EVモータ制御開発キット
このドキュメントの内容
-
パッケージの内容
-
ソフトウェアの入手
-
接続
-
ビルドと実行
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
お客様の S32K396 BLDC/PMSM開発キット
1. パッケージの内容
NXPのMCSPTR2AK396低電圧モータ制御開発キットは、S32K396車載マイクロコントローラを使用して低電圧モータ制御アプリケーションを開発するお客様向けに設計されています。
このページでは、S32K396 (MCSPTR2AK396) を使用した3相永久磁石同期モータ制御開発キットをセットアップして使用する手順について説明します。
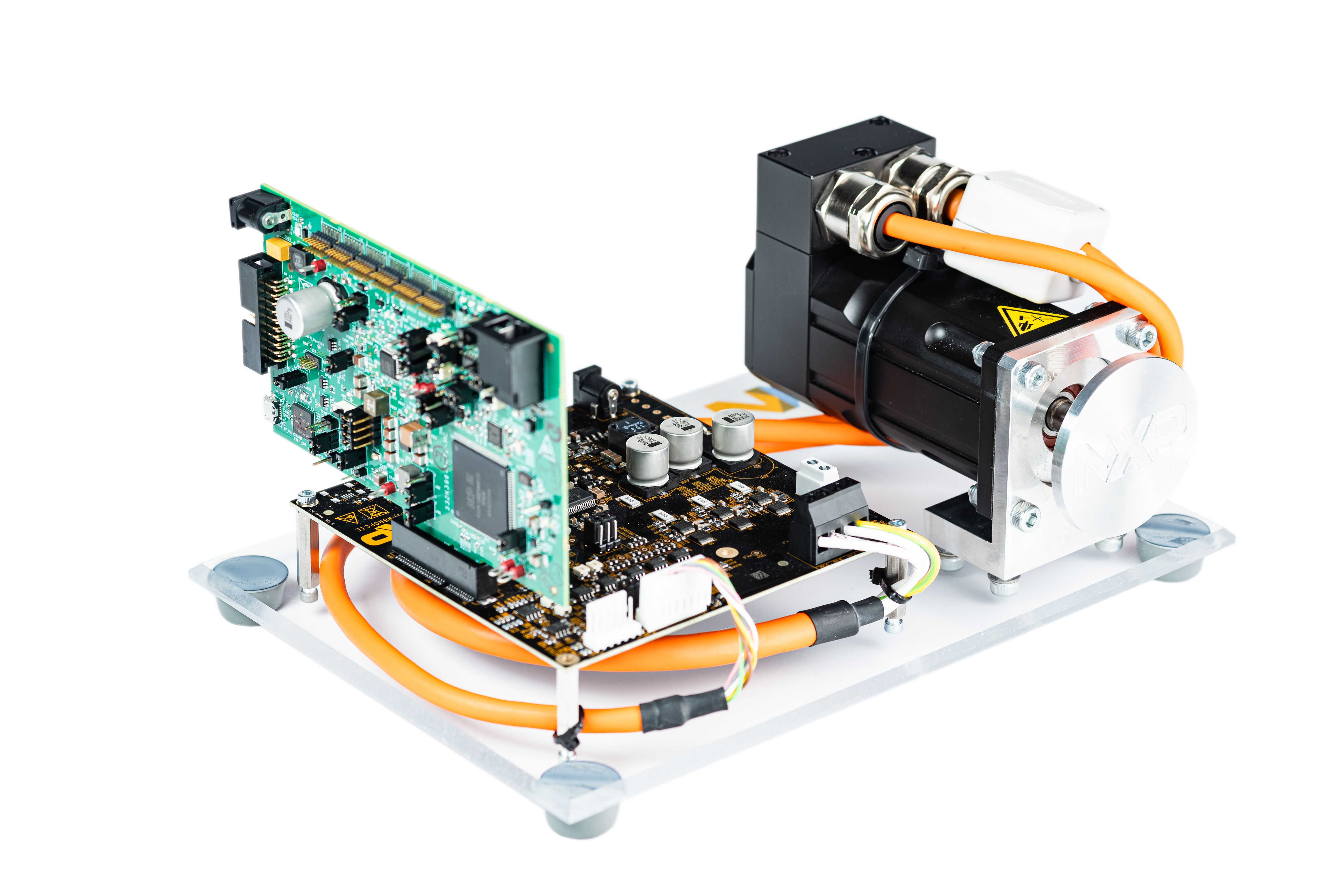
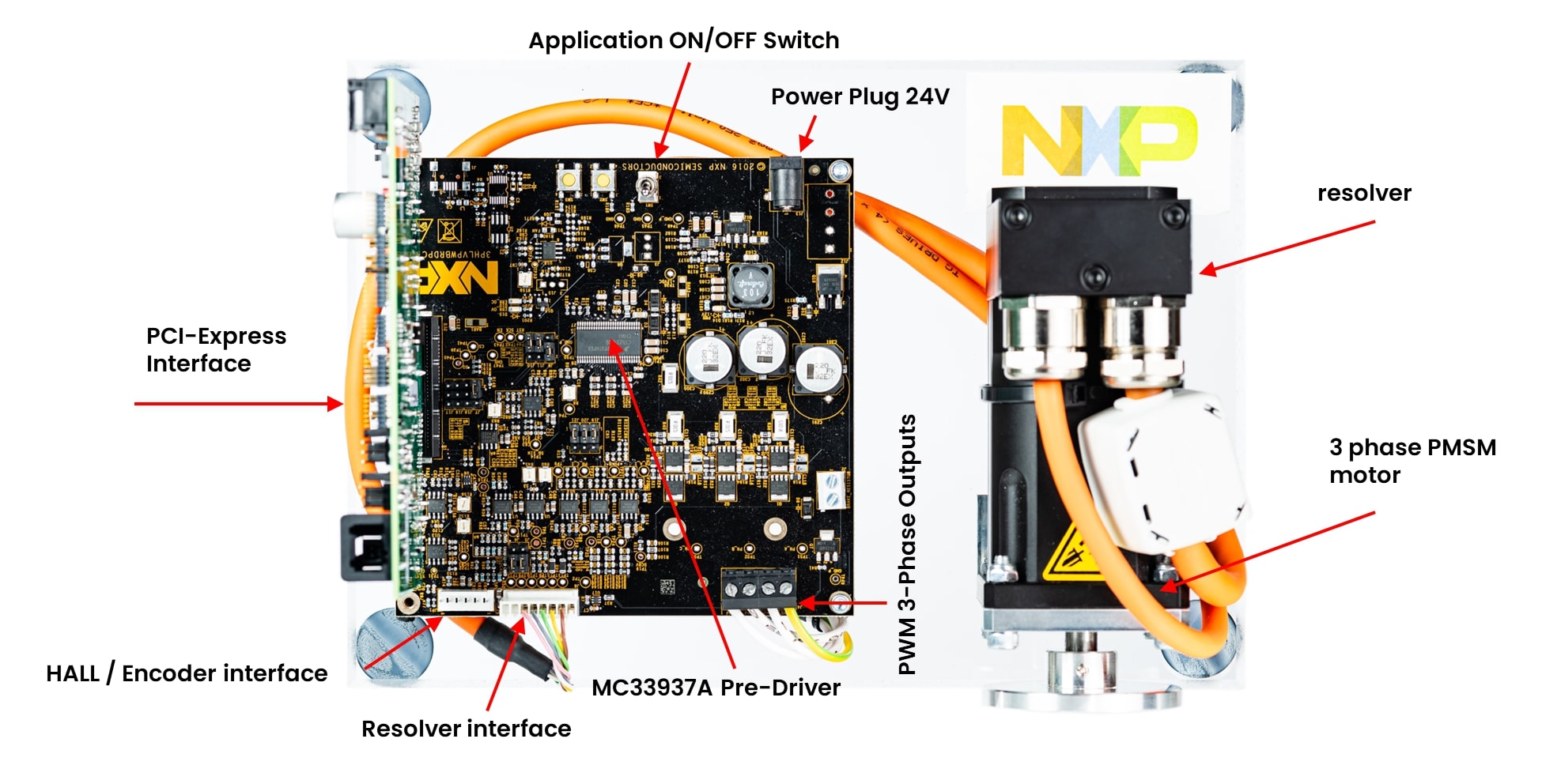
1.1 MCSPTR2AK396の概要

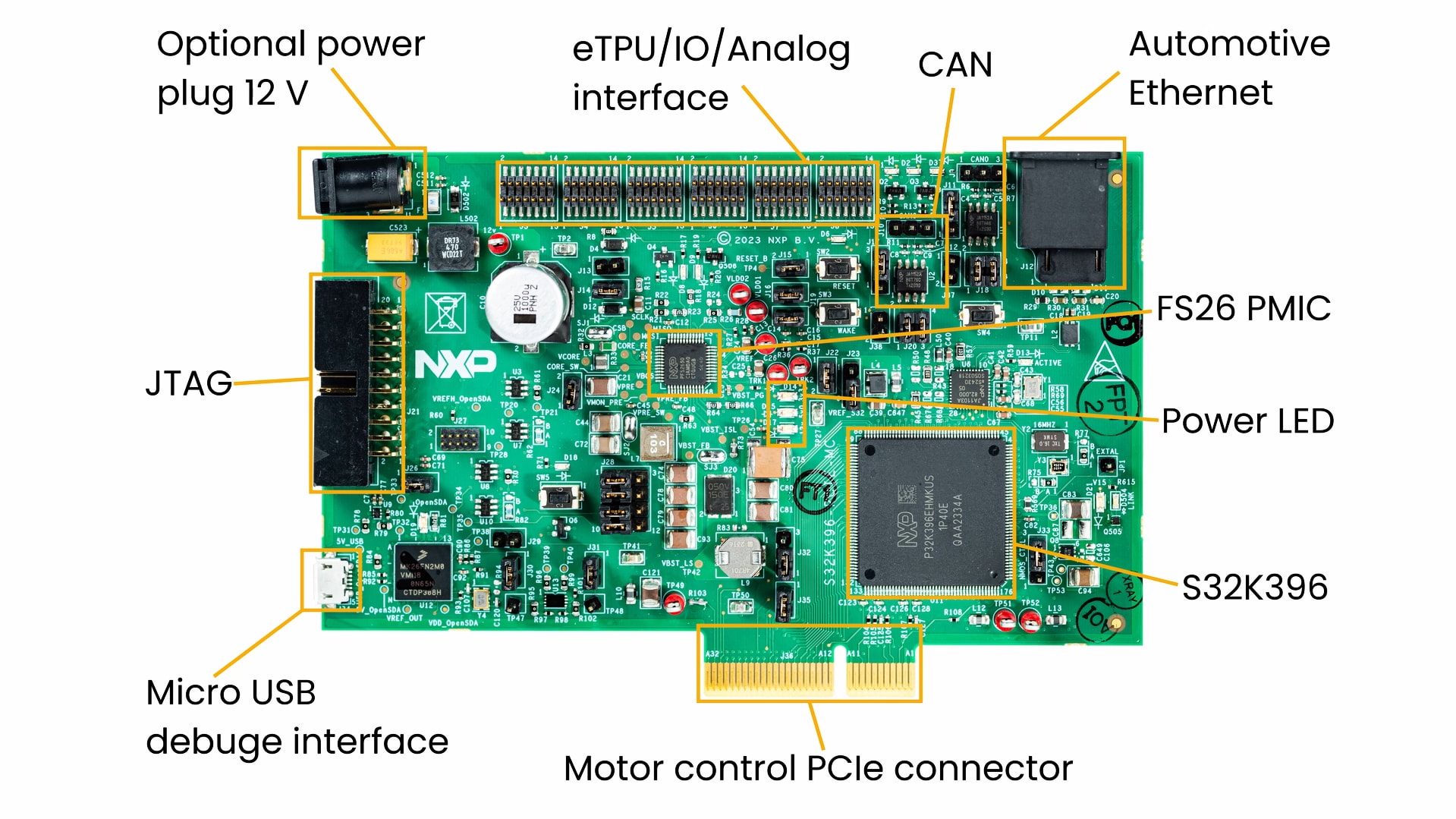
- S32K396-PCIeコントローラ・ボード
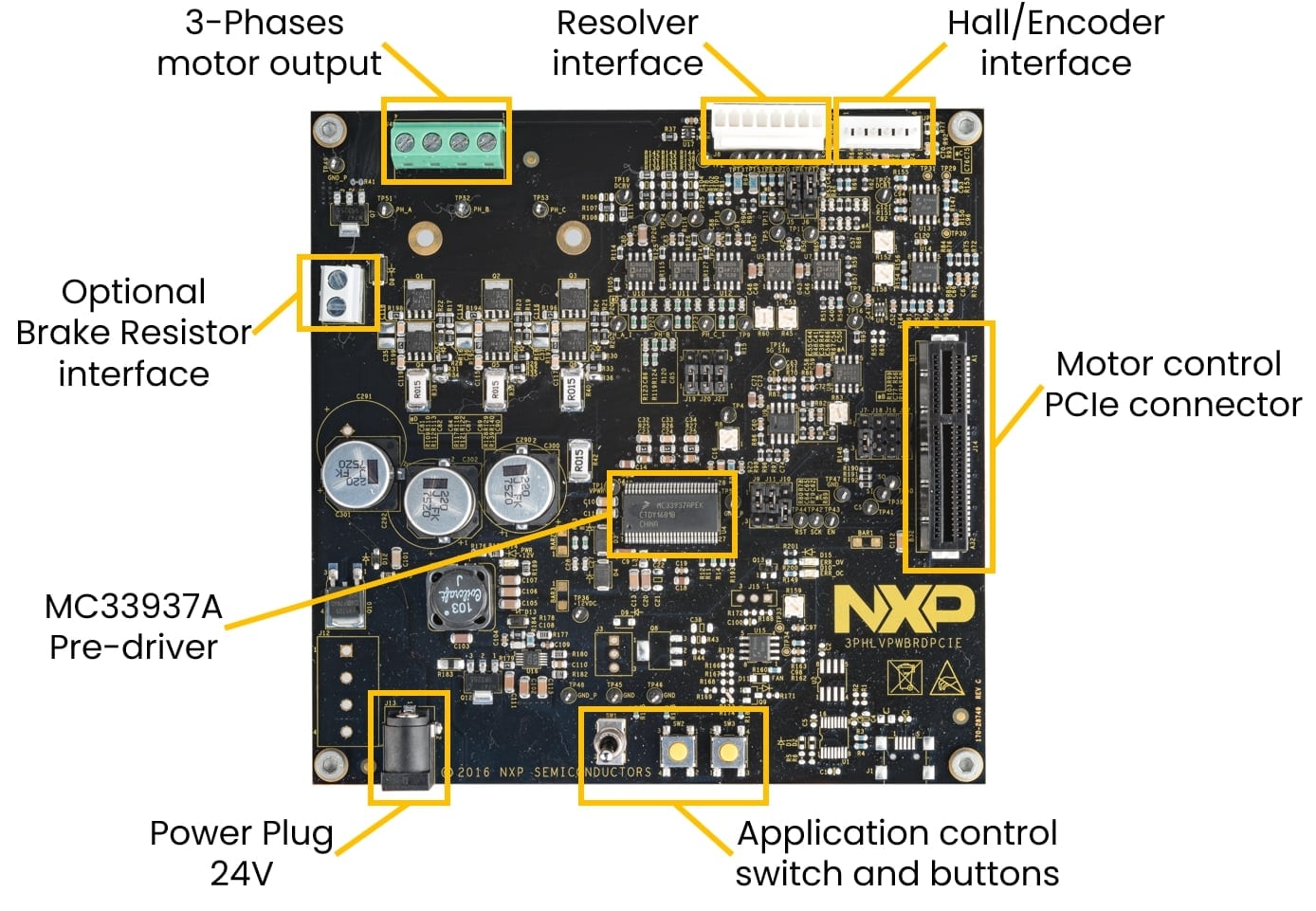
- MC33937Aプリドライバ集積回路に基づく3相PMSM/BLDC低電圧パワー・ステージ
- マイクロUSBケーブル
- +24 VDC電源
- ユニバーサル・アダプタ
- PSE電源コード
- 3相PMSMモータ、レゾルバ付き、1相あたり30 V、3000 RPM、0.32 Nm、95 W、5.2 A

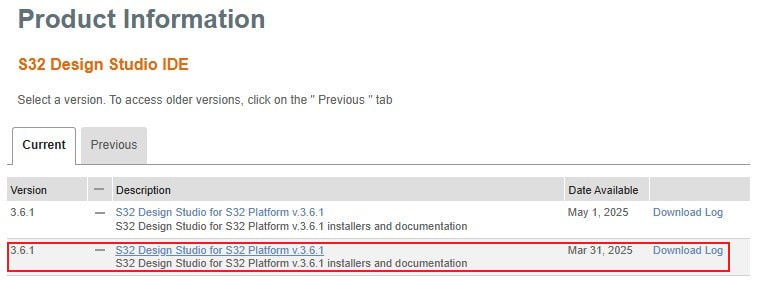
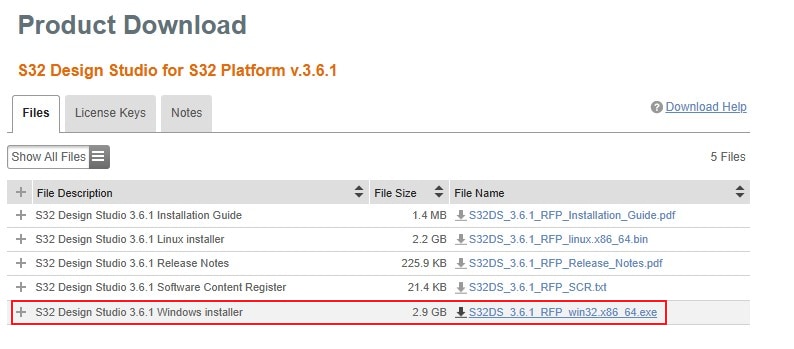
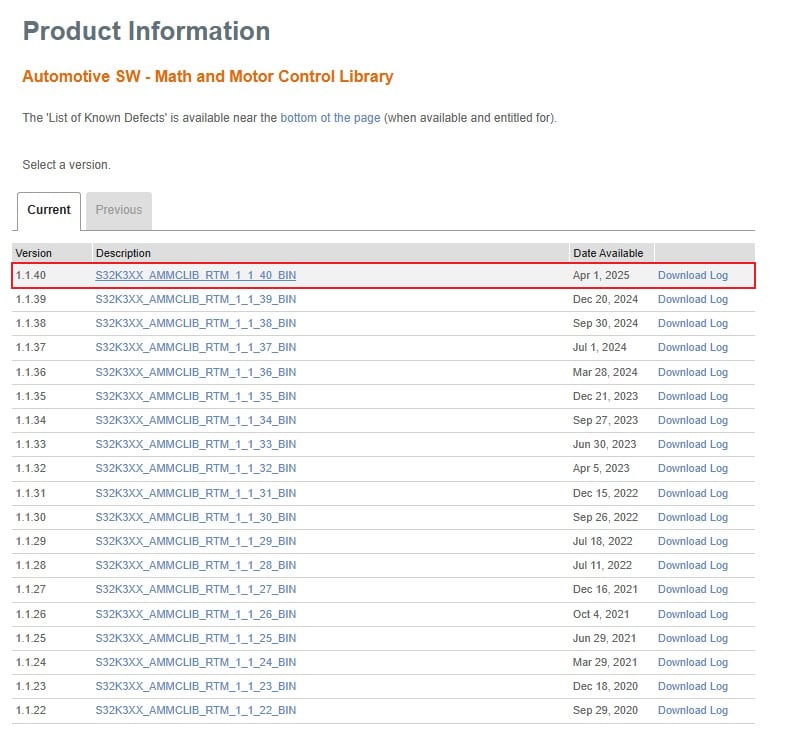
2. ソフトウェアの入手
資格情報を使用してNXPにサインインします 。
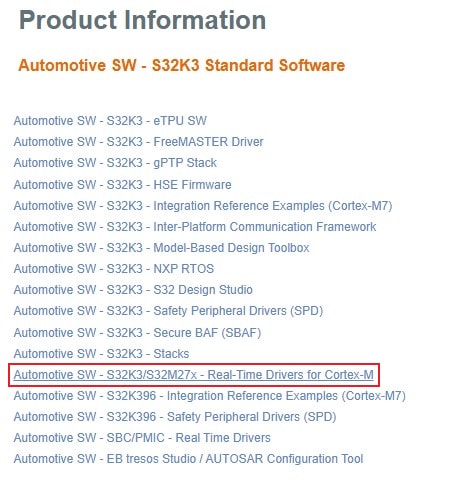
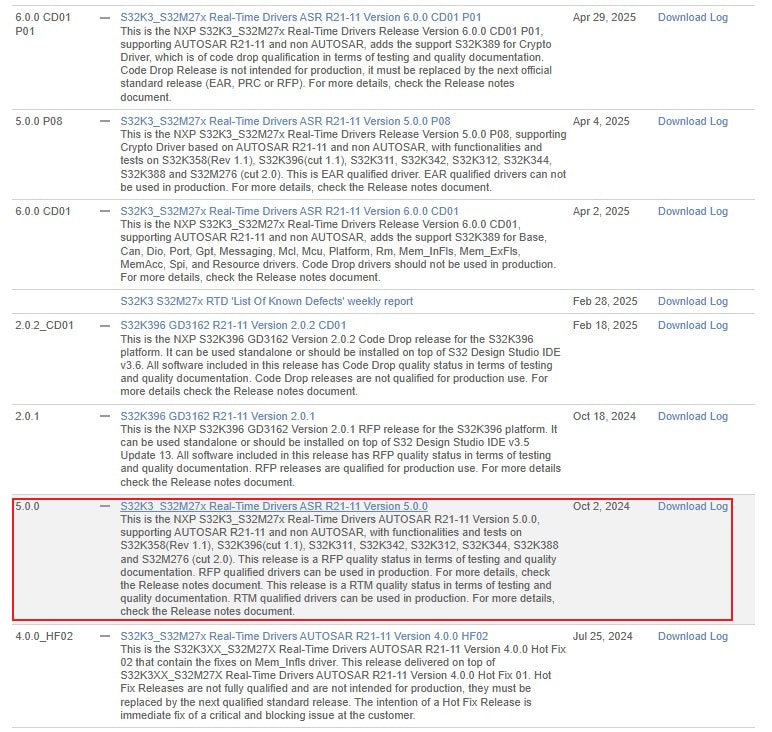
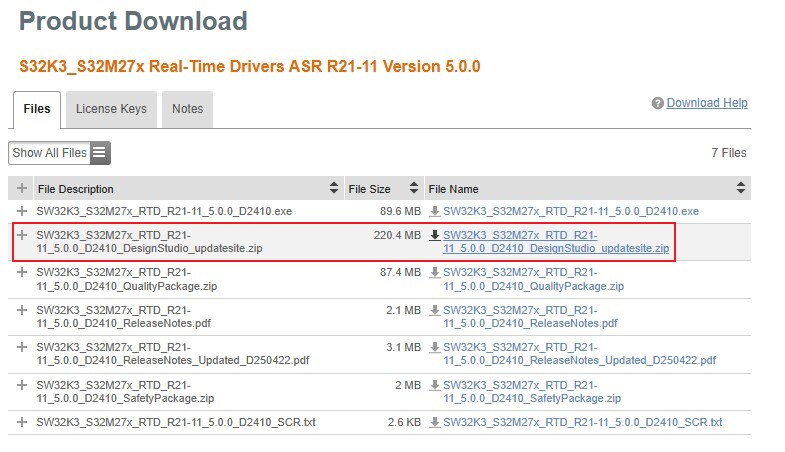
2.3 RTDドライバのインストール
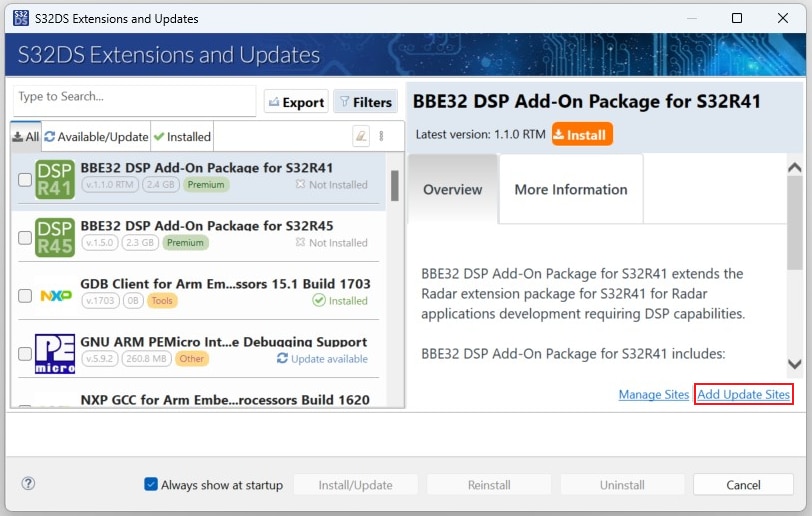
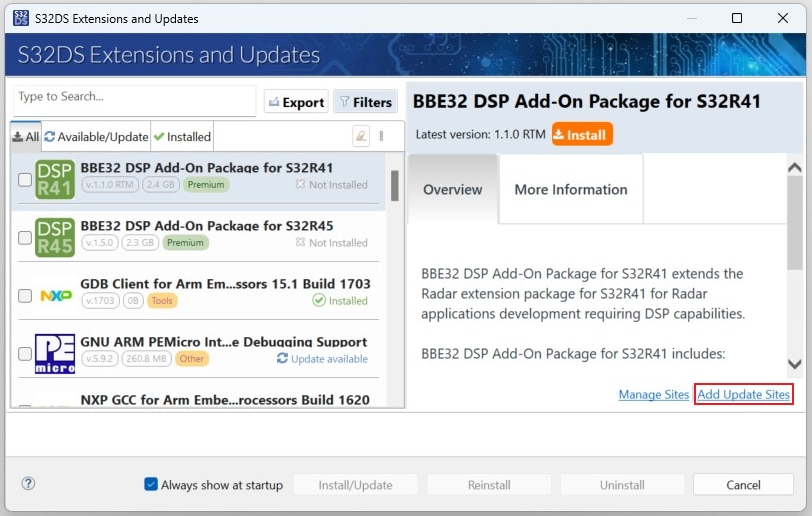
S32DSで、トップメニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
[Add Update Sites(更新サイトを追加)]をクリックし、ダウンロードしたRTD *.zipファイルを参照します。
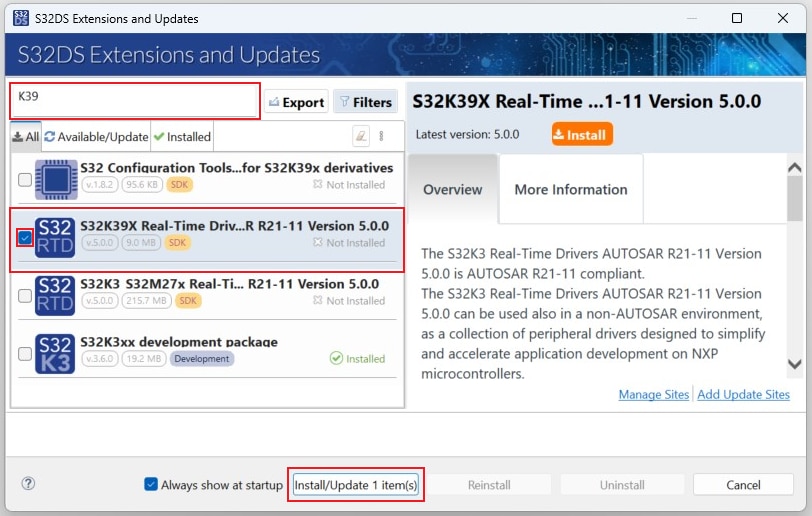
S32K39X Real-Time Drivers ASR R21-11 Version 5.0.0を検索して選択し、インストールします。

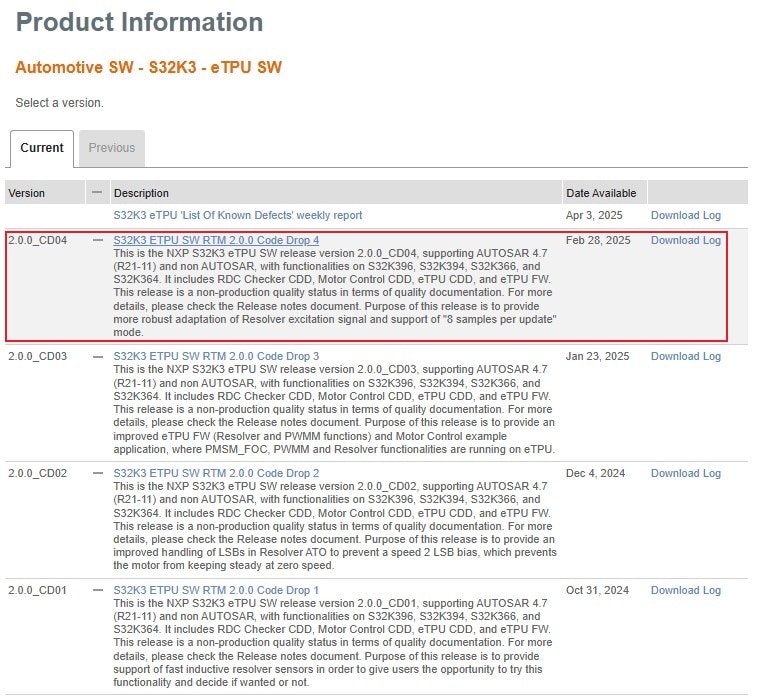
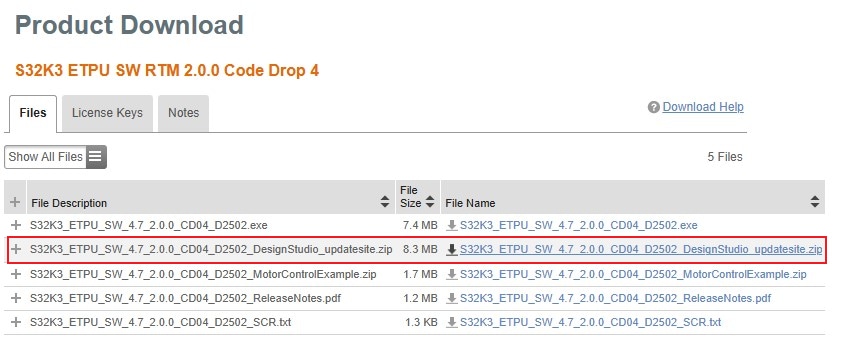
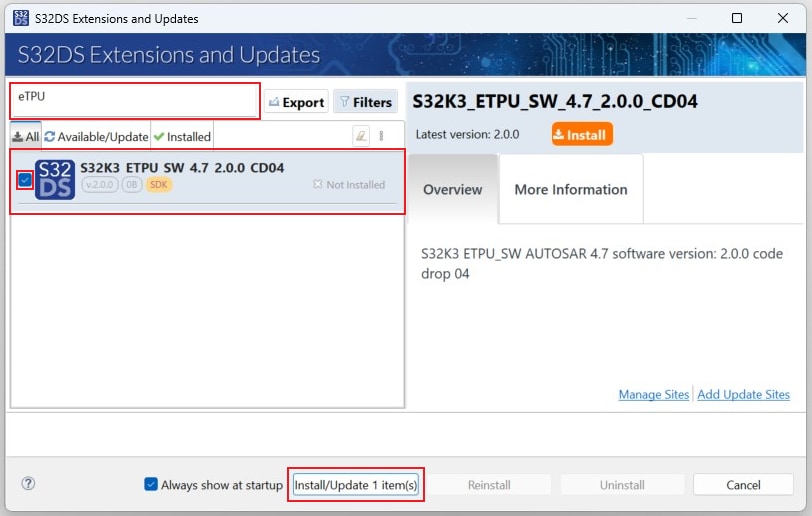
2.5 eTPU SWのインストール
S32DSで、トップメニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
[Add Update Sites(更新サイトを追加)]をクリックし、ダウンロードしたeTPU SW更新サイト・ファイルを参照します。
eTPU SWを選択してインストールします。
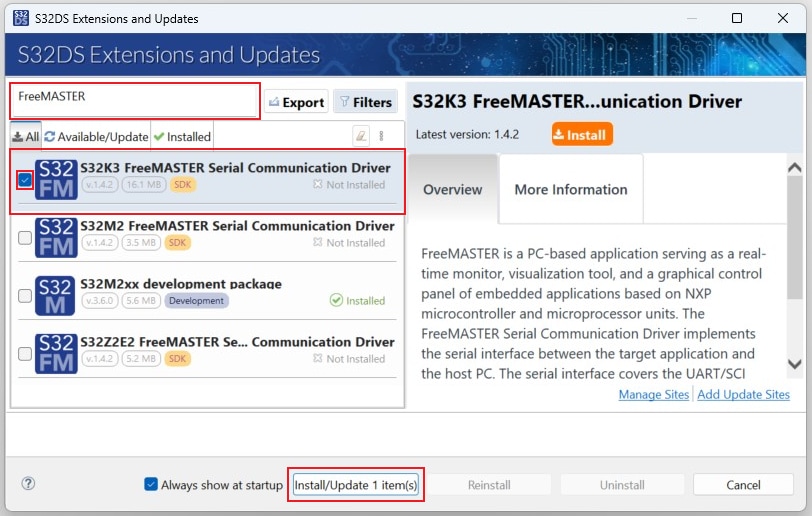
2.6 FreeMASTER通信ドライバのインストール
S32DSで、トップメニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
FreeMASTER通信ドライバを選択してインストールします。
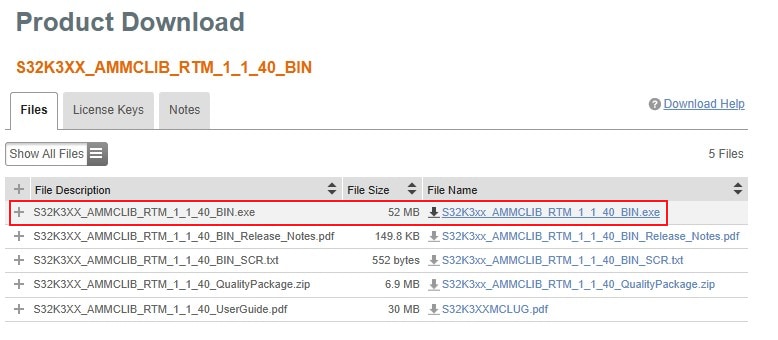
2.9 MCSPTR2AK396モータ制御アプリケーション・ソフトウェアの入手
MCSPTR2AK396モータ制御アプリケーション・ソフトウェアをダウンロードしてインストールします。
問題がある場合、AMMCLibをインストールしてから、EV-INVERTERGEN3モータ制御アプリケーション・ソフトウェアを再インストールしてください。これにより、次のプロジェクトを簡単にインポートできるようになります(最新のAMMCLibへのパスが更新済みとなります)。
3. 接続
3.1 デフォルトのジャンパ位置の確認
3PHLVPWBRDPCIEパワー・ステージ・ボードのデフォルトのジャンパ位置の確認
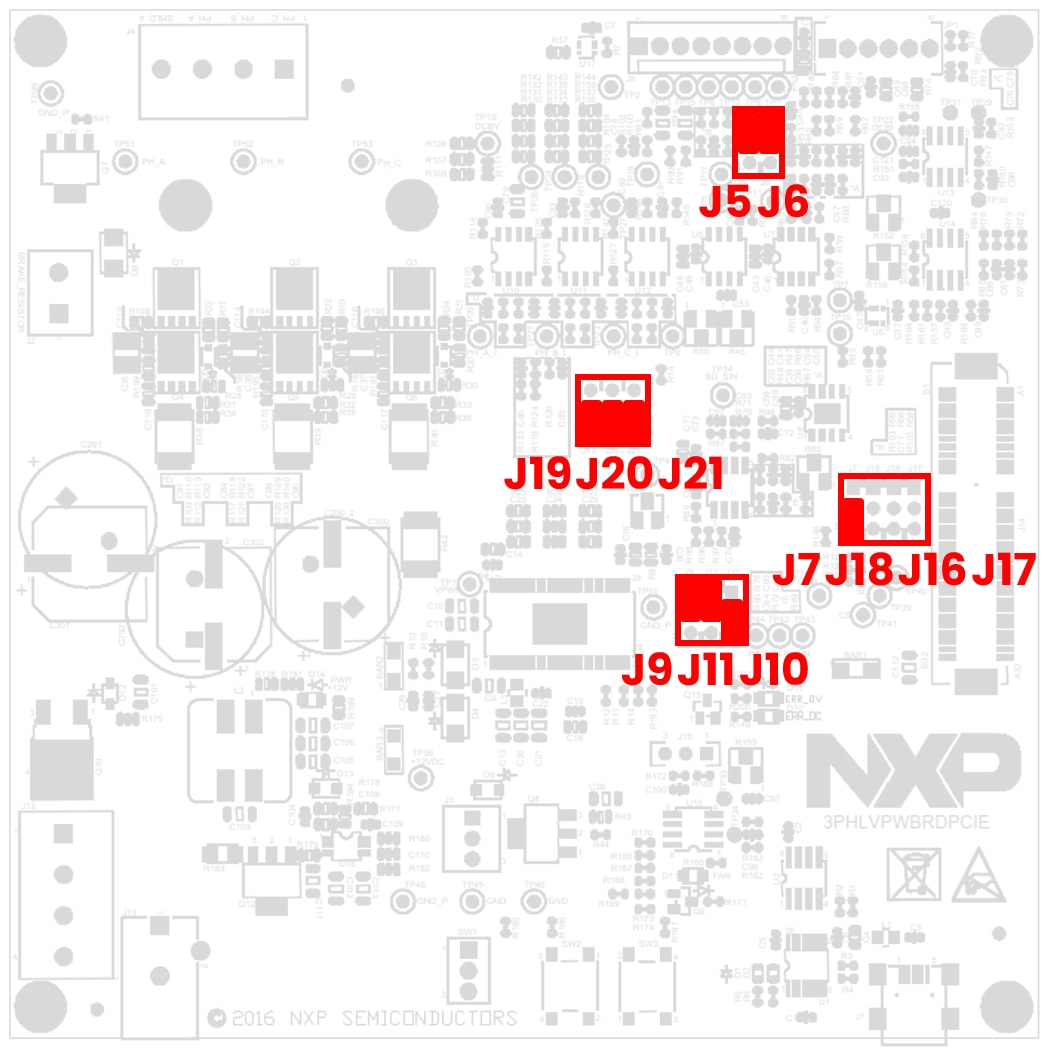
| 3PHLVPWBRDPCIEのデフォルトのジャンパ設定 | ||
|---|---|---|
| ジャンパ | 状態 | 備考 |
J5 |
2-3 | レゾルバS4の出力をオペアンプにルーティング |
J6 |
2-3 | レゾルバS3の出力をオペアンプにルーティング |
J7 |
2-3 | PCIeコネクタのTM5信号からのレゾルバ励起信号 |
J9 |
1-2 | オペアンプを介してDC BUS電流検出信号を測定 |
J10 |
2-3 | 過電流しきい値ポテンショメータの電圧源としてのVREF |
J11 |
1-2 | 外部過電流故障のコンパレータ |
J16 |
開 | ゼロ・クロス検出切断 |
J17 |
開 | ゼロ・クロス検出切断 |
J18 |
開 | ゼロ・クロス検出切断 |
J19 |
1-2 | A相の電流信号をPCIeコネクタのAN1信号にルーティング |
J20 |
1-2 | B相の電流信号をPCIeコネクタのAN3信号にルーティング |
J21 |
1-2 | C相の電流信号をPCIeコネクタのAN5信号にルーティング |
S32K396-PCIE-MCコントローラ・ボードのデフォルトのジャンパ位置を確認します
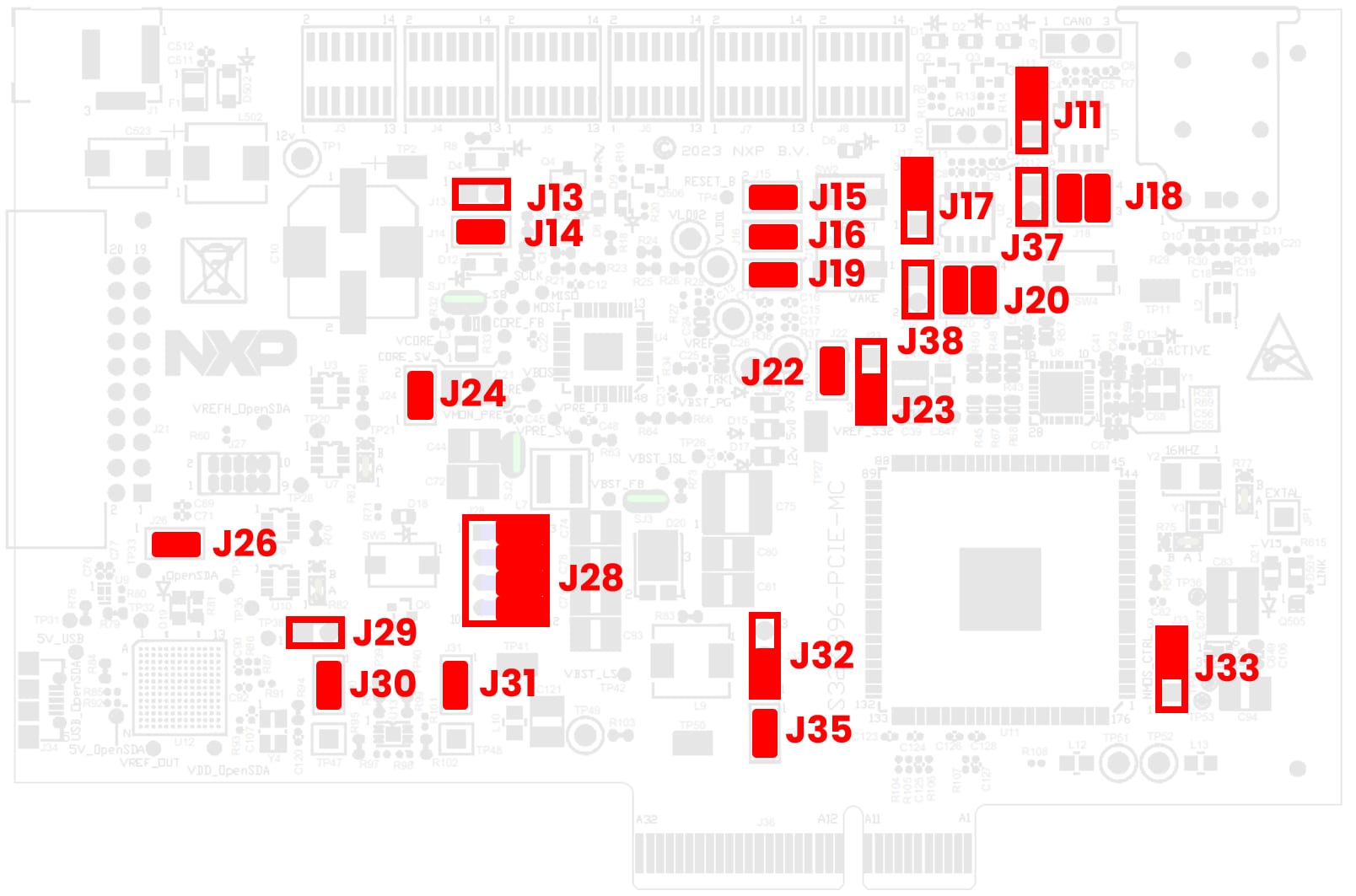
| S32K396-PCIE-MCのデフォルトのジャンパ設定 | ||
|---|---|---|
| ジャンパ | 状態 | 備考 |
J11 |
2-3 | CAN0トランシーバSTB信号をプルダウン |
J13 |
開 | FS26_VDEBUG信号を生成 - FS26がデバッグ・モードで起動 |
J14 |
閉 | FS26_VDEBUG信号をVBOS信号から派生 |
J15 |
閉 | RESET SW2をRESET_B信号に接続 |
J16 |
閉 | 外部ウェイクアップ信号をMCUに接続 |
J17 |
2-3 | CAN3トランシーバSTB信号をプルダウン |
J18 |
1-2、3-4 | CAN0_TXおよびCAN0_RX信号をオンボードCANトランシーバにルーティング |
J19 |
閉 | 機能安全信号FS0BおよびFS1Bを接続 |
J20 |
1-2、3-4 | CAN3_TXおよびCAN0_RX信号をオンボードCANトランシーバにルーティング |
J22 |
閉 | RESET_B信号をウェイクアップ信号としてFS26に接続 |
J23 |
2-3 | VHREF_H電圧をVDD_HV_Aに接続 |
J24 |
閉 | RESET_B信号を20ピンJTAGコネクタに接続 |
J26 |
閉 | 20ピンJTAGコネクタにVDD_JTAG信号が存在 |
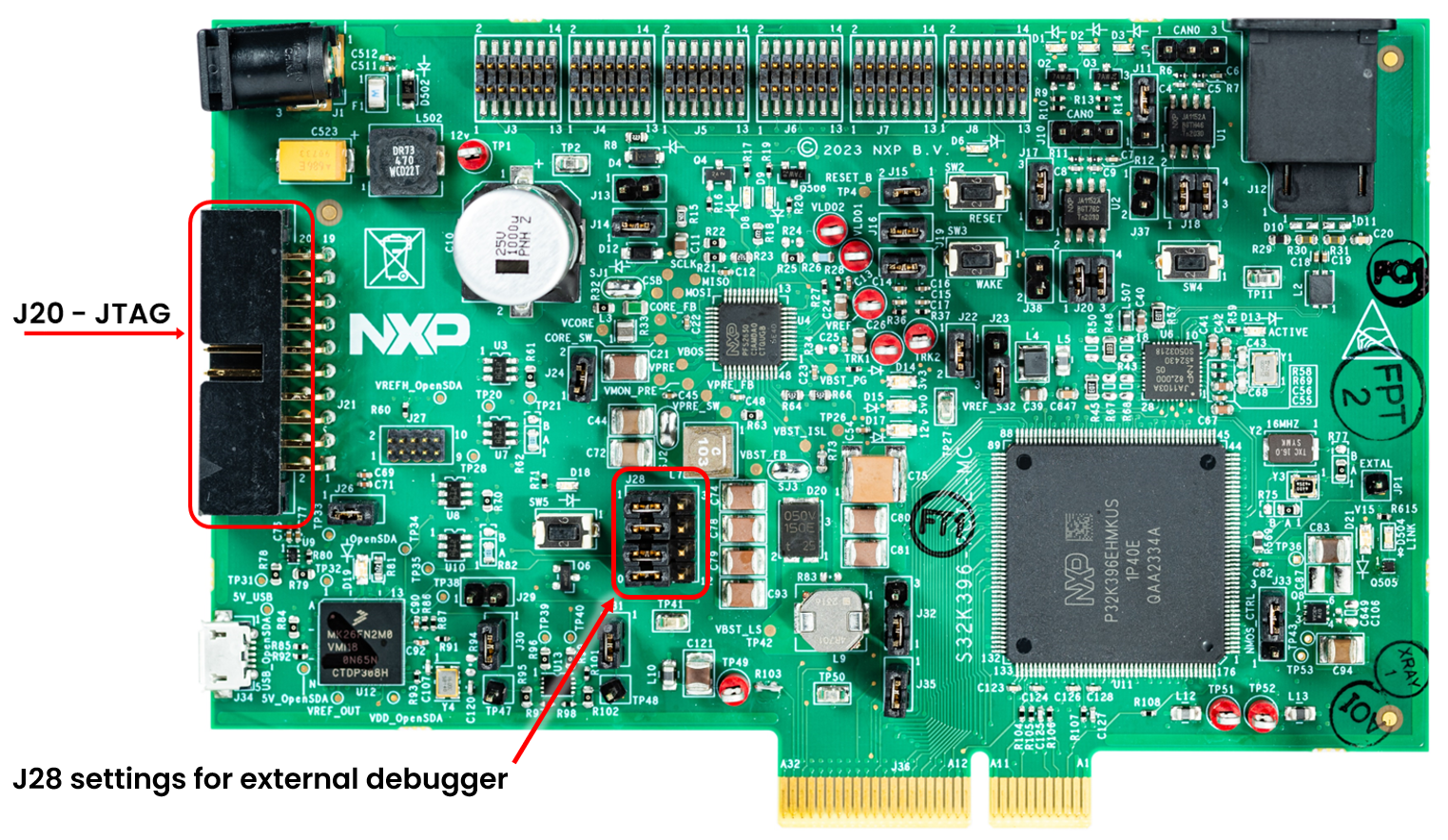
J28 |
2-3、5-6、8-9、11-12 | JTAG信号をS32K3オンボード・デバッガにルーティング |
J29 |
開 | 外部RESET信号ピン |
J30 |
閉 | LPUART2_TX信号をS32K3オンボード・デバッガに接続 |
J31 |
1-2 | LPUART2_RX信号をS32K3オンボード・デバッガに接続 |
J32 |
1-2 | 正弦波発生器1をPCIeコネクタのTM5信号にルーティング |
J33 |
2-3 | V15電圧を外部NMOSトランジスタで調整 |
J35 |
閉 | PTB11をPCIeコネクタのTM3信号に接続 |
J37 |
開 | CAN0トランシーバSTB信号はMCUに非接続 |
J38 |
1-2 | CAN3トランシーバSTB信号はMCUに非接続 |
J20コネクタを介して外部JTAGデバッグ・プローブを使用する場合は、J28の設定を1-2、4-5、7-8、10-11に変更します。
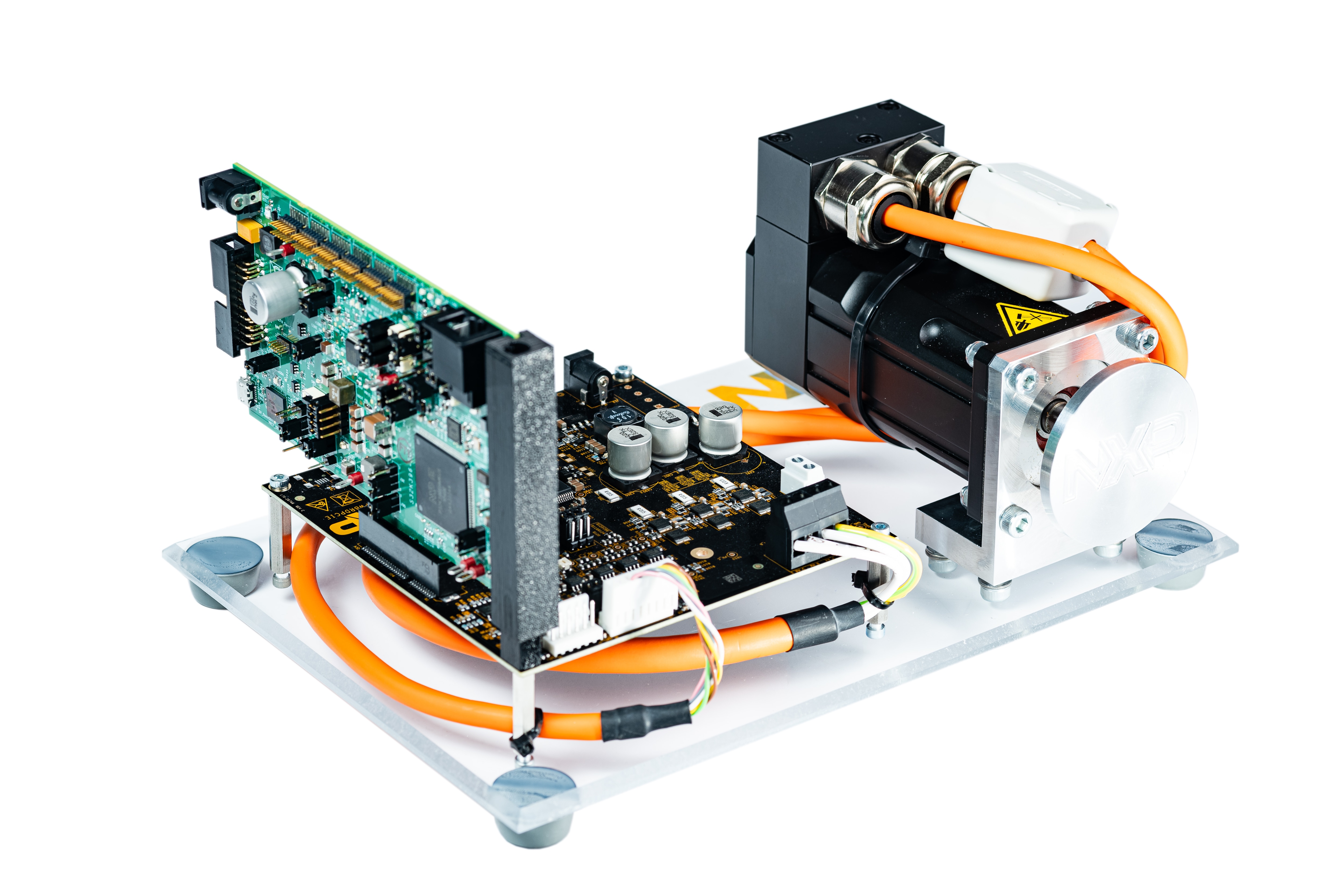
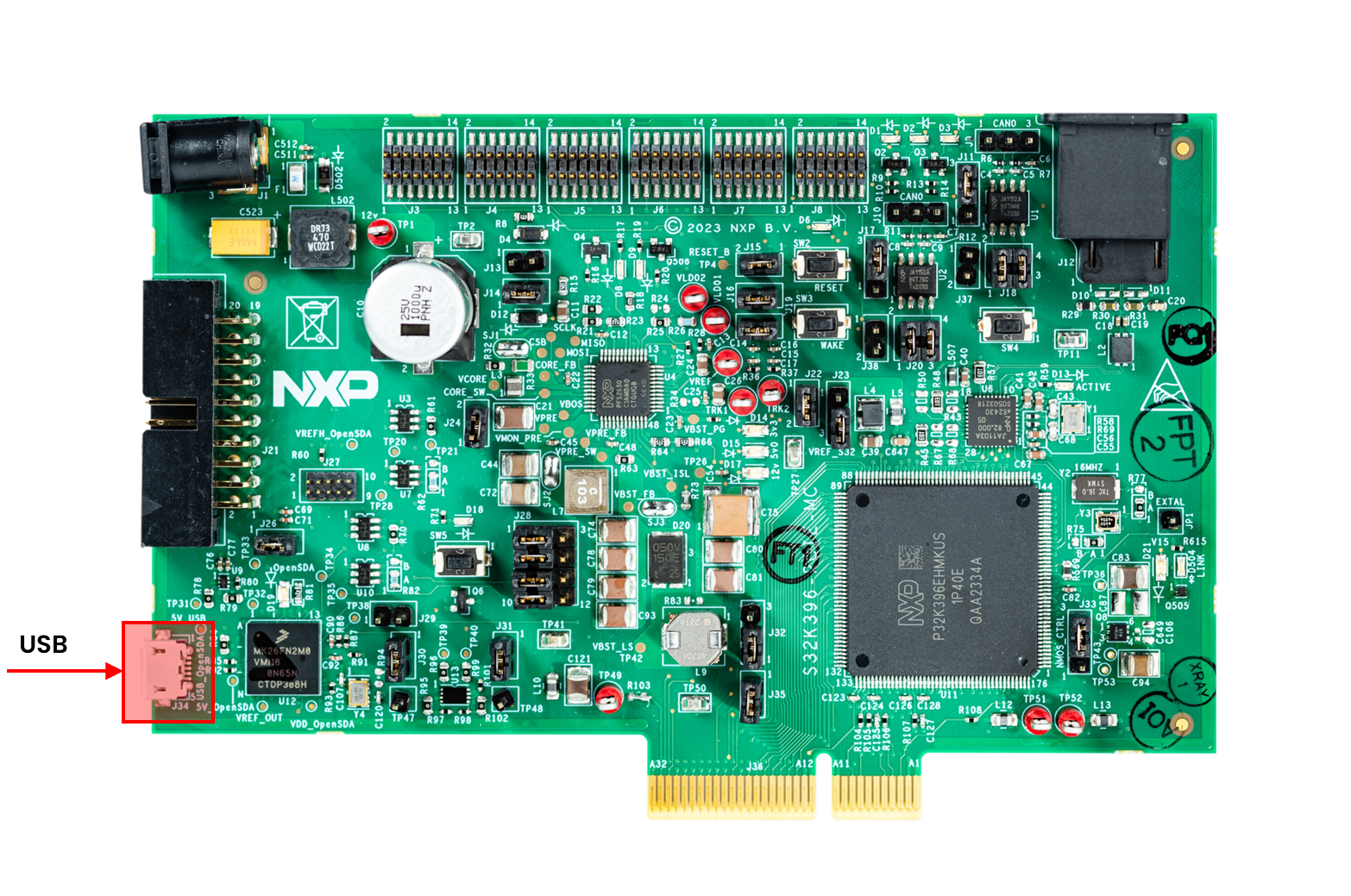
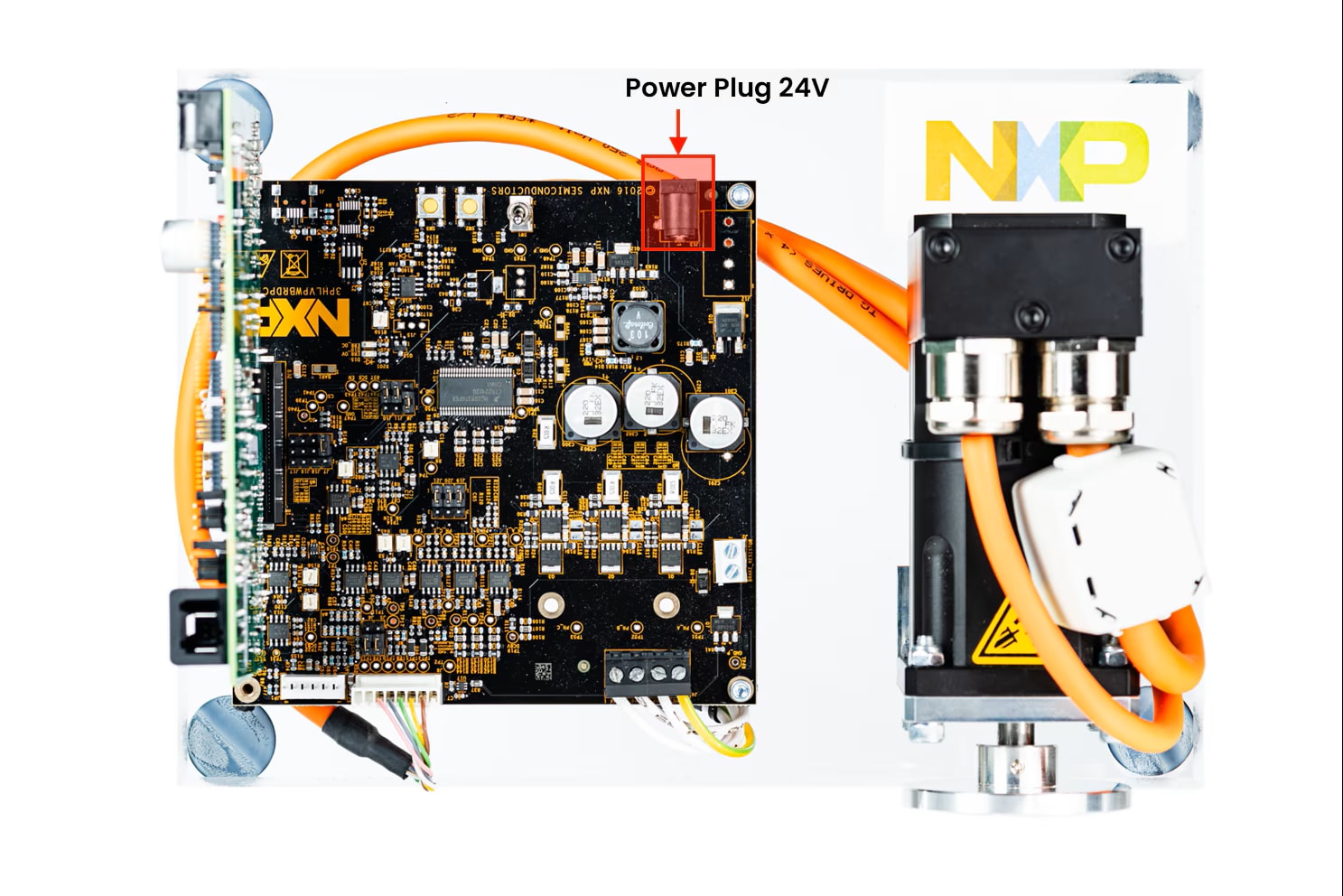
3.2 ボードの組み立て
コントローラ・ボードをパワー・ステージ・ボードに取り付けるには、micro USBケーブルを使用してボードをPCに接続します
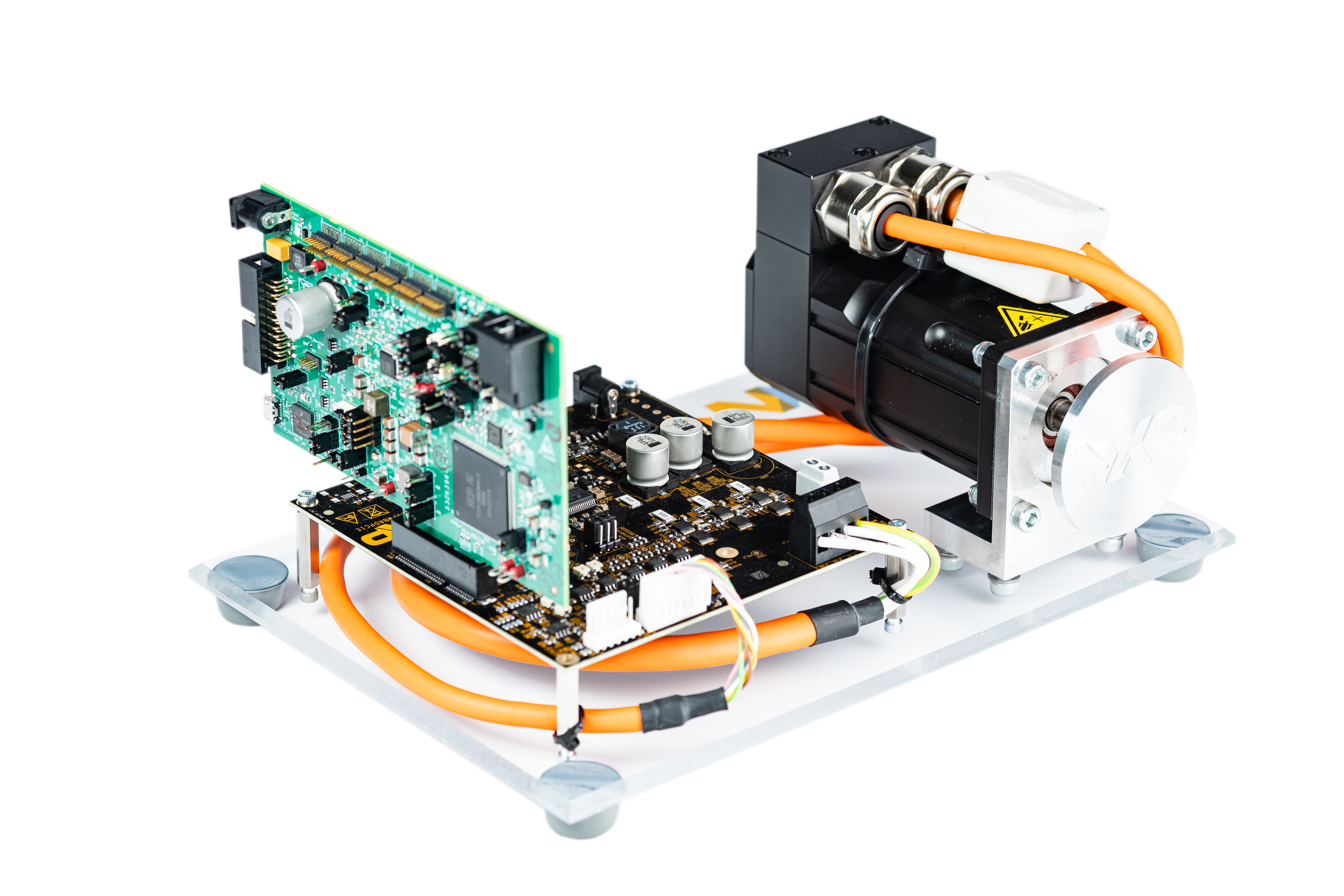
必要に応じて、機械的堅牢性を高めるために支柱を使用します
4. ビルドと実行
MCSPTR2AK396モータ制御キットを実際に使ってみましょう。
4.1 アプリケーションの選択とプロジェクトのインポート
インストール・ディレクトリで適切なPMSMモータ制御アプリケーションを選択します。
NXP\MC_DevKits\MCSPTR2AK396 インストールされているアプリケーション・ソフトウェア・プロジェクトをS32 Design Studio IDE for S32 Platformにインポートするには、次の手順に従います。
- S32DS for S32 Platformを起動します。
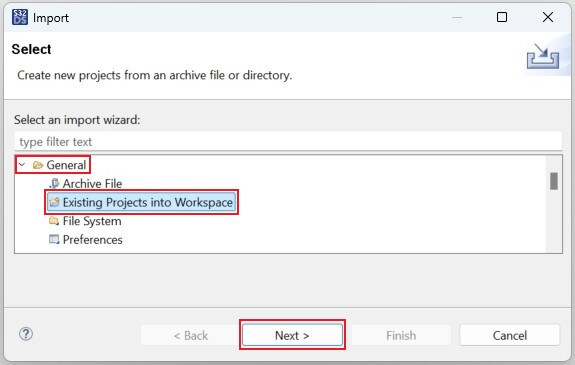
- [File(ファイル)]>[Import(インポート)]に移動し、[General(全般)]>[Existing Projects into Workspace(既存プロジェクトをワークスペースへ)]を選択します
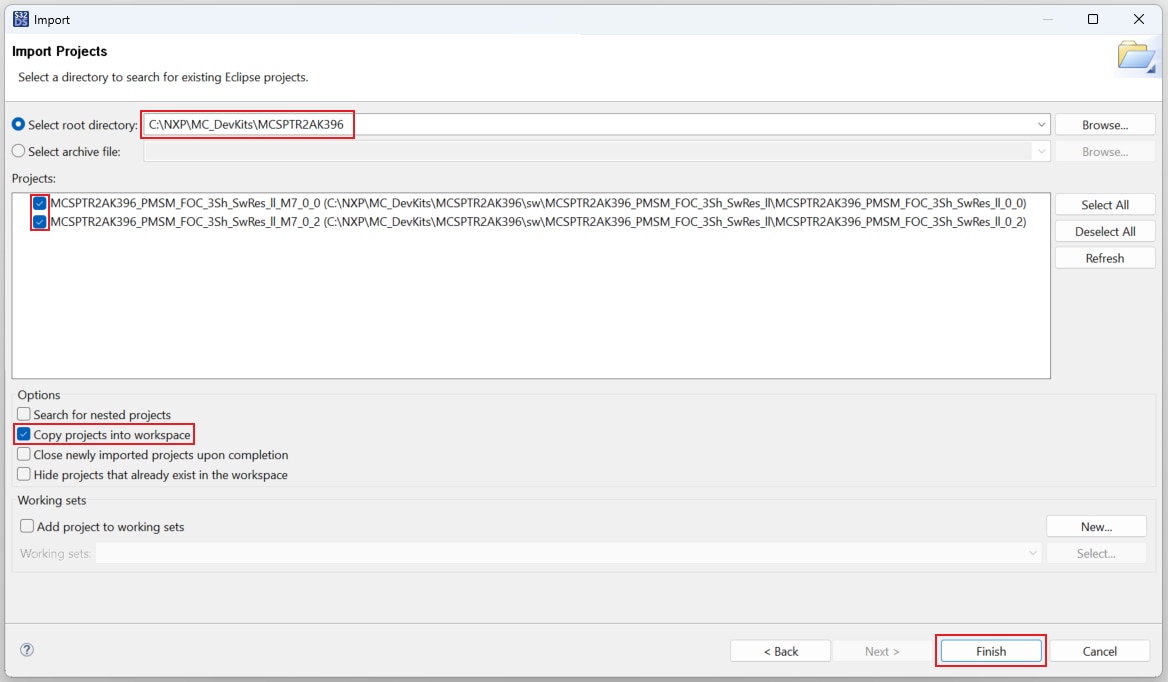
- アプリケーションのインストール・ディレクトリ
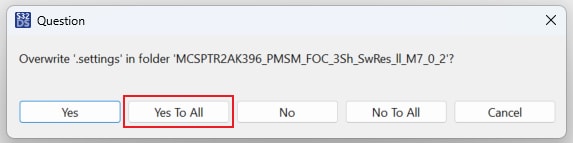
NXP\MC_DevKits\MCSPTR2AK396に移動して、[Select Folder(フォルダを選択)]をクリックします。次に、[Copy projects into workspace(プロジェクトをワークスペースにコピー)]オプションのチェックボックスをオンにします。[Finish(完了)]をクリックします - しばらくすると、新しいウィンドウが表示されます。最初に
M7_0_0プロジェクトに関するウィンドウが、その後にM7_0_2プロジェクトに関するウィンドウが表示されます。[Yes To All(すべてはい)]をクリックして、両方のプロジェクト・ディレクトリの「.settings」フォルダを上書きします
4.2 設定ツールの使用
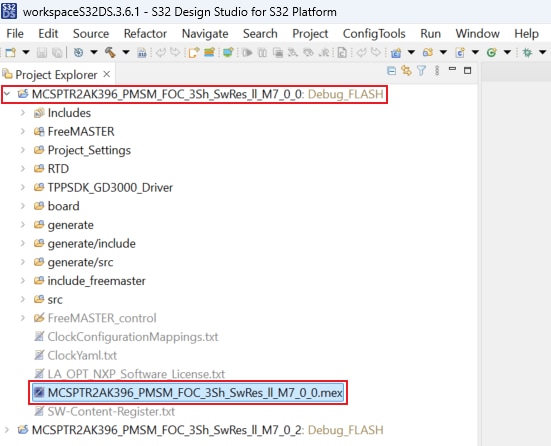
- 1つ目のプロジェクトの構造を展開し、
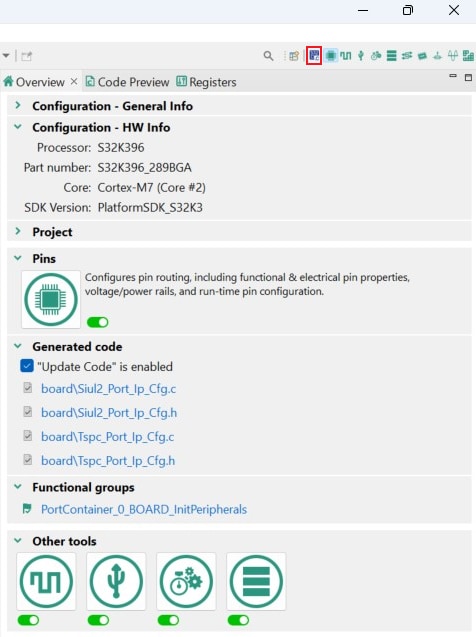
*.mexファイルをダブルクリックして「S32設定ツール」のプロジェクト設定を開きます M7_0_0プロジェクトを設定していることを確認してから、[Update Code(コードの更新)]ボタンをクリックして設定ファイルを生成します。次に、S32設定ツールで、プロジェクト名の横にあるポップダウン・ボタンをクリックし、M7_0_2プロジェクト用の*.mexファイルを選択します。それに応じて[Update Code(コードの更新)]をクリックします

4.3 ソフトウェアのアップロードとデバッグ
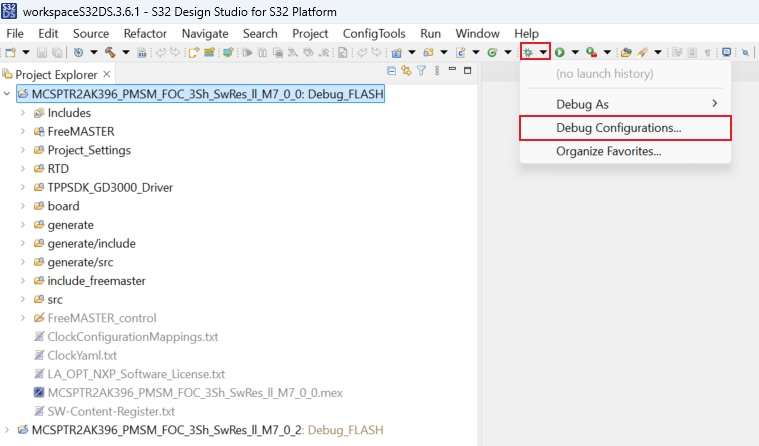
- S32DSで、右上隅にあるボタンをクリックし、C/C++の画面に戻ります
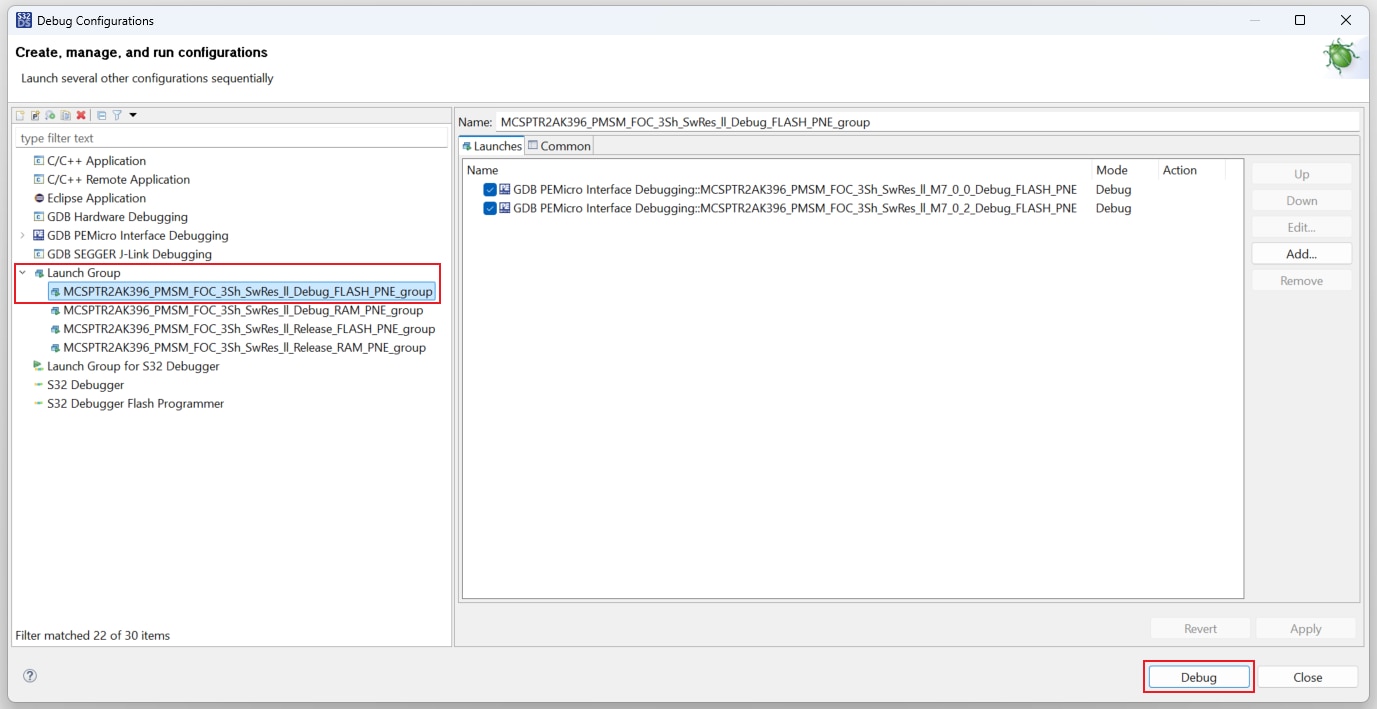
- [Debug As(名前を付けてデバッグ)]メニューをクリックし、[Debug Configurations(デバッグ設定)]を選択します
- 次に[Launch Group(起動グループ)]を展開し、最初の起動設定をクリックします。この設定によって、
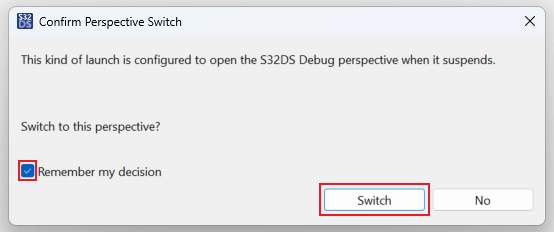
M7_0_0プロジェクトとM7_0_2プロジェクトの両方がMCUにアップロードされます。[Debug(デバッグ)]をクリックすると、ソフトウェアがビルドされ、MCUにアップロードされます - その後、新しいウィンドウが表示されます。[Remember my decision(選択内容を保存する)]チェックボックスをオンにして、[Switch(切り替え)]をクリックします
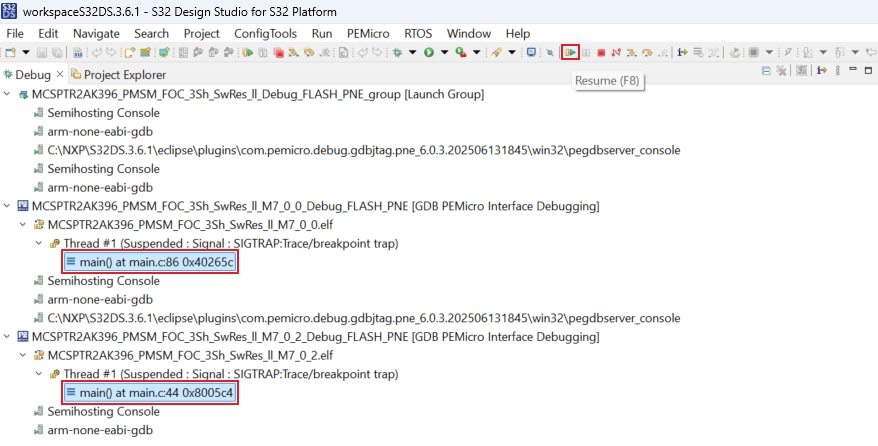
- S32DSがデバッグ画面に切り替わります。まず、Ctrlキーを押しながら両方のプロジェクトのmain()ファイルをクリックして、選択状態にします。次に[Resume(再開)]をクリックして(または
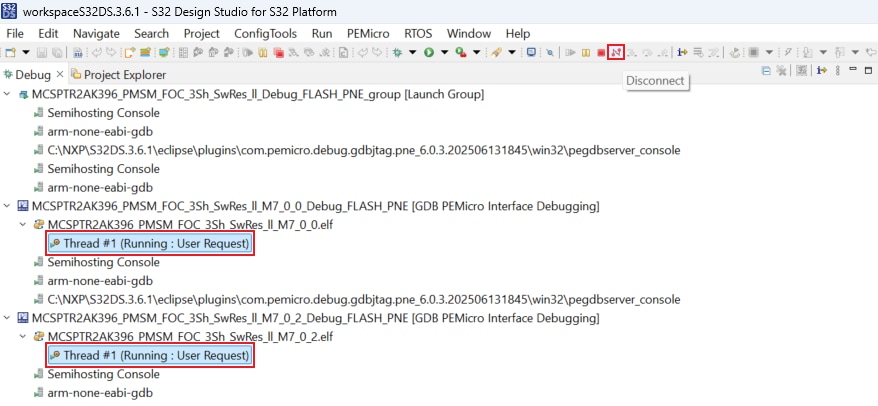
F8キーを押して)両方のプロジェクトを実行します - [Disconnect(切断)]をクリックすると、S32DS IDEデバッガとFreeMASTERツールの間の干渉を回避できます
4.4 デバッグ・ツールの設定
FreeMASTERアプリケーションを起動します。
*.pmpx FreeMASTERプロジェクト

通信を有効にするには、FreeMASTERツールバーで[Go]をクリックします(またはCtrl+Gを押します)。
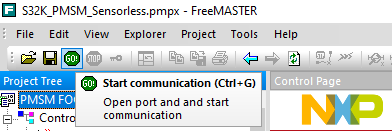
通信が成功すると、最下部のステータス・バーに「RS-232 UART Communication;COMn;speed = 115200」と表示されます。
アプリケーション制御
アプリケーションの制御
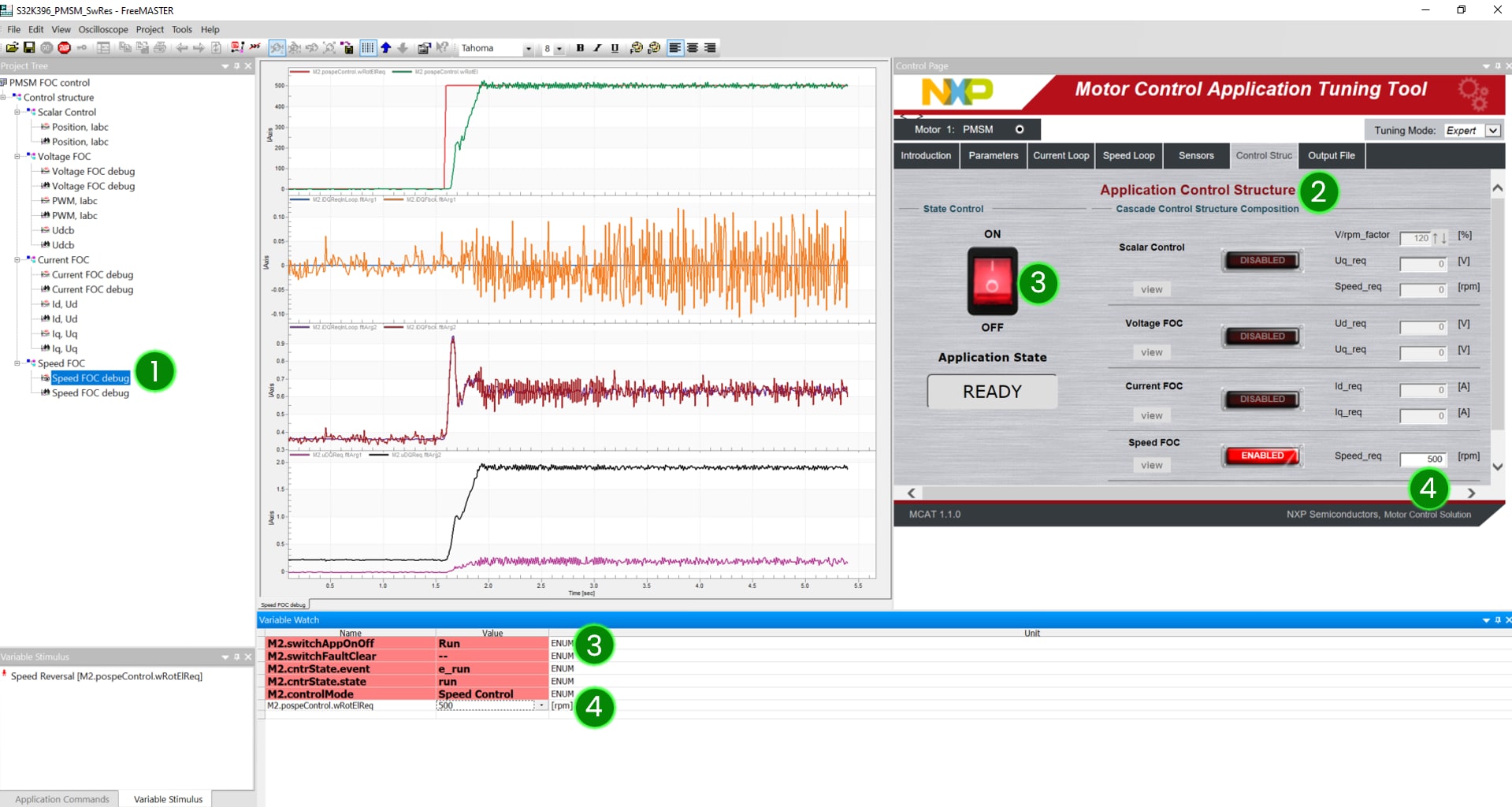
モーターを回転させるには、次の手順に従います。
- プロジェクト・ツリーからSpeed FOCデバッグ・ビューを選択します
- モータ制御アプリケーション・チューニング (MCAT) ツール・タブの[Control Struct(制御構造)]タブに切り替えます
- MCATまたは変数監視ウィンドウでアプリケーションをオンに切り替えます
- MCATまたは変数監視ウィンドウで必要な速度を設定します
必要に応じて、パワー・ステージ・ボードのSW1スイッチとSW3/SW2ボタンでモータ速度を制御できます。
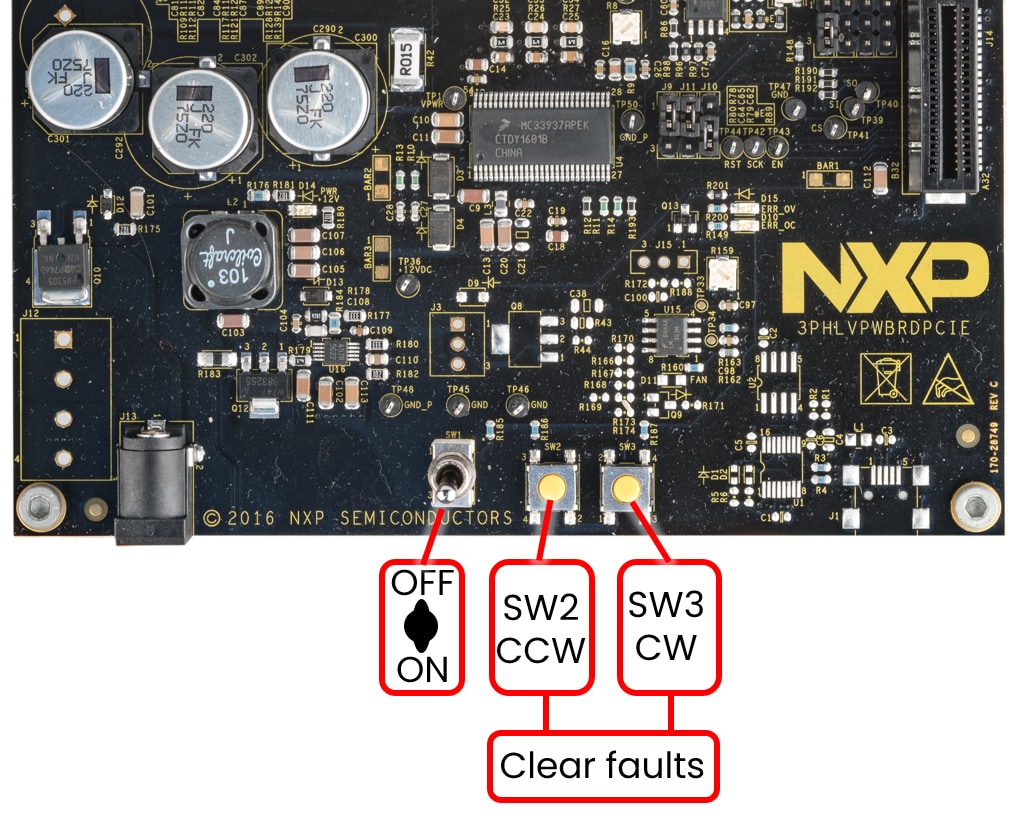
- SW1のバーを下に(ボードの外側方向へ)動かして、アプリケーションをオンにします
- SW3/SW2を押して、ロータを時計回り/反時計回りに回転させます
- もう一度SW3/SW2を押すと、モータの速度が増減します
- SW1のバーを上に(ボードの中心方向へ)動かして、モータを停止します
- SW3とSW2を同時に押すと、保留中の障害がクリアされます
設計・リソース
チップに関するドキュメント
アプリケーションに関するドキュメント
サポート
トレーニング
フォーラム
NXPのいずれかのコミュニティ・サイトで、他のエンジニアとつながり、MCSPTR2AK396を使用した設計に関する専門的なアドバイスを受けることができます。