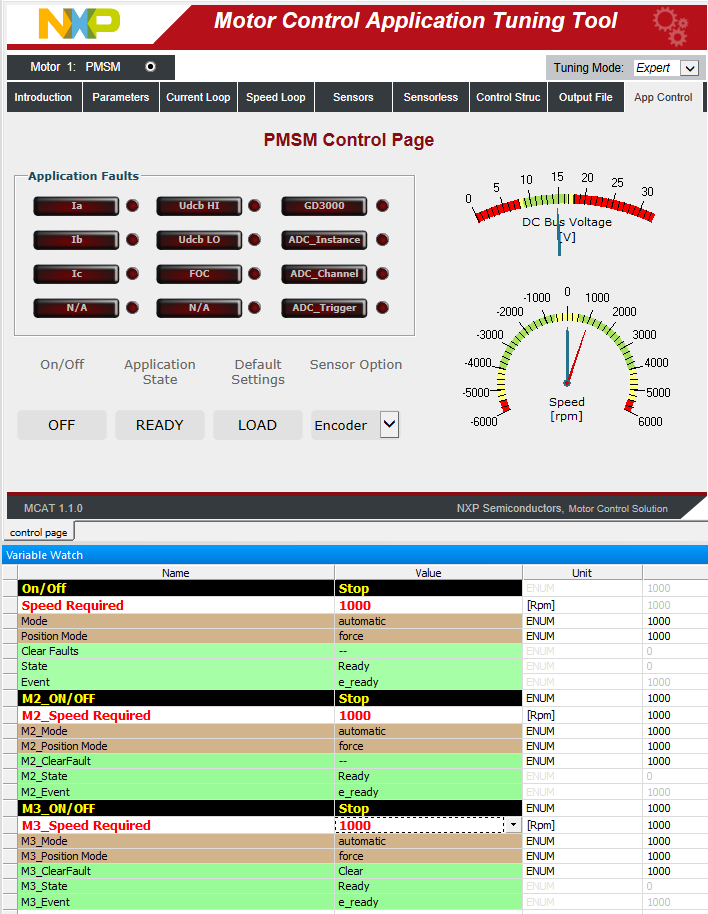
FreeMASTERで[Control page(制御ページ)]タブに進み、必要なモータrpmを設定して、モータ・ドライブをオンにします。
アプローチ2. CANバスでモータを作動させる
CANインターフェースを使用してボードを接続します。
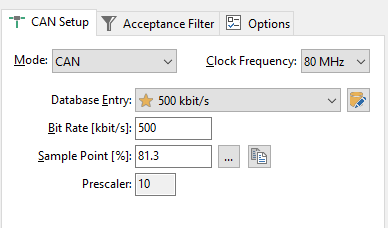
0x01のIDを使用してCAN標準フレームを送信し、モータを起動します。モータの状態はID 0x02と0x03のフレームによってフィードバックされます。
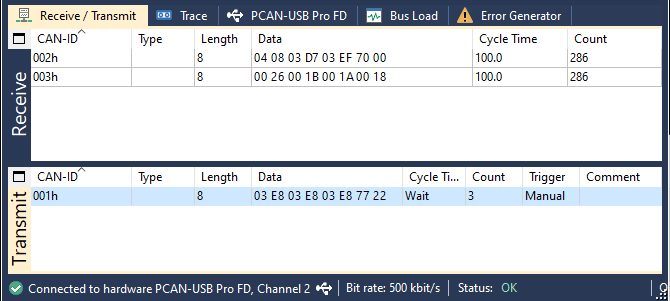
CANフレームの定義表。

設計・リソース
ボードに関するドキュメント
チップに関するドキュメント
- S32K3 MCUベースのモータ制御ソリューションのパンフレット
- S32K3 Arm Cortex-M7ベースの車載用MCUのパンフレット
- S32K3xxDS:S32K3xx MCUファミリ - データ・シート
- FS26、ASIL D/ASIL B対応低消費電力セーフティ・システムベーシス・チップ - 製品概要
- S32K3xx MCUファミリ - リファレンス・マニュアル
- マスク0P55A/1P55A用マスク・セット・エラッタ - エラッタ
- MC33GD3000、三相電界効果トランジスタ・プリドライバ - データ・シート
- MC33HB2001、10 A Hブリッジ、プログラマブル・ブラシ付きDCモータ・ドライバ - データ・シート
- MC12XS6D1、17 mΩおよび7.0 mΩハイサイド・スイッチ - データ・シート
ソフトウェア
- S32K3標準ソフトウェア・パッケージ
- S32K3リファレンス・ソフトウェア・パッケージ
- S32 Design Studio IDE
- リアルタイム・ドライバ (RTD)
- S32K消費電力計算ツール (PET)
- モデルベース設計ツールボックス (MBDT)
- 構造コア・セルフテスト (SCST) ライブラリ
- FreeMASTERランタイム・デバッグ・ツール
- プラットフォーム間通信フレームワーク (IPCF)
- 車載用演算/モータ制御ライブラリ (AMMCLib)
- S32セーフティ・ソフトウェア・フレームワーク (SAF) およびセーフティ・ペリフェラル・ドライバ (SPD)
- 車載ソフトウェア・パッケージ・マネージャ
- MCTPTX1AK324開発キット・アプリケーション・ソフトウェア
- MCTPTX1AK324評価ボード・ソフトウェアのユーザー・マニュアル
参考リンク
フォーラム
NXPのコミュニティ・サイトで、他のエンジニアとつながり、MCTPTX1AK324を使用した設計に関する専門的なアドバイスを受けることができます。
このページ
- 2.1
開発キットのダウンロード - アプリケーション・ソフトウェア
- 2.2
統合開発環境 (IDE) の入手
- 2.3
S32K3xx開発パッケージのインストール
- 2.4
車載用演算/モータ制御ライブラリ (AMMCLib) の入手
- 2.5
ランタイム・デバッグ・ツールの入手
- 3.1
MCTPTX1AK324評価ボードのジャンパのデフォルト位置の確認
- 3.2
GD3000の過電流比較設定
- 3.3
モータの接続
- 3.4
電源の接続
- 3.5
デバッガの接続
- 3.6
シリアル・インターフェースの接続
- 3.7
CANインターフェースの接続