S32M276モータ制御のクイック・スタート・ガイド
このドキュメントの内容
-
パッケージの内容
-
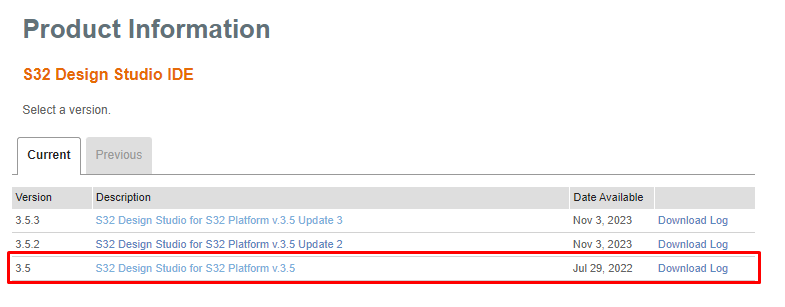
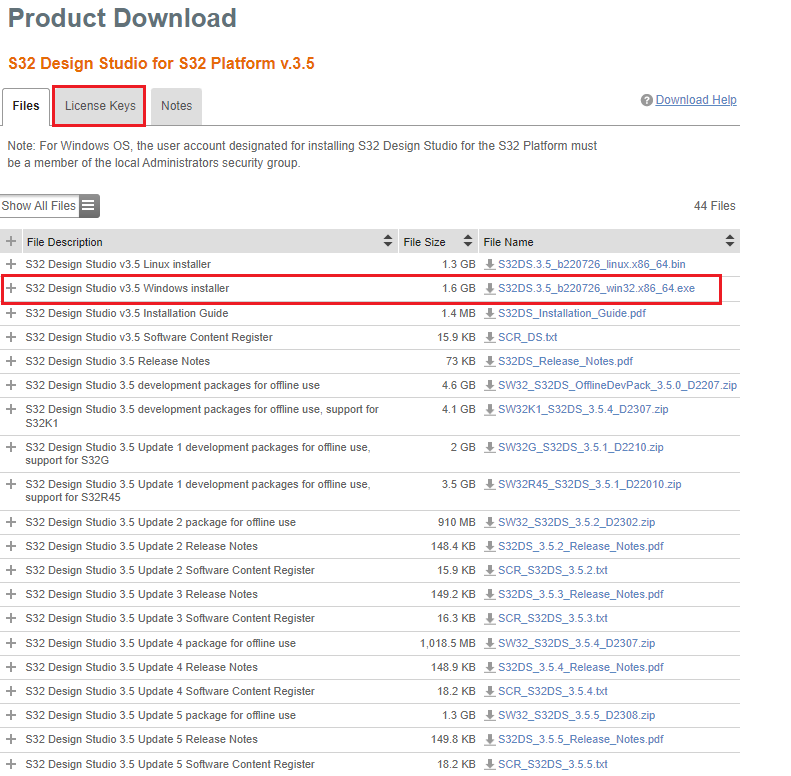
ソフトウェアの入手
-
接続
-
ビルドと実行
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。

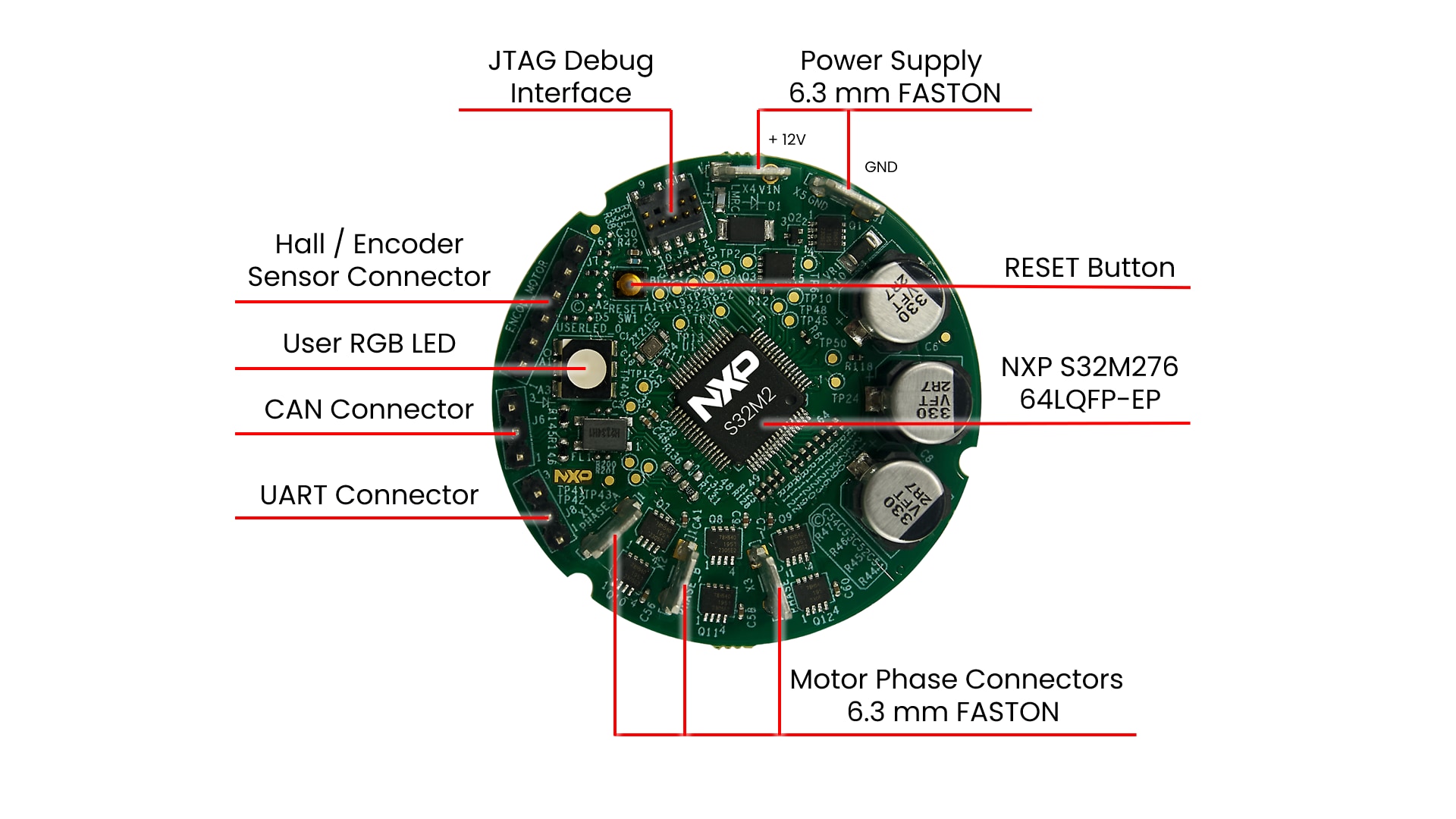
お客様の S32M276SFFRD車載モータ制御用リファレンス・デザイン・ボード
1. パッケージの内容
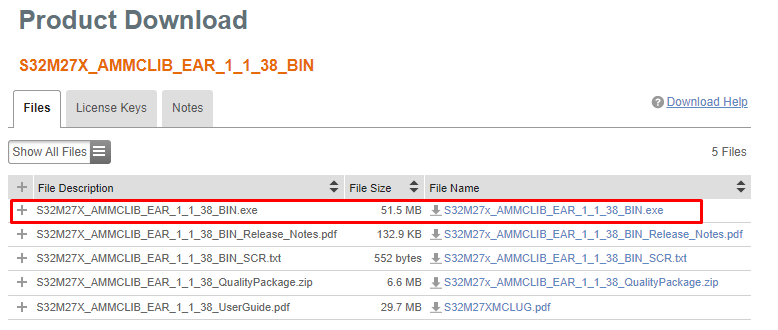
2. ソフトウェアの入手
資格情報を使用してNXPにサインインします
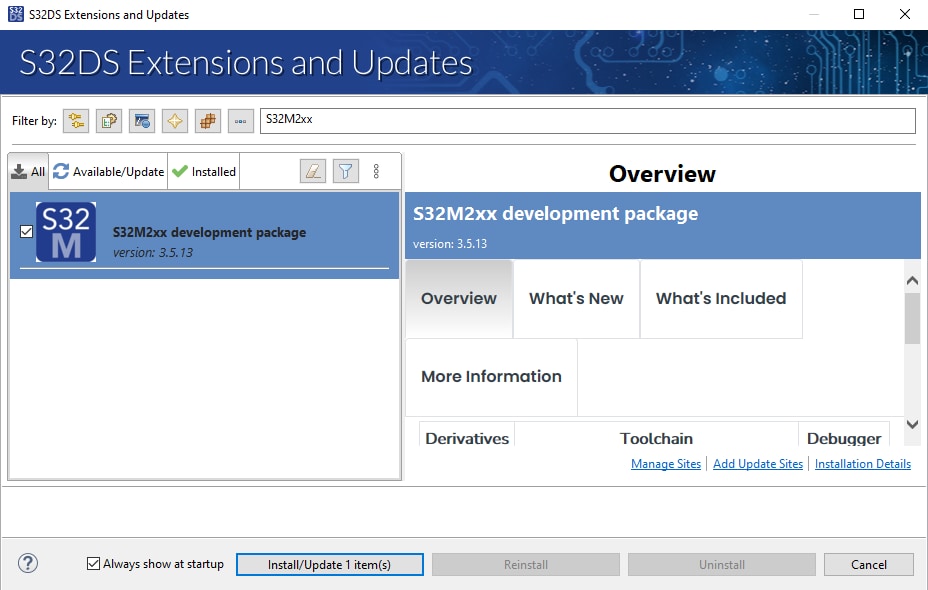
2.2 S32M2xx開発パッケージのインストール
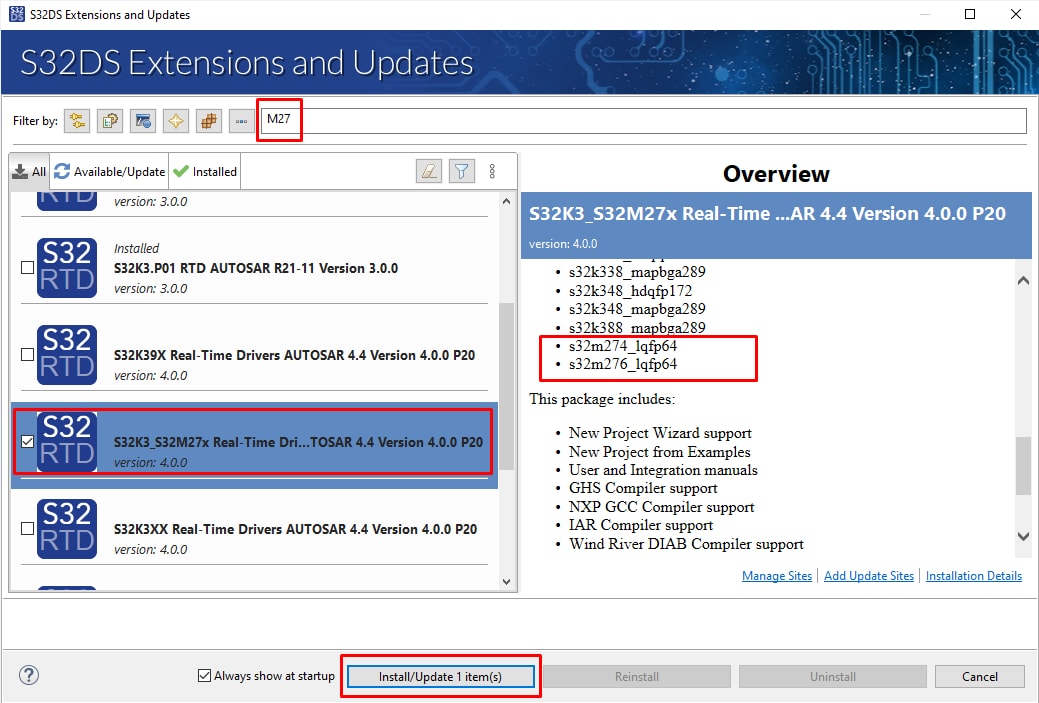
S32DSで、トップメニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
S32M2xx開発パッケージをインストールします
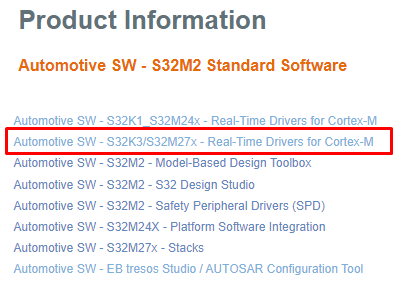
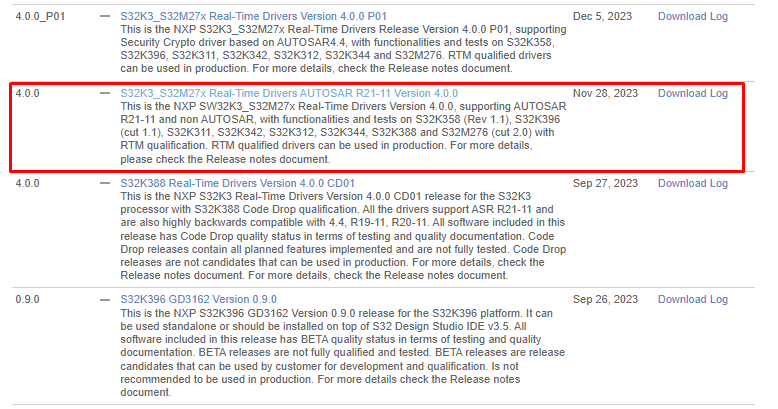
2.3 RTDドライバのダウンロード
RTD for S32K3 and S32M27x version 4.0.0をダウンロードします。
「Automotive SW - S32K3/S32M27x - Real-Time Drivers for Cortex-M」パッケージを選択し、更新サイト・ファイルをダウンロードします。
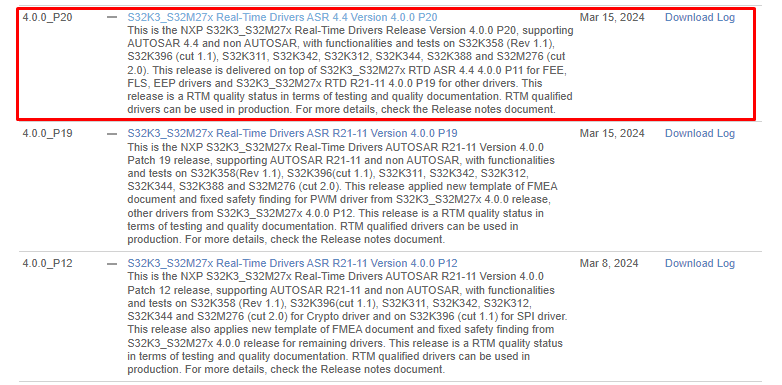
2.4 RTDドライバ用パッチのダウンロード
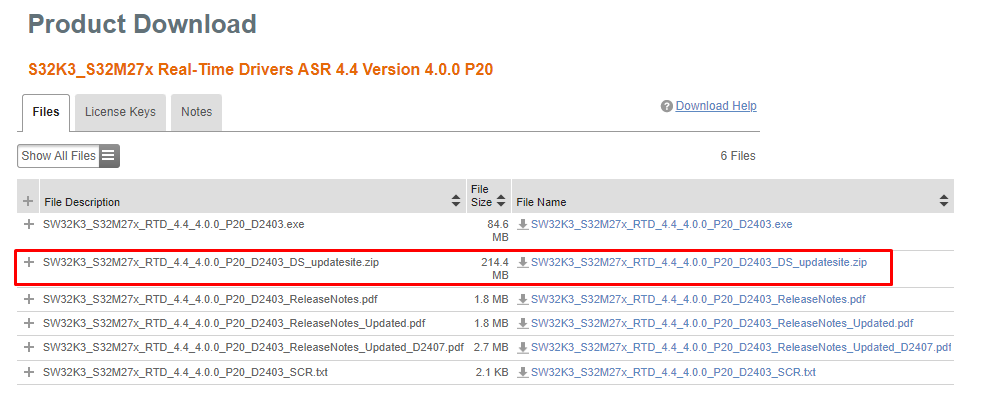
RTD for S32K3 and S32M27x version 4.0.0 patch P20をダウンロードします。
「Automotive SW - S32K3/S32M27x - Real-Time Drivers for Cortex-M」パッケージを選択し、更新サイト・ファイルをダウンロードします。
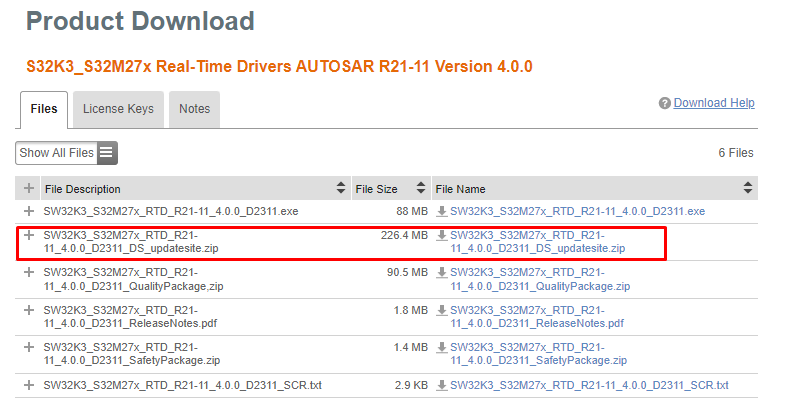
2.5 S32DSへのRTDドライバの追加
S32DSで、トップメニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開いたら、[Add Update Sites(更新サイトの追加)]リンクをクリックします。
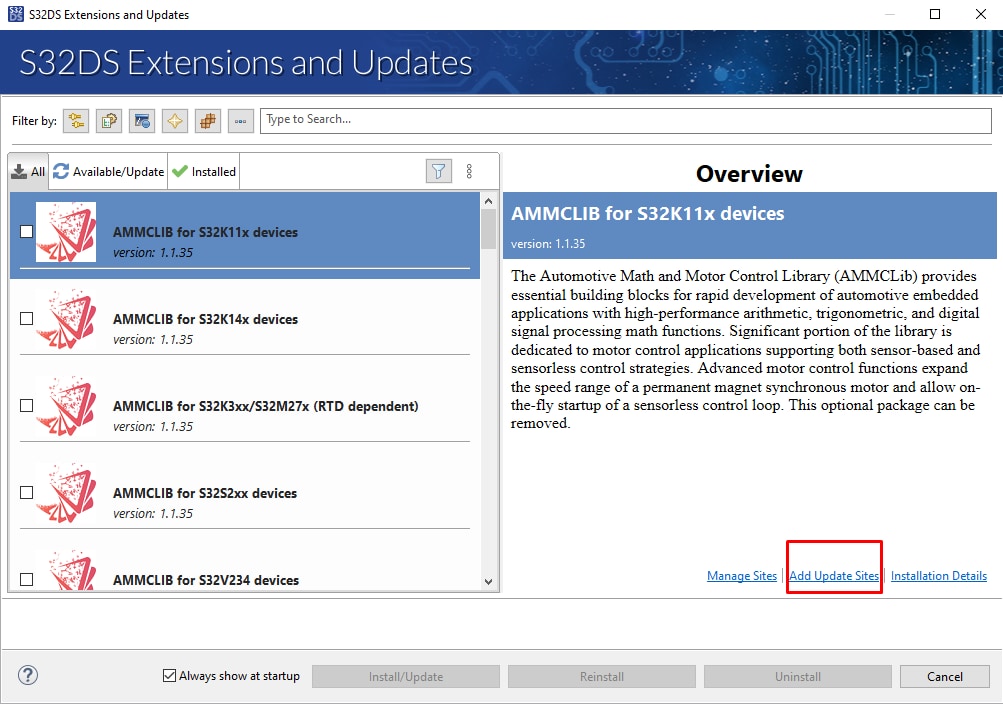
ダウンロード済みの「SW32K3_S32M27x_RTD_R21-11_4.0.0_D2311_DS_updatesite.zip」ファイル(ファイル名が短い方)を選択します。
2.6 RTDドライバのインストール
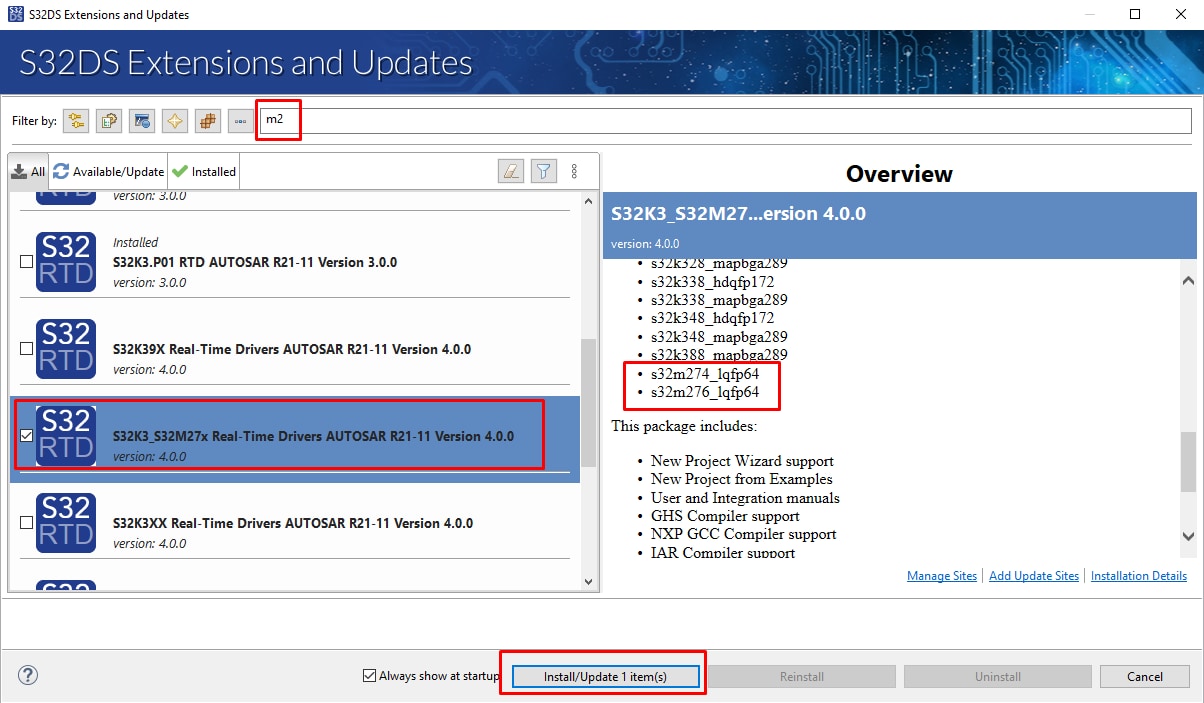
リストからRTD 4.0.0をインストールします。RTD 4.0.0がリストに複数表示されることにご注意ください。必ずS32M27xのみをサポートしているバージョン、またはS32M27xとそれ以外をサポートしているバージョンを選択してください(右側の[Overview(概要)]ウィンドウの内容を確認してください)。
2.7 S32DSへのRTDパッチ20の追加
パッチP20の「SW32K3_S32M27x_RTD_4.4_4.0.0_P20_D2403_DS_updatesite.zip」ファイル(ファイル名が長い方)についても、インストール手順2.5と2.6を繰り返します。
ここでも、必ずS32M27xのみをサポートしているバージョン、またはS32M27xとそれ以外をサポートしているバージョンを選択してください。

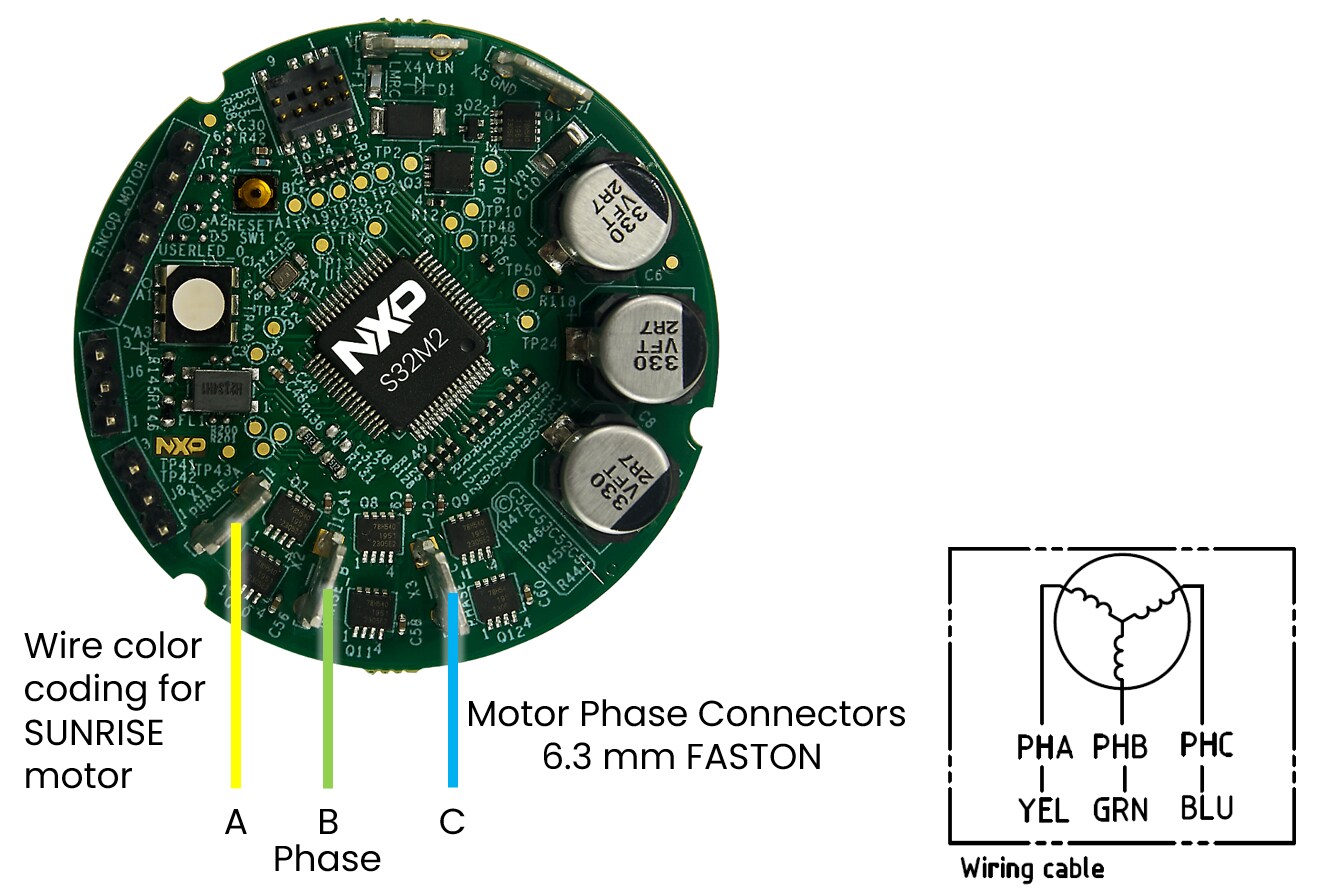
3. 接続
S32M276SFFRDボードに推奨されるアクセサリ・キットはBLDC_KIT(ソフトウェア開発済みおよび特定のモータ向けに調整済み)ですが、代わりに任意の適切な三相モータと12 V電源を使用することもできます。

BLDC_KITの内容:
- ホール・センサSunrise 42BLY3A78-24110を搭載した95 W BLDCモーター
- アクリル樹脂板
- 12 V、5 A電源Meanwell GST60A12-P1J
- ユニバーサル・プラグ一式を備えた電源ケーブル
- EVB用の4個の自己接着スタンドオフTakachi AST3-10B
- Micro-USBケーブル
BLDC_KITに加えて、以下も必要になります。
- 標準6.3 mm FASTONコネクタ(モータ用3個、電源用2個)
- 2.1 mmバレル・コネクタ(オス)からFASTONへのワイヤ変換
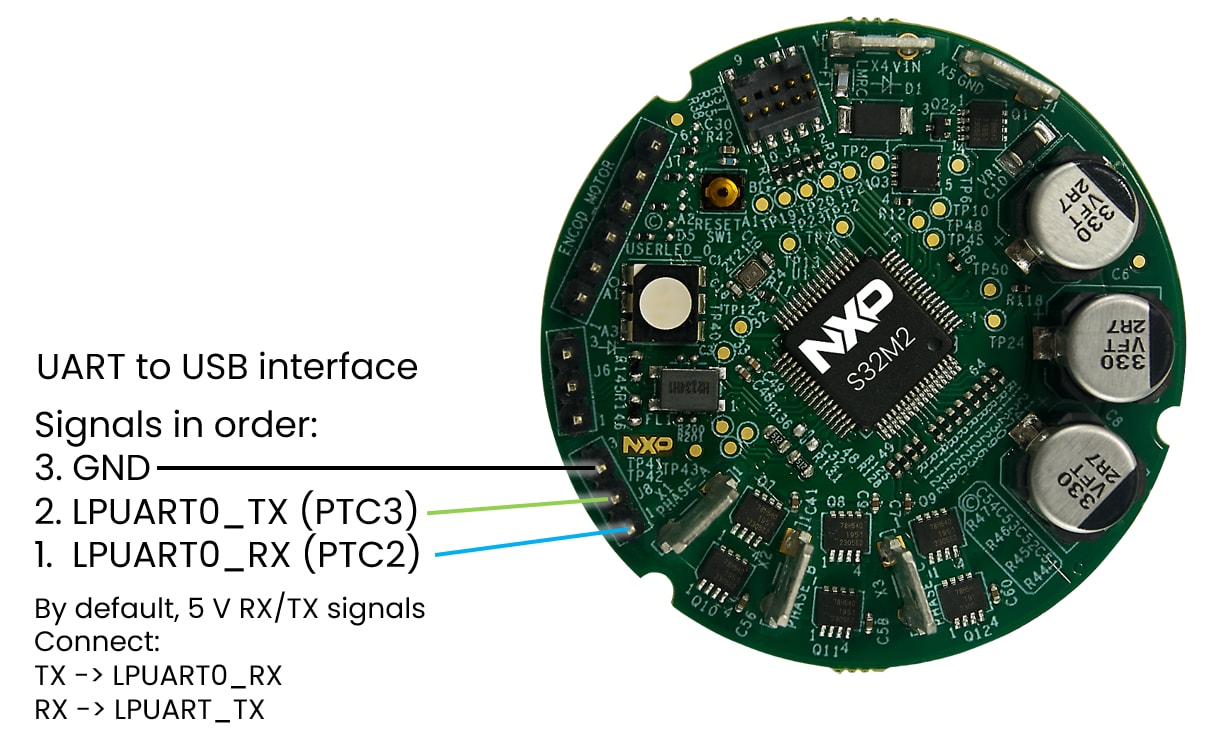
- ランタイム・デバッグ用UART-USBシリアル・インターフェース
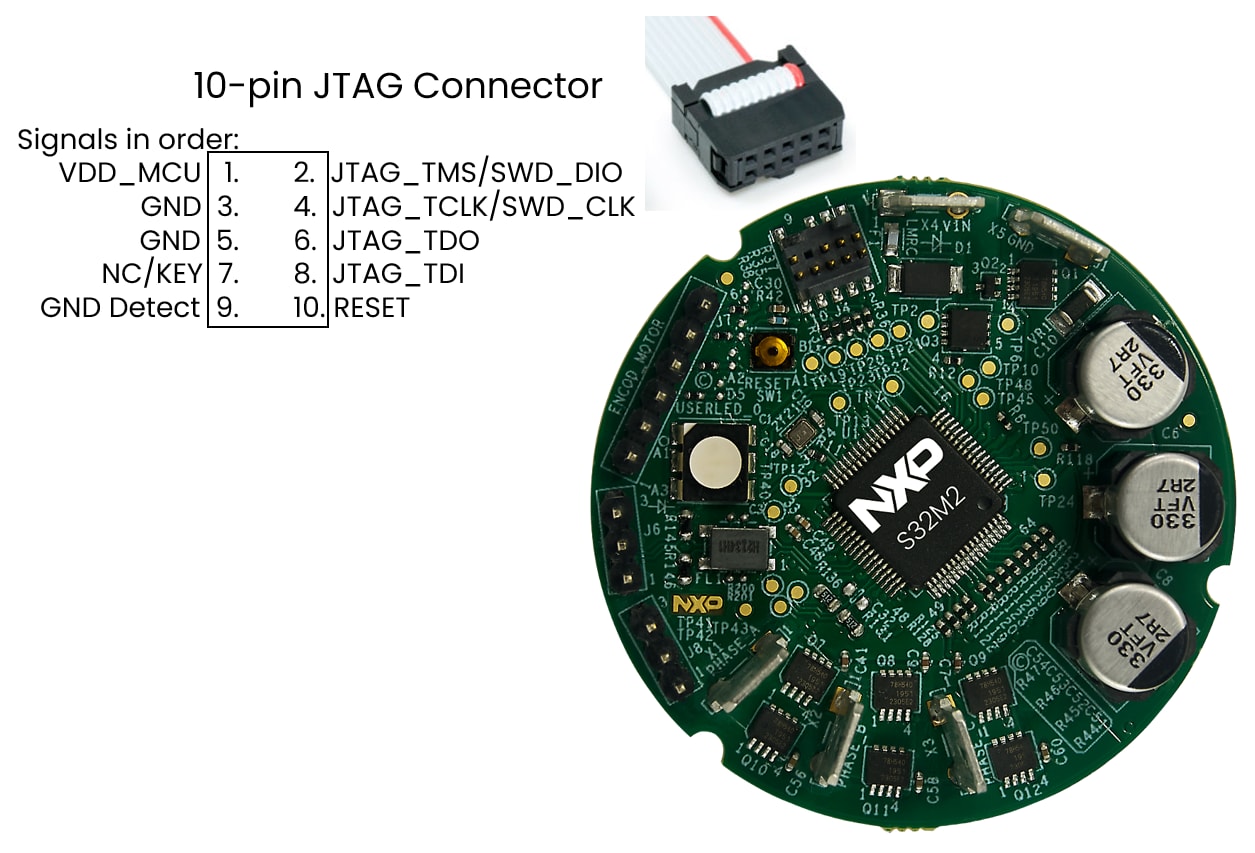
- PEmicro USB MultilinkまたはSegger J-LinkなどのJTAGデバッグ・インターフェース
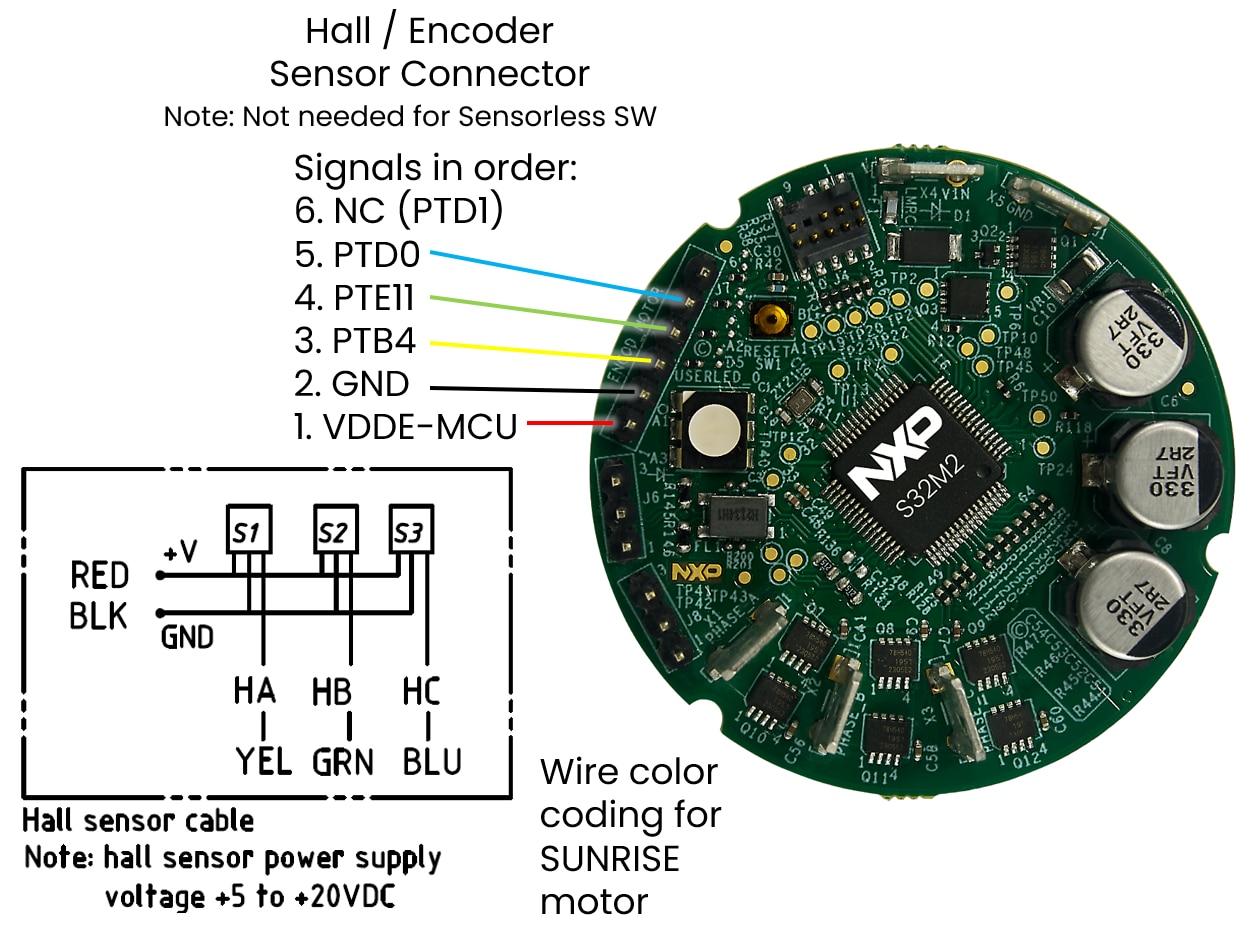
3.2 エンコーダ/ホール・センサの接続
必要に応じてエンコーダ/ホール・センサを接続します(センサ・ベースのソフトウェア・アプリケーションの場合のみ)。
4. ビルドと実行
S32M276SFFRDモータ制御キットの動作テストを行いましょう。
4.1 アプリケーションの選択とMCUプログラミング
インストールしたディレクトリから適切なPMSMまたはBLDCモータ制御アプリケーションを選択します。
NXP\MC_DevKits\S32M276SFFRD\sw インストールされているアプリケーション・ソフトウェア・プロジェクトをS32 Design Studio IDE for S32 Platformにインポートするには、次の手順に従います。
- S32DS for S32 Platformを起動します。
- [File(ファイル)]→[Import(インポート)]に移動し、[General(全般)]→[Existing Projects into Workspace(既存プロジェクトをワークスペースへ)]を選択します
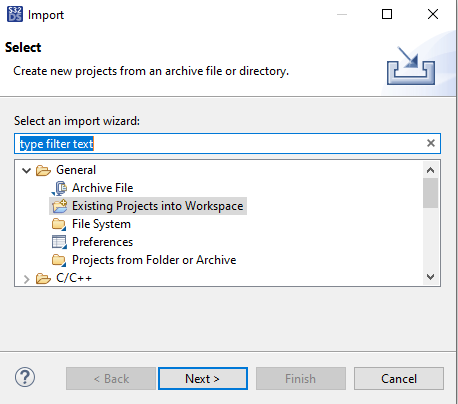
- インストールされているアプリケーション・ディレクトリ
NXP\MC_DevKits\S32M276SFFR\swに移動し、適切なプロジェクトを選択したら、[OK]をクリックします。[Finish(完了)]をクリックします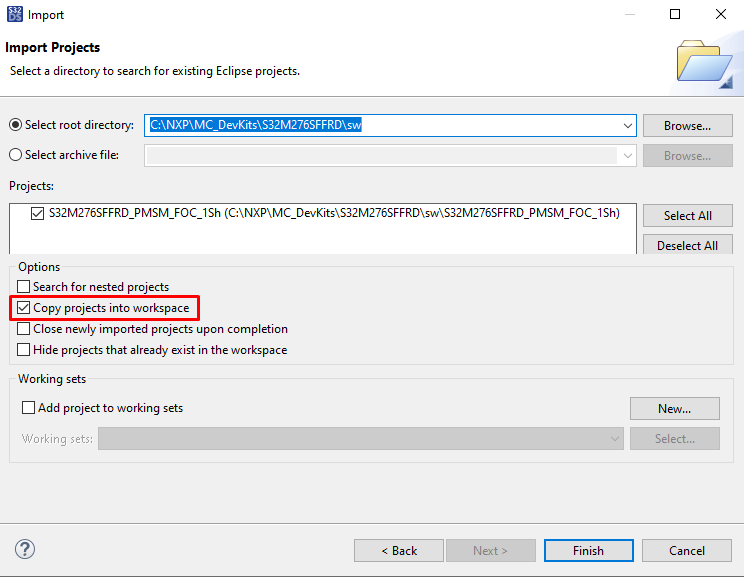
4.2 設定ツールの使用
- プロジェクト構造を展開して下位レベル・ドライバを表示し、
*.mexファイルをダブルクリックして「S32設定ツール」のプロジェクト設定を開きます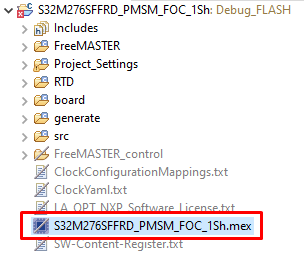
- 適切なプロジェクトを設定していることを確認し、[Update Code(コードの更新)]ボタンをクリックして設定ファイルを生成します

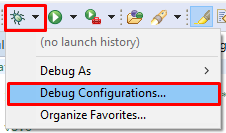
4.3 ソフトウェアのアップロードとデバッグ
S32DSで、C/C++画面に戻ります。
[Debug Configuration(デバッグ設定)]メニューを使用し、ソフトウェアをビルドしてMCUにアップロードするための定義済みデバッグ設定を選択します。
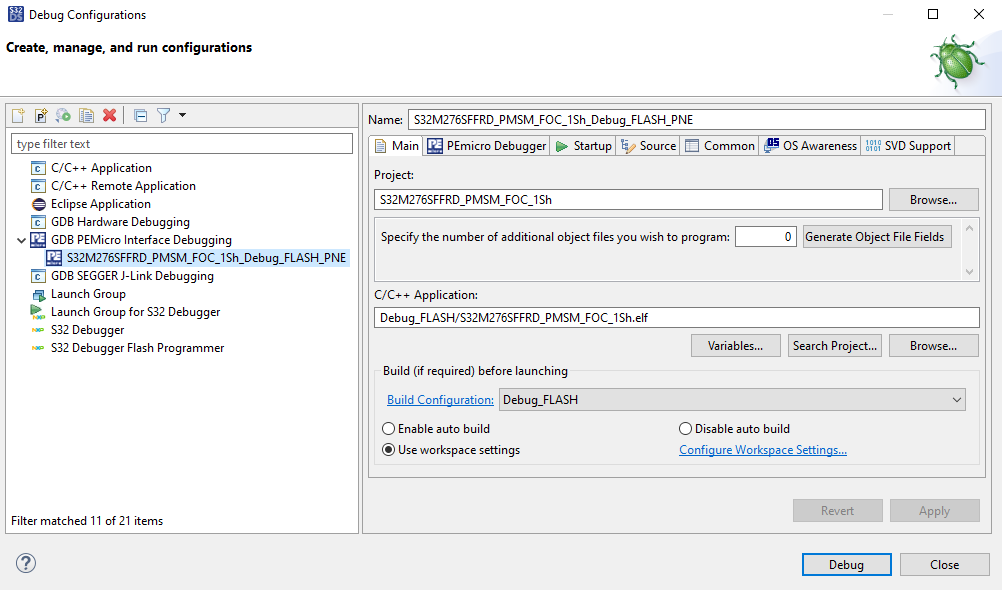
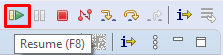
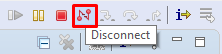
S32DSがデバッグ画面に切り替わるので、[Resume(再開)]をクリックして(またはF8を押して)コードを実行し、[Disconnect(切断)]を使用してS32DS IDEデバッガとFreeMASTERツール間の干渉を回避します。
4.4 デバッグ・ツールの設定
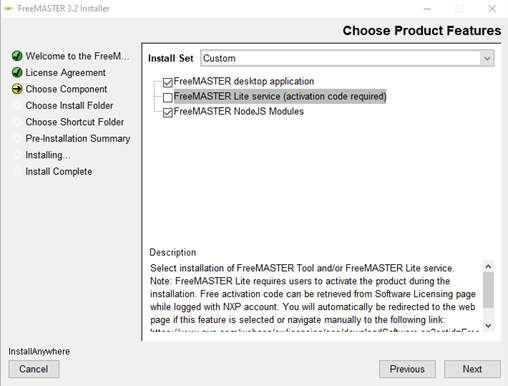
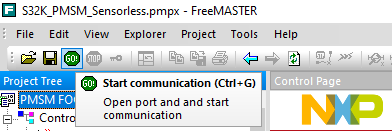
FreeMASTERアプリケーションを起動します。
*.pmpx FreeMASTERプロジェクト

通信を有効にするには、FreeMASTERツールバーで[Go]をクリックします(またはCtrl+Gを押します)。
通信が成功すると、最下部のステータス・バーに「RS-232 UART Communication;COMn;speed = 115200」と表示されます
アプリケーション制御
モーターのパラメータ(必要な場合の手順)
BLDC_KIT(モーターSunrise 42BLY3A78-24110)を使用しない場合は、使用するBLDC/PMSMモーターに応じて、モーターのパラメータを編集する必要がある場合があります。モータ制御アプリケーション・チューニング (MCAT) ツールの[Parameters(パラメータ)]タブを開き、左側の値を編集します。
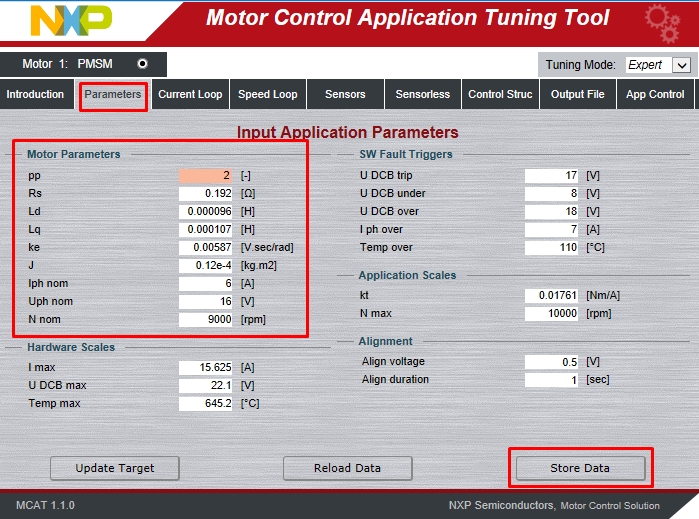
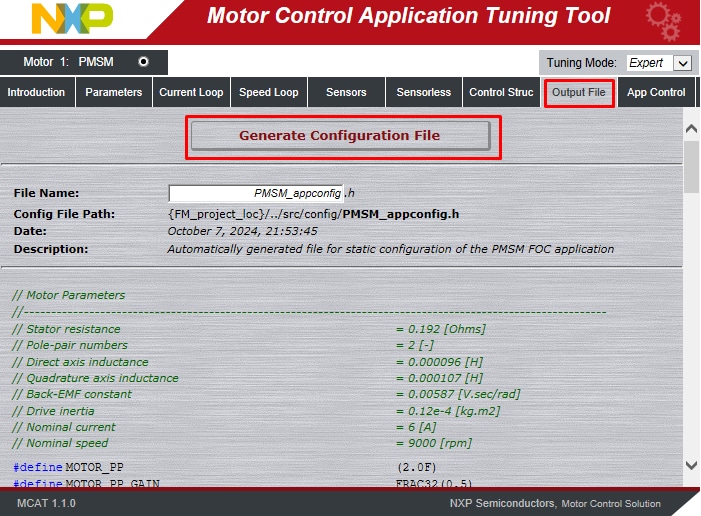
完了したら[Store Data(データを保存)]をクリックし、[Output File(出力ファイル)]タブに切り替えて、[Generate static configuration file(静的設定ファイルを生成)]をクリックします。
手順4.3を再度実行し、プロジェクトをビルドしてコードをMCUにアップロードします。
モーターを回転させる
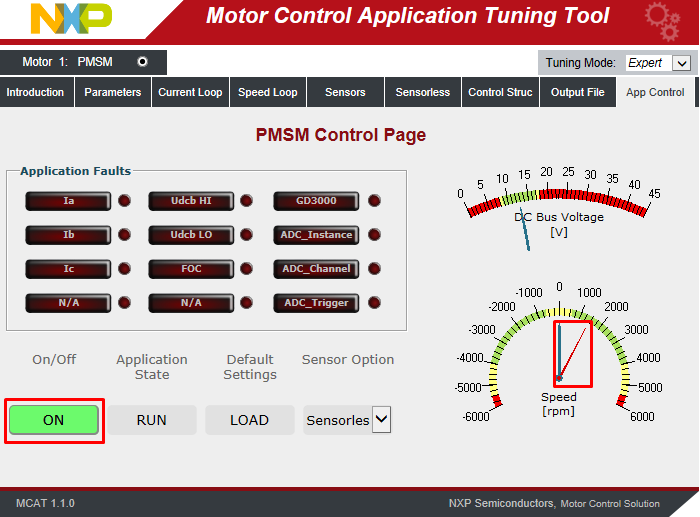
モータ制御アプリケーション・チューニング (MCAT) ツールのメニューで[App Control(アプリケーション制御)]タブをクリックして、アプリケーション制御ページを表示します。
モーターの回転数を設定し、モーター・ドライブをオンにします。
保留中の障害の確認
保留中の障害がある場合は、FreeMASTER MCATの制御ページで[Clear FAULT(障害をクリア)]をクリックします。
アプリケーションの起動
制御ページで[ON/OFF]をクリックして、ロータの時計回り/反時計回りの回転を開始します。
速度の設定
速度を設定するには、Speed Required変数を変更します。[Variable Watch(変数監視)]ウィンドウを開き、Speed Required変数を変更するか、スピード・ゲージをクリックします。
アプリケーションの停止
FreeMASTER MCATの制御ページで[ON/OFF]ボタンをクリックしてアプリケーションを停止します。
RTDサンプル
これらの便利なサンプルを使用してRTDの開発を始めましょう。開発を進めるのに役立つ資料として、最も一般的なユース・ケースのいくつかをまとめました。
ユーザーは、RTDをダウンロードしたら、ウィンドウに直接パスをコピーできます。
RTDサンプル
AE HANDLER FAULTS
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ae_TS_T40D34M30I0R0\examples\S32DS\S32M276\Ae_Handler_Faults_Example_DS_001_S32M276AE SPI
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ae_TS_T40D34M30I0R0\examples\S32DS\S32M276\Ae_Spi_Example_DS_001_S32M276AEC SPI
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ae_TS_T40D34M30I0R0\examples\S32DS\S32M276\Aec_Ip_Spi_Example_DS_001_S32M276CAN TRCV
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\CanTrcv_43_AE_TS_T40D34M30I0R0\examples\S32DS\S32M276\CanTrcv_Example_S32M276DPGA
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Dpga_TS_T40D34M30I0R0\examples\S32DS\S32M276\Dpga_example_S32M276DPGA IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Dpga_TS_T40D34M30I0R0\examples\S32DS\S32M276\Dpga_Ip_example_S32M276GDU
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Gdu_TS_T40D34M30I0R0\examples\S32DS\S32M276\Gdu_Example_DS_S32M276LIN TRCV
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Lin_43_LPUART_FLEXIO_TS_T40D34M30I0R0\examples\S32DS\S32M276\Lin_LinTrcv_Flexio_MasterFrameTransfer_S32M276LIN TRCV LPUART
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Lin_43_LPUART_FLEXIO_TS_T40D34M30I0R0\examples\S32DS\S32M276\Lin_LinTrcv_Lpuart_MasterFrameTransfer_S32M276CLOCK IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Mcu_TS_T40D34M30I0R0\examples\S32DS\S32M276\Clock_Ip_Example_S32M276MCU
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Mcu_TS_T40D34M30I0R0\examples\S32DS\S32M276\Mcu_Example_S32M276POWER IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Mcu_TS_T40D34M30I0R0\examples\S32DS\S32M276\Power_Ip_Example_S32M276MEM OTP IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ocotp_TS_T40D34M30I0R0\examples\S32DS\S32M276\Mem_Otp_Ip_Example_S32M276OCOTP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ocotp_TS_T40D34M30I0R0\examples\S32DS\S32M276\Ocotp_Example_S32M276PLATFORM MPU HLD
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Platform_TS_T40D34M30I0R0\examples\S32DS\S32M276\Platform_MPU_HLD_Example_S32M276MPU IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Platform_TS_T40D34M30I0R0\examples\S32DS\S32M276\Platform_MPU_IP_Example_S32M276PORT
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Port_TS_T40D34M30I0R0\examples\S32DS\S32M276\Port_Example_S32M276SIUL2 PORT IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Port_TS_T40D34M30I0R0\examples\S32DS\S32M276\Siul2_Port_Ip_Example_S32M276WDOG
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Wdg_TS_T40D34M30I0R0\examples\S32DS\S32M276\Wdg_Example_S32M276WDOG IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Wdg_TS_T40D34M30I0R0\examples\S32DS\S32M276\Wdg_Ip_Example_S32M276設計・リソース
サポート
フォーラム
NXPのコミュニティ・サイトで、他のエンジニアとつながり、S32M276SFFRDリファレンス・デザイン・ボードを使用した設計に関する専門的なアドバイスを受けることができます。