GS-IMX93EVK: i.MX93 EVKスタート・ガイド
このドキュメントの内容
-
パッケージの内容
-
ソフトウェアの入手
-
ビルドと実行
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
お客様の i.MX 93評価キット
1. パッケージの内容
次のセクションでは、i.MX 93 EVKをブートする手順について説明します。
開発キットの内容:
- i.MX 93 EVKボード
- 電源:USB Type C 45 W給電、5 V/3 A、9 V/3 A、15 V/3 A、20 V/2.25 Aをサポート
- ケーブル:アセンブリ、USB 2.0、Type-CオスからType-Aオス
- ソフトウェア:eMMCでプログラムされたLinux BSPイメージ
- クイック・スタート・ガイド
i.MX 93 EVKでアプリケーションの開発を開始するには、i.MX 93アプリケーション・プロセッサのドキュメントで提供されている使用開始ビデオを参照してください。
1.2 eMMCからのブート
i.MX 93 EVKでは、ビルド済みのNXP Linuxバイナリ・デモ・イメージがeMMCに書き込まれています。内部のバイナリを変更することなく、eMMCからのブートにより、Linux上で他のアプリケーションをビルドするための特定の機能を備えたデフォルトのシステムが提供されます。
NXPの組込みLinux®、MCUXpresso SDKの詳細については、次のセクションを参照してください。
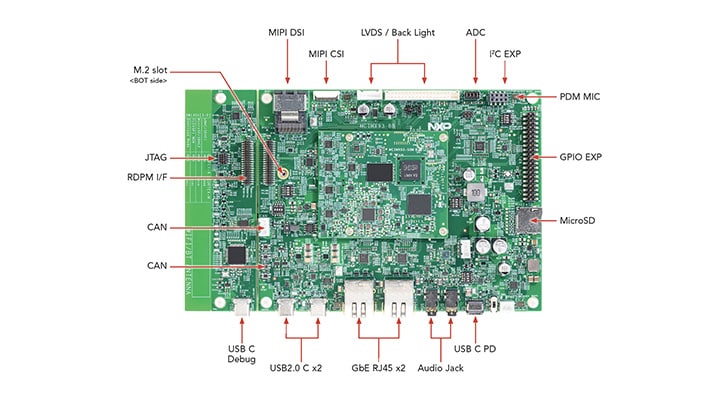
1.3 USBデバッグ・ケーブルの接続
付属のUSB Type-Cケーブルをデバッグ用UARTポートJ1401に接続し、ケーブルのもう一方の端をホスト・コンピュータに接続します。
4つのUART接続がホスト・コンピュータに表示されます。3番目のポートがA55コア用、4番目のポートがM33コアのシステム・デバッグ用です。
ターミナル・アプリケーションに慣れていない場合は、ステップ1.4に進む前に、次のいずれかのチュートリアルを参照してください。Minicomチュートリアル、Tera Termチュートリアル、PuTTYチュートリアル。
1.4 HDMIケーブルの接続
イメージ・バイナリに付属のユーザー・インターフェースを表示するには、MIPI-DSI J701でIMX-MIPI-HDMIケーブルを使用してモニタを接続します。
1.6 電源の接続
電源ケーブルを電源コネクタ (J301) に接続します。
スイッチ (SW1301) を使用してボードの電源を入れます。
プロセッサがオンチップROMコードから実行を開始します。デフォルトのブート・スイッチ設定では、このコードにより、ブータブル・イメージが格納されているメディアを指定するヒューズが読み取られます。ブータブル・イメージが見つかると、U-Bootの実行が自動的に開始されます。
Cortex A55のシリアル・コンソールに情報が表示されます。U-Bootプロセスを停止しない場合は、引き続きカーネルのブートが実行されます。
これでLinuxのブートは完了です。
ボードが起動すると、モニタの左上隅に2羽のペンギンが表示され、左上にLinuxターミナルのアイコン、右上にタイマが表示されます。これで準備が完了しました。
2. ソフトウェアの入手
このセクションは、ボードにLinux®オペレーティング・システムをロードする場合にのみ適用されます。
i.MX Linuxボード・サポート・パッケージ (BSP) は、特定のi.MX開発プラットフォームで組込みLinuxイメージをブートするために使用されるバイナリ・ファイル、ソース・コード、およびサポート・ファイルの集まりです。
Linuxバイナリ・デモ・ファイルの現在のリリースは、i.MXのLinuxダウンロード・ページにあります。その他のドキュメントは、i.MXソフトウェアおよび開発ツールのLinuxセクションにあるi.MX Linuxドキュメント・バンドルで入手できます。
2.1 概要
i.MXボード上でLinux OSカーネルがブートできるようになる前に、Linuxカーネルがブート・デバイス(SDカード、eMMCなど)にロードされ、そのデバイスをブートするようにブート・スイッチが設定されます。
各種のボードやブート・デバイス用のLinux BSPイメージをダウンロードするには、さまざまな方法があります。
このスタート・ガイドでは、Linux BSPをSDカードに転送するいくつかの方法の概要を説明します。経験豊富なLinux開発者は、必要に応じて他のオプションを検討することができます。
2.2 NXP Linux BSPのビルド済みイメージのダウンロード
i.MX 93 EVK用の最新のビルド済みイメージは、Linuxのダウンロード・ページでLinuxの最新バージョンの項目から入手できます。
ビルド済みのNXP Linuxバイナリ・デモ・イメージは、プロセッサの使用および評価のための標準的なシステムと基本的な機能のセットを提供します。システムを変更する必要なしに、ユーザーはハードウェアのインターフェースを評価し、SoC機能をテストし、ユーザー空間のアプリケーションを実行できます。
より柔軟性が必要な場合は、SDカードに個々のコンポーネント(ブート・ローダ、カーネル、dtbファイル、rootfsファイル)を1つずつロードするか、*wicイメージをロードして個々の部分を特定のコンポーネントで上書きします。
2.3 Universal Update Utility (UUU) を使用したNXP Linux BSPイメージの書き込み
「パッケージの内容」セクションでの接続に加えて、適切なUSBケーブルを使用してUSB1をホスト・マシンに接続します。
ボードの電源を切ります。「1.5 ブート・スイッチの設定」セクションを参照し、シリアル・ダウンロード・プロトコル (SDP) モードでブートするようにボードを設定します。
ホスト・マシンで使用されているOSに応じて、Linux BSPイメージをSDカードに転送する方法は異なります。詳細な手順については、以下のオプションを選択してください。
Linux®
LinuxディストリビューションにUUUをインストールする
UUU GitHubのページから最新の安定ファイルをダウンロードします。UUUについてさらにサポートが必要な場合は、この広範なチュートリアルを参照してください。
uuulibusb1(apt-getまたは他のパッケージ・マネージャ経由)
NXP Linux BSPイメージをボードに書き込む
i.MX 93 EVK用の最新のビルド済みイメージは、Linuxのダウンロード・ページでLinuxの最新バージョンの項目から入手できます 。
ビルド済みのNXP Linuxバイナリ・デモ・イメージは、プロセッサの使用および評価のための標準的なシステムと基本的な機能のセットを提供します。システムを変更する必要なしに、ユーザーはハードウェアのインターフェースを評価し、SoC機能をテストし、ユーザー空間のアプリケーションを実行できます。
より柔軟性が必要な場合は、SDカードに個々のコンポーネント(ブート・ローダ、カーネル、dtbファイル、rootfsファイル)を1つずつロードするか、.wicイメージをロードして個々の部分を特定のコンポーネントで上書きします。
デフォルトでは、イメージがemmcフラッシュに書き込まれます。他のデバイスにイメージを書き込む方法については、UUU GitHubのページを参照してください。
ターミナル・アプリケーションを開き、uuuとi.MX 93 EVK用の最新のLinuxディストリビューションが格納されている場所にディレクトリを変更します。uuuファイルに実行権限を追加し、ファイルを実行します。uuuはUSBデバイスが接続されるまで待機します
$ chmod a+x uuu sudo ./uuu
.zip ボードの電源を入れると、uuuはボードへのイメージのコピーを開始します。
完了したら、ボードの電源を切ります。emmcからブートするようにボードを設定する方法については、「ブート・スイッチの設定」を参照してください。
Windows
LinuxディストリビューションにUUUをインストールする
UUU GitHubのページから最新の安定ファイルをダウンロードします。UUUについてさらにサポートが必要な場合は、この広範なチュートリアルを参照してください。
uuu.exe- シリアルUSBドライバ(お使いのボードとWindowsのインストール環境によって異なります – Windowsのデバイス・マネージャを確認してください)
NXP Linux BSPイメージをボードに書き込む
デフォルトでは、イメージがemmcフラッシュに書き込まれます。他のデバイスにイメージを書き込む方法については、UUU GitHubのページを参照してください。
コマンド・プロンプト・アプリケーションを開き、uuu.exeファイルとi.MX 93 EVK用のLinuxリリースが格納されているディレクトリに移動します。
uuu.exe _images_.zip ボードの電源を入れると、uuuはボードへのイメージのコピーを開始します。
完了したら、ボードの電源を切ります。emmcからブートするようにボードを設定する方法については、「ブート・スイッチの設定」を参照してください。
3. ビルドと実行
MCUXpressoソフトウェア開発キット (MCUXpresso SDK) は、i.MX 93 M33コアで実行される包括的なソフトウェア・ソース・コードを提供します。現時点でi.MX 93でCortex-M33を有効にしたくない場合は、このセクションをスキップできます。
3.1 概要
MCUXpresso SDKは、Cortex®-M33をスタンドアロンまたはAコアとともに使用する組込みアプリケーションの開発用に設計されています。MCUXpresso SDKは、ペリフェラル・ドライバに加えて、基本的なペリフェラルの使用例からデモ・アプリケーションまでをカバーする豊富なサンプル・アプリケーションのセットを提供します。MCUXpresso SDKには、RTOSカーネルとデバイス・スタック、および迅速な開発をサポートするさまざまなミドルウェアも含まれています。
このガイドでは、REL_2.13.0リリースで提供されているm33_image.binデモの実行方法について説明します。MCUXpresso SDKの詳細と、カスタム・デモの作成および展開方法については、MCUXpresso SDKのサイトを参照してください。
3.2 U-Bootを使用したアプリケーションの実行
このセクションでは、SDカードとi.MXプロセッサ用のビルド済みU-Bootイメージを使用してアプリケーションを実行する方法について説明します。
- セクション2「ソフトウェアの入手」の手順に従い、i.MX 93プロセッサ用のLinux BSPパッケージからのビルド済みU-Boot + Linuxイメージを格納したSDカードを用意します。すでにSDカードにLinuxイメージをロードしている場合は、この手順をスキップできます。
- SDカードをホスト・コンピュータ(LinuxまたはWindows)に挿入し、アプリケーション・イメージ(
m33_image.binなど)をSDカードのFATパーティションにコピーします。 - SDカードをPCから安全に取り外します。
- SDカードをターゲット・ボードに挿入します。デフォルトのブートSDスロットを使用していることを確認し、ブート・スイッチの設定ガイドを再確認してください。
-
ボードのDEBUG UARTコネクタをUSBケーブルでPCに接続します。Windows OSはUSBドライバを自動的にインストールし、Ubuntu OSはシリアル・デバイスも検出します。
シリアル通信アプリケーションの詳細については、「USBデバッグ・ケーブルの接続」セクションを参照してください。i.MX93 EVKボードの2番目に列挙されたシリアル・ポートの2番目のターミナルを開きます。
- これはCortex-M33のシリアル・コンソールです。速度を115200ビット/秒、8データ・ビット、1ストップ・ビット(115200、8N1)、パリティなしに設定します。
- ボードの電源を入れ、U-Bootのカウントダウンがゼロになる前に、任意のキーを押してブート・プロセスを停止します。最初のターミナルのU-Bootプロンプトで、次のコマンドを入力します。
=> fatload mmc 1:1 0x80000000 m33_image.bin => cp.b 0x80000000 0x201e0000 0x10000 => bootaux 0x201e0000これらのコマンドは、イメージ・ファイルをSDカードのパーティションからCortex-M33のTCMにコピーし、Cortex-M33のリセットを解除します。
Minicomチュートリアル
シリアル通信コンソールの設定
Linuxホスト・マシンのコマンド・プロンプトで、次のコマンドを実行してポート番号を確認します。
$ ls /dev/ttyUSB*数字の小さい方がArm® Cortex®-A55コアの番号、大きい方がArm Cortex-M33コアの番号です。
Minicom
次のコマンドを使用して、シリアル通信プログラム(例:minicom)をインストールし、実行します。
- Ubuntuパッケージ・マネージャを使用してMinicomをインストールします
- 前に確認したポート番号を使用して、コンソール・ウィンドウでMinicomを起動します
- Minicomを図のように設定します
- 次のステップは、HDMIケーブルの接続です。
$ sudo apt-get install minicom$ sudo minicom /dev/ttyUSB* -sTera Termチュートリアル
シリアル通信コンソールの設定
i.MX 93のFTDI USBシリアル・チップは、4つのシリアル・ポートを列挙します。ポートがCOM11、COM12、COM13、COM14であるとします。3番目のポート (COM13) はArm® Cortex®-A55コアからのシリアル・コンソール通信用で、4番目のポート (COM14) はArm Cortex-M33コア用です。Serial-to-USBドライバは、FTDチップ・ドライバから入手できます。
Tera Term
オープン・ソースのターミナル・エミュレーション・アプリケーションです。このプログラムは、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示します。
- Tera Termをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します
- TeraTermを起動します。初めて起動する際には、次のダイアログが表示されます。シリアル・オプションを選択します。ボードが接続されている場合は、COMポートが自動的にリスト内に表示されます
- 前に確認したCOMポート番号を使用して、シリアル・ポートを、ボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定します。この設定は[Setup(セットアップ)]->[Serial Port(シリアル・ポート)]から行うことができます
- 接続が確立されているか検証します。確立されている場合、Tera Termのタイトル・バーに次のように表示されます
- 次のステップは、HDMIケーブルの接続です
Puttyチュートリアル
シリアル通信コンソールの設定
i.MX 93のFTDI USBシリアル・チップは、4つのシリアル・ポートを列挙します。ポートがCOM11、COM12、COM13、COM14であるとします。3番目のポート (COM13) はArm® Cortex®-A55コアからのシリアル・コンソール通信用で、4番目のポート (COM14) はArm Cortex-M33コア用です。Serial-to-USBドライバは、FTDチップ・ドライバから入手できます
PuTTYは、広く利用されているターミナル・エミュレーション・アプリケーションです。このプログラムは、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示します。
- PuTTYをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- 選択したダウンロードのタイプに応じて、ダウンロードした実行ファイルをダブルクリックするか、[Start(スタート)]メニューから選択して、PuTTYを起動します。
- 起動後に表示されるウィンドウで設定を行います。[Serial(シリアル)]ラジオ・ボタンを選択し、前に確認したCOMポート番号を入力します。ボーレートも入力します。ここでは115200です。
- [Open(開く)]をクリックして、シリアル接続を確立します。ボードが接続されていて、正しいCOMポートが入力されていれば、ターミナル・ウィンドウが開きます。設定が正しくない場合は、アラートが表示されます。
- 次のステップは、HDMIケーブルの接続です。