FRDM-IMX95のスタート・ガイド
このドキュメントの内容
-
パッケージの内容
-
ソフトウェアの入手
-
ビルドと実行
-
開発者エクスペリエンス
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
お客様の FRDM i.MX 95開発ボード
1. パッケージの内容
次のセクションでは、FRDM-IMX95をブートする手順について説明します。
開発キットの内容:
- FRDM i.MX 95開発ボード (FRDM-IMX95)
- ケーブル:アセンブリ、USB Type-Cオス - Type-Cオス
- ケーブル:アセンブリ、USB Type-Cオス - Type-Aオス
- M.2モジュール:2EL M.2モジュール、Wi-Fi / Bluetooth / IEEE802.15.4(NXPのIW612搭載)
- ソフトウェア:eMMCにプログラムされたLinux BSPイメージ
- クイック・スタート・ガイド
パッケージ内容の説明ビデオを見て、FRDM-IMX95でのアプリケーションの開発を始めましょう。詳細については、i.MX 95アプリケーション・プロセッサのドキュメントをご覧ください。
1.1 ボードの概要


1.2 eMMCからのブート
FRDM-IMX95では、ビルド済みのNXP Linuxバイナリ・デモ・イメージがeMMCに書き込まれています。内部のバイナリを変更することなく、eMMCからのブートにより、Linux上で他のアプリケーションをビルドするための特定の機能を備えたデフォルトのシステムが提供されます。
NXPの組込みLinux®の詳細については、次のセクションを参照してください。
1.3 USBデバッグ・ケーブルの接続
付属のUSB Type-C - Type-Aケーブルをデバッグ用ポートJ1に接続し、ケーブルのもう一方の端をホスト・コンピュータに接続します。
4つのUART接続がホスト・コンピュータに表示されます。1つはArm® Cortex®-A55用、1つはArm Cortex-M33コア用、1つはArm Cortex-M7コアのシステム・デバッグ用です。
ターミナル・アプリケーションに慣れていない場合は、ステップ1.4に進む前に、デバッグ・ターミナルの設定のセクションを参照してください。
Linuxでデバッグする場合は、CH344 Linuxドライバ がインストールされていることを確認してください。
1.4 ブート・スイッチの設定
SW1 [1-2] はブート設定用スイッチです。デフォルトでは、ブート・デバイスはeMMC/uSDHC1です。
| ブート・デバイス | BOOT_MODE3 | BOOT_MODE2 | BOOT_MODE1 SW1-1 |
BOOT_MODE0 SW1-2 |
|---|---|---|---|---|
| シリアル・ダウンローダ | x | 0 | 0 | 1 |
| USDHC1 8ビットeMMC 5.1 | x | 0 | 1 | 0 |
| USDHC2 4ビットSD3.0 | x | 0 | 1 | 1 |
1.5 HDMIディスプレイの接続
イメージ・バイナリに付属のユーザー・インターフェースを使用するには、HDMIコネクタJ17を使用してモニタを接続します。
1.6 電源の接続
USBケーブル(Type-Cオス - Type-Cオス)を使用してUSB PDアダプタを電源コネクタJ25に接続し、スイッチSW5をオンにしてボードの電源を入れます。
プロセッサはeMMCからのブータブル・イメージの実行を開始します。その後、U-Bootの実行が自動的に開始されます。
Arm® Cortex®-A55のシリアル・コンソールに情報が表示されます。U-Bootプロセスを停止しない場合は、引き続きカーネルのブートが実行されます。
ボードが起動すると、モニタの左上隅にペンギンが表示され、左上にLinuxターミナルのアイコン、右上にタイマが表示されます。これで準備が完了しました。
2. ソフトウェアの入手
i.MX Linuxボード・サポート・パッケージ (BSP) は、特定のi.MX開発プラットフォームで組込みLinuxイメージをブートするために使用されるバイナリ・ファイル、ソース・コード、およびサポート・ファイルの集まりです。
Linuxバイナリ・デモ・ファイルの現在のリリースは、Linuxダウンロード・ページにあります。その他のドキュメントは、i.MXソフトウェアおよび開発ツールのLinuxセクションにあるi.MX Linuxドキュメント・バンドルで入手できます。
2.1 概要
FRDM-IMX95は、eMMCおよびSDカードからのブートをサポートしています。
このスタート・ガイドでは、Linux BSPイメージをSDカードに転送するいくつかの方法の概要を説明します。経験豊富なLinux開発者は、必要に応じて他のオプションを検討することができます。
2.2 NXP Linux BSPのビルド済みイメージのダウンロード
FRDM-IMX95用の最新のビルド済みイメージは、Linuxのダウンロード・ページでLinuxの最新バージョンの項目から入手できます。
ビルド済みのNXP Linuxバイナリ・デモ・イメージは、プロセッサの使用および評価のための標準的なシステムと基本的な機能のセットを提供します。システムを変更する必要なしに、ユーザーはハードウェアのインターフェースを評価し、SoC機能をテストし、ユーザー空間のアプリケーションを実行できます。
2.3 Universal Update Utility (UUU) を使用したNXP Linux BSPイメージの書き込み
パッケージの内容セクションでの接続に加えて、適切なUSBケーブルを使用してUSB1 J3をホスト・マシンに接続します。
ボードの電源を切ります。「1.4 ブート・スイッチの設定」セクションを参照し、シリアル・ダウンロード・プロトコル (SDP) モードでブートするようにボードを設定します。
ホスト・マシンで使用されているOSに応じて、Linux BSPイメージをSDカードに転送する方法は異なります。詳細な手順については、以下のオプションを選択してください。
Linux®
LinuxディストリビューションにUUUをインストールする
UUU GitHubのページ から最新の安定ファイルをダウンロードします。UUUについてさらにサポートが必要な場合は、この広範なチュートリアル を参照してください。
uuulibusb1(apt-getまたは他のパッケージ・マネージャ経由)
NXP Linux BSPイメージをボードに書き込む
デフォルトでは、イメージがSDカードに書き込まれます。他のデバイスにイメージを書き込む方法については、UUU GitHubのページ を参照してください。
ターミナル・アプリケーションを開き、FRDM-IMX95用の最新のLinuxディストリビューションとuuuが格納されている場所にディレクトリを変更します。uuuファイルに実行権限を追加し、ファイルを実行します。uuuはUSBデバイスが接続されるまで待機します。
$ chmod a+x uuu
$ sudo ./uuu -b sd_all imx-boot-imx95-15x15-lpddr4x-frdm-sd.bin-flash_all imx-image-full-imx95evk.wicFRDM-IMX95のブート・モードがシリアル・ダウンロード・モードに切り替わっていることを確認します。ボードの電源を入れると、uuuはボードへのイメージの書き込みを開始します。
完了したら、ボードの電源を切り、ターミナルを閉じます。SDカードからブートするためのボードの設定についてさらにサポートが必要な場合は、「1.4 ブート・スイッチの設定」セクションを参照してください。
Windows®
WindowsディストリビューションにUUUをインストールする
UUU GitHubのページから最新の安定ファイルをダウンロードします。UUUについてさらにサポートが必要な場合は、この広範なチュートリアル を参照してください。
uuu.exe- シリアルUSBドライバ(お使いのボードとWindowsのインストール環境によって異なります – Windowsのデバイス・マネージャを確認してください)
NXP Linux BSPイメージをボードに書き込む
デフォルトでは、イメージがSDカードに書き込まれます。他のデバイスにイメージを書き込む方法については、UUU GitHubのページ を参照してください。
コマンド・プロンプト・アプリケーションを開き、uuu.exeファイルとFRDM-IMX95用のLinuxリリースが格納されているディレクトリに移動します。
.\uuu.exe -b sd_all imx-boot-imx95-15x15-lpddr4x-frdm-sd.bin-flash_all imx-image-full-imx95evk.wicFRDM-IMX95のブート・モードがシリアル・ダウンロード・モードに切り替わっていることを確認します。ボードの電源を入れると、uuuはボードへのイメージの書き込みを開始します。
完了したら、ボードの電源を切り、ターミナルを閉じます。SDカードからブートするためのボードの設定についてさらにサポートが必要な場合は、「1.4 ブート・スイッチの設定」セクションを参照してください。
3. ビルドと実行
このセクションでは、FRDM-IMX95用のYocto BSPイメージをビルドする方法について簡単に説明します。
3.1 FRDM-IMX95用Yocto BSP
FRDM-IMX95 BSPリリースは、i.MXファミリ用Linux BSPリリースとともに四半期ごとにリリースされます。ソース・コードからFRDM-IMX95イメージをビルドするには、まずi.MX Yoctoプロジェクトのユーザー・ガイドをお読みになり、YoctoプロジェクトとYoctoのビルドについて理解してください。その後、以下の手順に従ってFRDM-IMX95用のイメージをビルドしてください。ここでは、例としてLF6.12.49_2.2.0 BSPを使用します。
1. 最新のi.MXファミリ用Linux BSPリリースをダウンロード:
$ repo init -u https://github.com/nxp-imx/imx-manifest -b imx-linux-walnascar -m imx-6.12.49-2.2.0.xml
$ repo sync2. Yoctoプロジェクトのセットアップ:
$ MACHINE=imx95-15x15-lpddr4x-frdm DISTRO=fsl-imx-xwayland source imx-setup-release.sh -b frdm-imx953. イメージのビルド:
$ bitbake imx-image-full4. SDカードのイメージの書き込み:
$ zstdcat imx-image-full-imx95-15x15-lpddr4x-frdm.rootfs.wic.zst | sudo dd of=/dev/sdx bs=1M && syncまたは、uuuを使用してSDカードにイメージを書き込む場合:
$ uuu -b sd_all imx-image-full-imx95-15x15-lpddr4x-frdm.rootfs.wic.zst5. ブート・スイッチSW1[1:2]を「11」に切り替えてSDカードからのブートを選択したら、SDカードを挿入してFRDM-IMX95ボードの電源を入れます。
4. 開発者エクスペリエンス
NXPでは、あらゆるスキル・レベルのユーザーが開発を迅速化できるように、プラットフォームのさまざまな特長や機能に基づく広範なサンプル・アプリケーションを提供しています。
4.1 アプリケーション・コード・ハブ
アプリケーション・コード・ハブ (ACH) リポジトリでは、NXPの社内エキスパートが開発したマイクロコントローラおよびプロセッサのソフトウェア・サンプル、コード・スニペット、アプリケーション・ソフトウェア・パック、デモなどを簡単に見つけることができます。このスペースでは、マイクロコントローラおよびプロセッサのアプリケーションをすばやく簡単に一貫した方法で検索できます。
ACHには、特定のアプリケーションをすばやく見つけるためのフィルタと検索のオプションがあります。Git機能のサポートにより、ユーザーの開発環境でアプリケーションを簡単にインポートして使用できます。
ACHの詳細については、こちらのリンクをご覧ください。
利用可能なFRDM-IMX95向けアプリケーション・サンプルを見つけるには、下図に示すように、デバイス・ファミリで「i.MX」を選択してください。
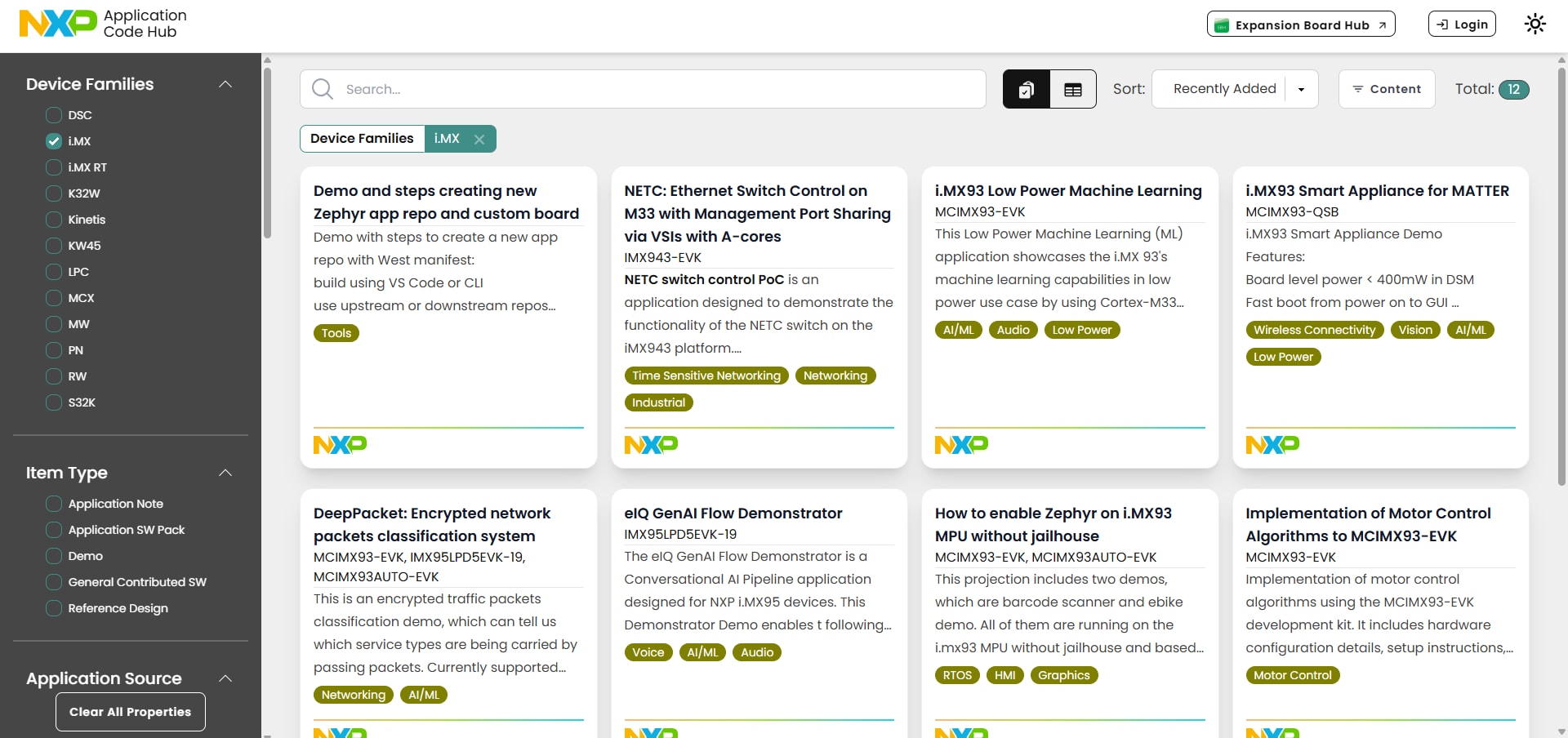
それぞれのアプリケーション・サンプルを選択して、詳細を確認してください。
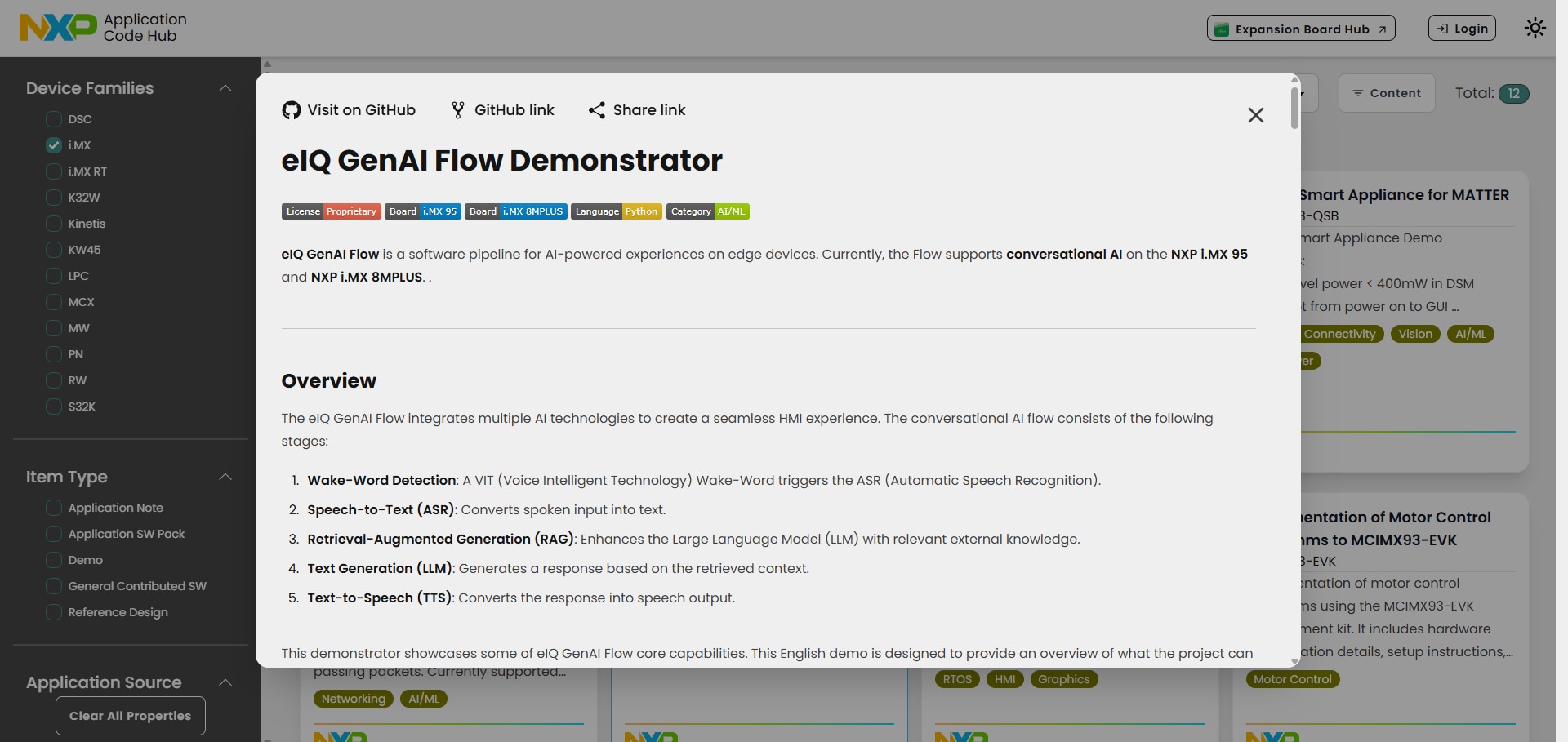
各サンプル・アプリケーションのソース・コードを取得するには、画面上部の[Visit on GitHub(GitHubにアクセス)]ボタンをクリックして、NXP GitHubのコード・リポジトリにアクセスします。

4.2 i.MXアプリケーション・プロセッサ用GoPoint
i.MXアプリケーション・プロセッサ用GoPointは、Linux BSPに含まれているビルド済みアプリケーションを起動するためのユーザー・フレンドリーなアプリケーションで、i.MX SoCのさまざまな機能をすばやく実際に体験してみることができます。GoPointは、高度な機能に加え、GitHub で提供されているアプリケーション用のソース・コードとビルド・レシピを使用して、実装のための実用的なソリューションを提供します。
GoPointの詳細については、こちらのリンクをご覧ください。
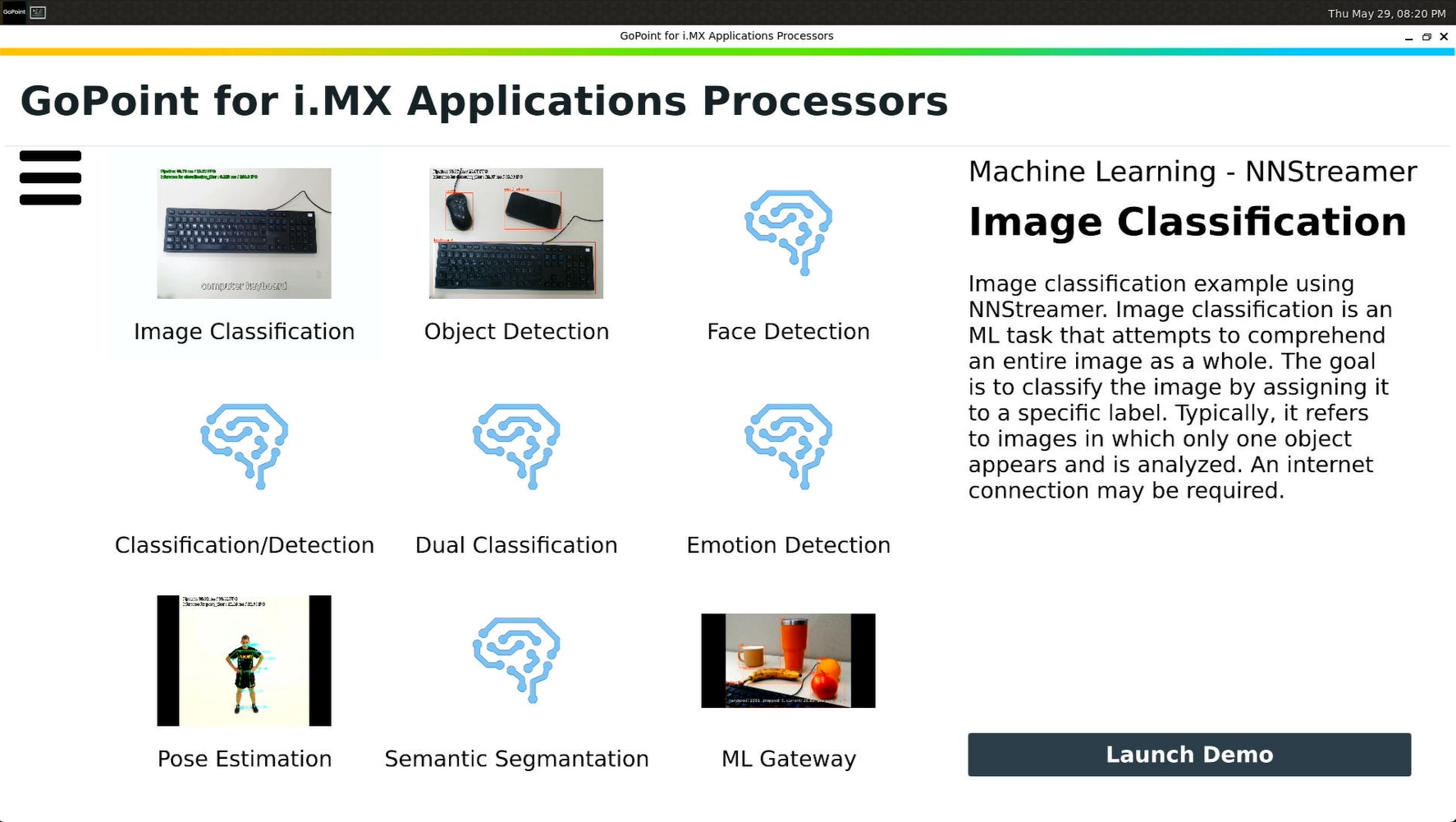
FRDM-IMX95の場合、GoPointはデフォルトでBSPリリースに含まれています。GoPoint GUIランチャーを開くには、FRDM-IMX95が起動した後、以下に示すように画面の左上隅に表示される[GoPoint]をクリックします。

利用可能なサンプル・アプリケーションは、各アプリケーションのスクリーンショットのアイコンとともに表示されています。サンプル・アプリケーションを選択すると、右側にそのサンプル・アプリケーションの簡単な説明が表示されます。選択されているアプリケーションを起動するには、[Launch Demo(デモを起動)]ボタンをクリックします。
アプリケーションの起動後は、ランチャーに表示される[Stop Current Demo(現在のデモを停止)]ボタンをクリックすることで、デモを強制終了できます 。
各アプリケーションの使用方法の詳細については、i.MXアプリケーション・プロセッサ向けGoPointのユーザー・ガイドを参照してください。
1. デバッグ・ターミナルの設定
Linuxのデバッグ・ターミナル
シリアル通信コンソールの設定
Linux用USBシリアル・ドライバは、CH344 Linuxドライバ から入手できます。
Linuxホスト・マシンのコマンド・プロンプトで、次のコマンドを実行してポート番号を確認します。
ls /dev/ttyCH343USB*ポートのうち1つはArm® Cortex®-M7用、1つはArm® Cortex®-A55用、1つはArm® Cortex®-M33用です。
Minicom
次のコマンドを使用して、Minicomプログラムをインストールし、実行します。
- Ubuntuパッケージ・マネージャを使用してMinicomをインストールします
- 事前に確認したポート番号を使用して、コンソール・ウィンドウでMinicomを起動します
$ sudo apt-get install minicom$ sudo minicom /dev/ttyCH343USB * -s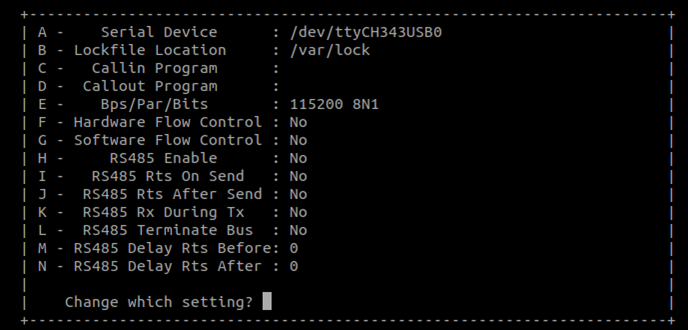
図に示すようにMinicomを設定し、設定を終了します。
Windowsのデバッグ・ターミナル
シリアル通信コンソールの設定
FRDM-IMX95のWCH USBコンバータ・チップは、4つのシリアル・ポートを列挙します。ポートのうち1つはArm® Cortex®-M7からのシリアル・コンソール通信用、1つはArm® Cortex®-A55用、1つはArm® Cortex®-M33用です。USBシリアル・ドライバは、CH344 Windowsドライバ から入手できます。
Tera Term
Tera Termは、オープン・ソースのターミナル・エミュレーション・アプリケーションです。このプログラムは、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示します。
- Tera Termをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- Tera Termを起動し、シリアル・オプションを選択します。ボードが接続されている場合は、COMポートが自動的にリスト内に表示されます。
- 事前に確認したCOMポート番号を使用して、シリアル・ポートをボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定します。この設定は[Setup(セットアップ)]>[Serial Port(シリアル・ポート)]から行うことができます。
- 接続が確立されているか検証します。
PuTTY
PuTTYは、広く利用されているターミナル・エミュレーション・アプリケーションです。このプログラムは、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示します。
- PuTTYをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- 選択したダウンロードのタイプに応じて、ダウンロードした実行ファイルをダブルクリックするか、[Start(スタート)]メニューから選択して、PuTTYを起動します。
- 起動後に表示されるウィンドウで設定を行います。[Serial(シリアル)]ラジオ・ボタンを選択し、前に確認したCOMポート番号を入力します。ボーレートもあわせて指定します。今回は「115200」を入力します。
- [Open(開く)]をクリックして、シリアル接続を確立します。ボードが接続されていて、正しいCOMポートが入力されていれば、ターミナル・ウィンドウが開きます。設定が正しくない場合は、アラートが表示されます。
2. Cortex-M7の使用
Cortex-M7の使用
FRDM-IMX95には、リアルタイムかつ低消費電力のプロセッシングに使用できる、最大800 MHzで動作する汎用Arm® Cortex®-M7が1つ搭載されています。Cortex-M7コア上でプログラムをビルドして実行する方法については、アプリケーション・ノートAN14748「i.MX 95のM7コアでアプリケーションを実行する方法」を参照してください。
Cortex-M7コアで実行されるプログラムのデバッグ方法については、アプリケーション・ノートAN14120「i.MX 8M、i.MX 8ULP、およびi.MX 9でのVS Codeを使用したCortex-Mのデバッグ」を参照してください。
3. NPUへのMLモデルの実装
FRDM-IMX95は、ニューラル・ネットワークの機械学習推論を高速化するために、最大2TOPSで動作するニューラル・プロセッシング・ユニット (NPU) を搭載しています。NPUのハードウェア・アーキテクチャの詳細については、i.MX 95アプリケーション・プロセッサ・リファレンス・マニュアルを参照してください。NPUのソフトウェア・アーキテクチャの詳細については、i.MX機械学習ユーザー・ガイドを参照してください。
モデルの量子化
NPUでの高速化を実現するには、ニューラル・ネットワークの演算子を8 ビット(符号なし/符号付き)に量子化する必要があります。モデルの量子化については、最新のeIQツールキットをダウンロードし、ユーザー・ガイドを確認してください。
モデルの変換
NPUでの高速化を実現するには、量子化されたモデルをNeutronコンバータ・ツールを使用して変換する必要があります。最新のNeutronコンバータ・ツールは、eIQツールキットのページからダウンロードできるeIQ Neutron SDKに含まれています。i.MX95のモデルを変換するには、eIQ Neutron SDKのユーザー・ガイドに従ってください。
モデル推論
NNモデルのNPUでのパフォーマンスを評価するには、Linux BSPのbenchmark_modelツールを使用するのが最も簡単な方法です。このツールは、入力としてランダム・データを使用し、指定された実行回数の平均推論時間を提供します。以下に例を示します。
root@imx95frdm:~# /usr/bin/tensorflow-lite-2.19.0/examples/benchmark_model --graph=/usr/bin/tensorflow-lite-2.19.0/examples/mobilenet_v1_1.0_224_quant_converted.tflite $ --external_delegate_path=/usr/lib/libneutron_delegate.soNPUでモデル推論を実行するためのコードをc++およびpythonで記述する方法については、GoPoint のアプリケーション・サンプルを参照してください。
4. System Managerの使用
System Managerの使用
FRDM-IMX95には、SM (System Manager) の実行専用に、最大333 MHzで動作するArm® Cortex®-M33が1つ搭載されています。SMはNXPが提供するアプリケーションで、SoC内の他のプロセッサ用に低レベルのリソースを管理することを目的としています。
Cortex-M33はブート・コアとしてブートROMを実行し、SM(およびその他のブート・コード)がロードされた後はSMに分岐します。次に、SMは分離メカニズムなどいくつかのハードウェア機能を設定してから、システム内の他のコアを起動します。これらのコアを起動した後はサービス・モードに入り、Armのシステム制御および管理インターフェース(System Control and Management Interface:SCMI) に基づくクライアントRPC APIを介して、クロック、電源、センサ、およびピン制御にアクセスできるようになります。コア間の分離を容易にするために、SMはSoCを複数の論理マシン (LM) へと分割します。各LMは、ハードウェアとRPC API呼び出しの両方に対して、静的に設定可能なアクセス権を持ちます。
SMはGitHub imx-sm リポジトリ内にソース形式で提供され、お客様はニーズに合わせてコードを自由に変更および再コンパイルできます。ただし、SMの機能を拡張するために変更を加える場合は、その対象をお客様のボード層に限定することを推奨します。SMの機能を拡張する場合は、アプリケーション・ノートAN14478「ボード制御によるi.MX 9 System Manager機能の拡張」を参照してください。
5. VPUの使用
VPUの使用
FRDM-IMX95は、H.264、H.265 4Kp30のデコードをサポートするデコーダとH.264、H.265 4Kp30のエンコードをサポートするエンコーダを含むビデオ処理ユニット (VPU) を備えています。
VPUをテストする最も簡単な方法は、次のコマンドを使用してMP4ビデオ・ファイルを再生することです。
root@imx95frdm:~# gplay-1.0 MP4_EXAMPLE_FILE.mp4gplay-1.0は、VPUを自動的にビデオ・デコーダとして選択し、WestonデスクトップでMP4ファイルを再生します。接続されている場合は、HDMIディスプレイでビデオを再生できます。
アプリケーションでVPU APIを使用する方法の詳細については、i.MX VPU APIリファレンス・マニュアルをご覧ください。
6. ISPの使用
ISPの使用
FRDM-IMX95は、500 Mpixel/s MIPI-CSIおよびISP(4レーン x 2、2.5 Gbps/レーン)、PHY内蔵(DSIとのmux x 1)のカメラインターフェイスを備え、最大4Kp60fps x 1、4Kp30 x 2、1080p60 x 4、または1080p30 x 8の MIPI仮想チャネル対応カメラをサポートします。
ISPをテストするには、FRDM-IMX95でEXPI-S08A20カメラを使用できます。
u-boot=> setenv fdtfile imx95-15x15-frdm-os08a20-isp.dtb
u-boot=> bootOS08A20カメラを接続した状態でFRDM-IMX95がブートされたら、次のコマンドを実行して環境を設定し、OS08A20のカメラ・プレビューを開きます。
root@imx95frdm:~# export LIBCAMERA_IPA_MODULE_PATH=/usr/lib/libcamera/ipa
root@imx95frdm:~# export LIBCAMERA_PIPELINES_MATCH_LIST='nxp/neo,uvc'
root@imx95frdm:~# export LIBCAMERA_IPA_CONFIG_PATH=/usr/share/libcamera/ipa
root@imx95frdm:~# export CAMERA0="/base/soc/bus@42000000/i2c@42540000/os08a20_mipi@36"
root@imx95frdm:~# gst-launch-1.0 libcamerasrc camera-name="${CAMERA0}" ! video/x-raw, width=3840, height=2160, format=YUY2 ! queue ! waylandsinkHDMIディスプレイにカメラのプレビューとして正しい映像が表示されれば、ISPは正常に動作しています。
ISPの使用の詳細については、i.MX 95カメラ移植ガイドを参照してください。
7. GPUの使用
GPUの使用
FRDM-IMX95は、最大60 GFLOPS(高精度)で動作するMali-G310グラフィックス・プロセッシング・ユニット (GPU) を備えており、OpenGL ES 3.2、OpenCL 3.0、Vulkan 1.2をサポートしています。
GPUのパフォーマンスをテストする最も簡単な方法は、次のコマンドでglmark2-es2-waylandベンチマークを実行することです。
root@imx95frdm:~# glmark2-es2-wayland --fullscreenこの他にも、FRDM-IMX95のデフォルトのrootfsにインストールされている多くのGPUサンプル・アプリケーションが/opt/imx-gpu-sdk/フォルダにあります。バイナリを直接実行するか、GoPointからアプリケーションを起動して試すことができます。
GPUの使用の詳細については、i.MXグラフィックス・ユーザー・ガイドをご覧ください。
8. 高速ブート
高速ブート
特定のユース・ケースでは、デバイスのブート時間の要件があります。これは、デバイスのブートを所定の時間内に完了させる必要があることを意味します。
ブート時間を最適化するために、FRDM-IMX95はU-BootのFalconモードをサポートしています。FalconモードはU-Bootの機能で、SPLがLinuxカーネルを直接起動できるようにすることで高速ブートを可能にします。U-Bootのロードと初期化を完全にスキップし、ブートローダで費やされる時間を短縮する効果があります。
Falconモードを有効にしてブート時間を最適化する方法については、アプリケーション・ノートAN14093「Falconモードとカーネル最適化を使用したi.MX 8Mおよびi.MX 9での高速ブート」を参照してください。