三相BLDC/PMSM高電流アプリケーション向けMCSXSR1CS12ZVM評価ボードのスタート・ガイド
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
お客様の S12ZVM high-current BLDC/PMSM Evaluation Board
1. パッケージの内容
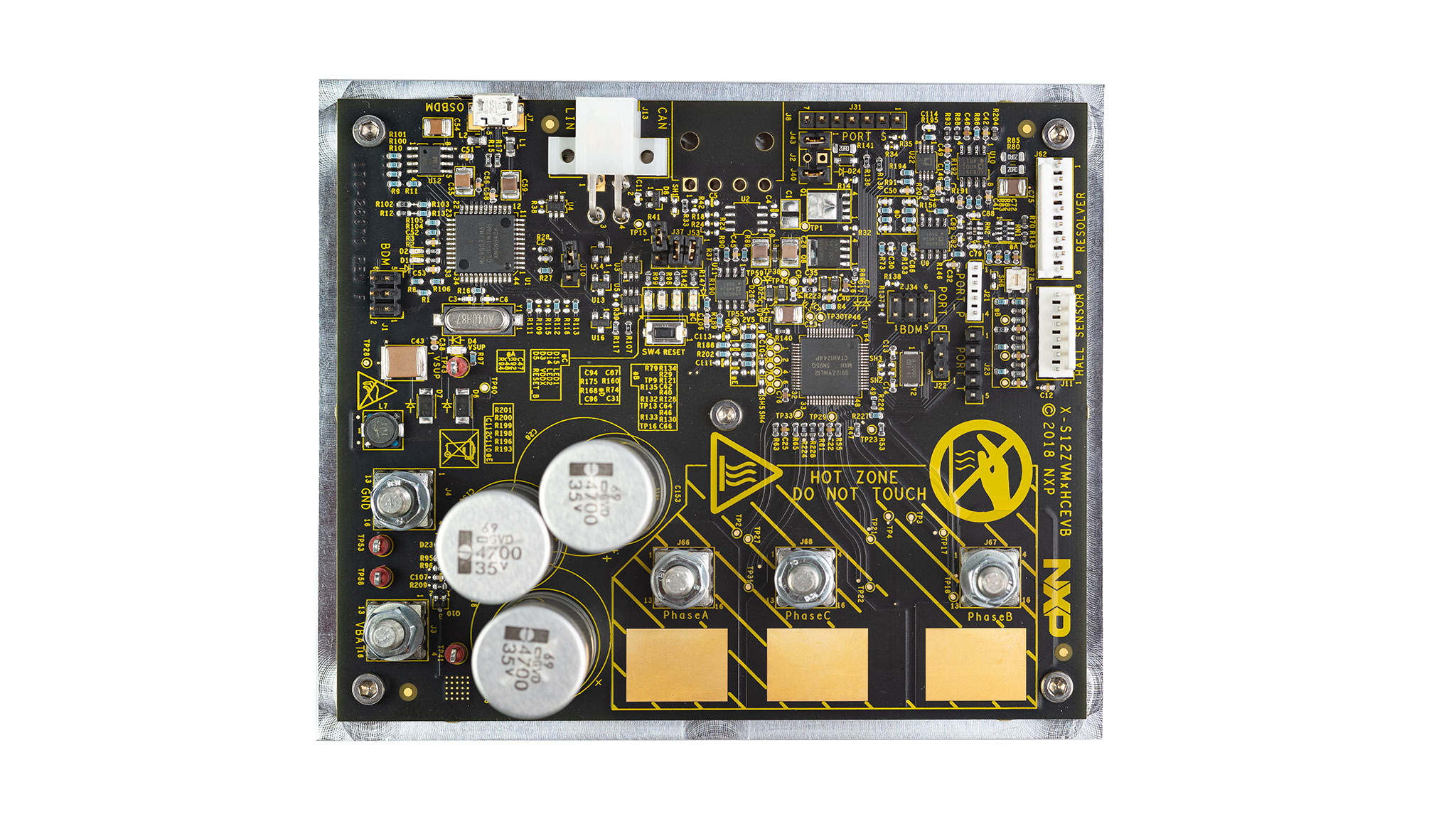
1.1 評価ボードについて
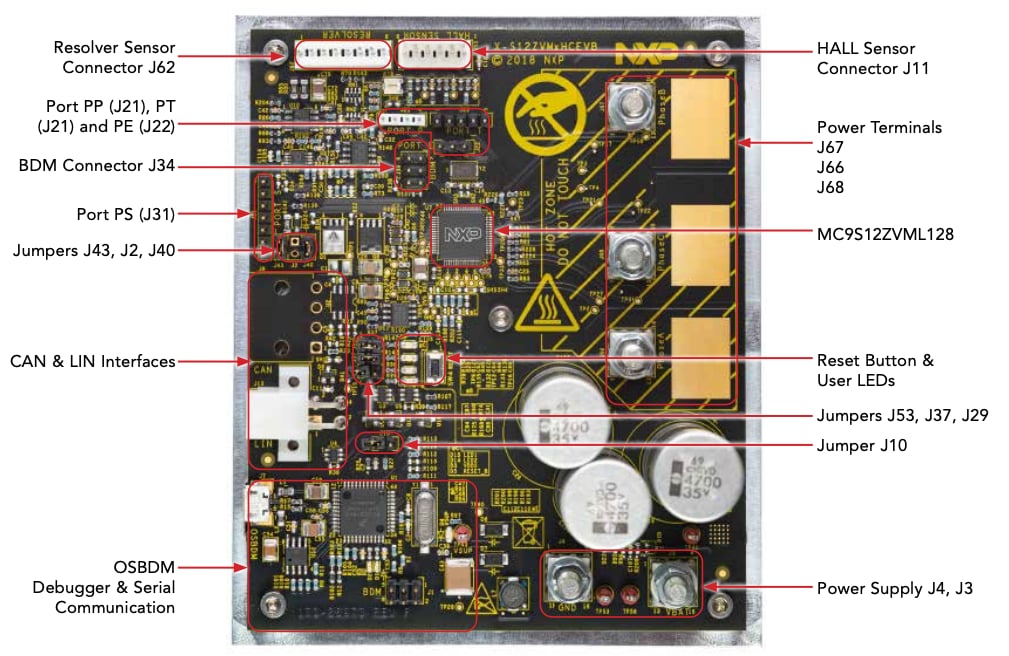
1.2 ヘッダ/ピン配列
MCSXSR1CS12ZVM評価ボードは、最大1 kWの三相ACモータを制御するように設計されています。アプリケーションの前に設定ジャンパを設定します。
| MCSXSR1CS12ZVMのピン | 機能 | S12ZVMのピン |
|---|---|---|
J3 |
VBAT | - |
J4 |
GND | - |
J11-1 |
VCC | EVDD |
J11-2 |
GND | - |
J11-3 |
HALL_A | PT1 |
J11-4 |
HALL_B | PT2 |
J11-5 |
HALL_C | PT3 |
J11-6 |
NC | NC |
J21-1 |
GPIO | PP0 |
J21-2 |
GPIO | PP1 |
J21-3 |
GPIO | PP2 |
J21-4 |
GND | - |
J22-1 |
GPIO | PE0 |
J22-2 |
GPIO | PE1 |
J22-3 |
GND | - |
J31-1 |
GPIO | PS0 |
J31-2 |
GPIO | PS1 |
J31-3 |
GPIO | PS2 |
J31-4 |
GPIO | PS3 |
J31-5 |
GPIO | PS4 |
J31-6 |
GPIO | PS5 |
J31-7 |
GND | - |
J34-1 |
BKGD | BKGD |
J34-2 |
GND | - |
J34-3 |
NC | NC |
J34-4 |
U_RST | RST |
J34-5 |
NC | NC |
J34-6 |
+5VU | - |
J62-1 |
RES_GENP | - |
J62-2 |
RES_GENM | - |
J62-3 |
RES_SIN | - |
J62-4 |
RES_SIN_REF | - |
J62-5 |
RES_ COS | - |
J62-6 |
RES_COS_REF | - |
J62-7 |
GND | - |
J62-8 |
+5VA | - |
J66 |
PHASE_A | - |
J67 |
PHASE_B | - |
J68 |
PHASE_C | - |
2. ソフトウェアの入手
2.1 クイック・スタート・パッケージのダウンロード
MCSXSR1CS12ZVM評価ボード用のモータ制御アプリケーション・ソフトウェア一式をダウンロードします。
2.2 統合開発環境 (IDE) の入手
MCSXTE2BK142は、マイクロコントローラ用CodeWarrior® 11.x IDEを使用するとパフォーマンスが向上します。
マイクロコントローラ用CodeWarrior 11.x IDEをダウンロードする
2.3 ランタイム・デバッグ・ツールの入手
MCSXTE2BK142は、FreeMASTERツールを使用してランタイム・デバッグを行うとパフォーマンスが向上します。
また、FreeMASTER通信ドライバ(サンプル・プロジェクトにあらかじめ含まれているソース・コード)をダウンロードしてインストールすることもできます。
2.4 OSBDMデバッグ・インターフェース・ドライバのインストール
P&Eから最新版をダウンロードします。
3. 接続
3.1 ジャンパの設定
| ジャンパ | オプション | 設定 | 説明 |
|---|---|---|---|
J2 |
CAN VREG | オープン | CAN VREGが無効になります(デフォルト)。短絡:CAN VREGが有効になります(S12ZVMCバージョンを接続する必要があります)。 |
J10 |
OSBDMブートローダ | オープン | OSBDMブートローダの更新が無効になります(デフォルト)。短絡:OSBDMブートローダの更新が有効になります。 |
J29 |
VDDXからBDM | オープン | VDDXからtde OSBDMへの給電が無効になります(デフォルト)。短絡:VDDXからtde OSBDMへの給電が有効になります。 |
J37 |
LED2有効 | オープン | PS5のユーザーLED2 (D14) が無効になります。短絡:PS5のユーザーLED2 (D14) が有効になります(デフォルト)。 |
J40 |
VDDXバラスト | オープン | VDDXのVSUPバラスト・トランジスタが無効になります。短絡:VDDXのVSUPバラスト・トランジスタが有効になります(デフォルト)。 |
J43 |
VSUPからリゾルバ | オープン | VSUPからVSUP2へのリゾルバが無効になります。短絡:VSUPからVSUP2へのリゾルバが有効になります(デフォルト)。 |
J53 |
LED1有効 | オープン | PS4のユーザーLED1 (D15) が無効になります。短絡:PS4のユーザーLED1 (D15) が有効になります(デフォルト)。 |
3.2 電源の接続
M5リングアイ・コネクタと適切な配線(最大10 A/mm2)を使用して、適切な12 V電源(8~18 V範囲または3.5~18 V範囲、ブースト・オプションが有効)を電源端子J3およびJ4に接続します。

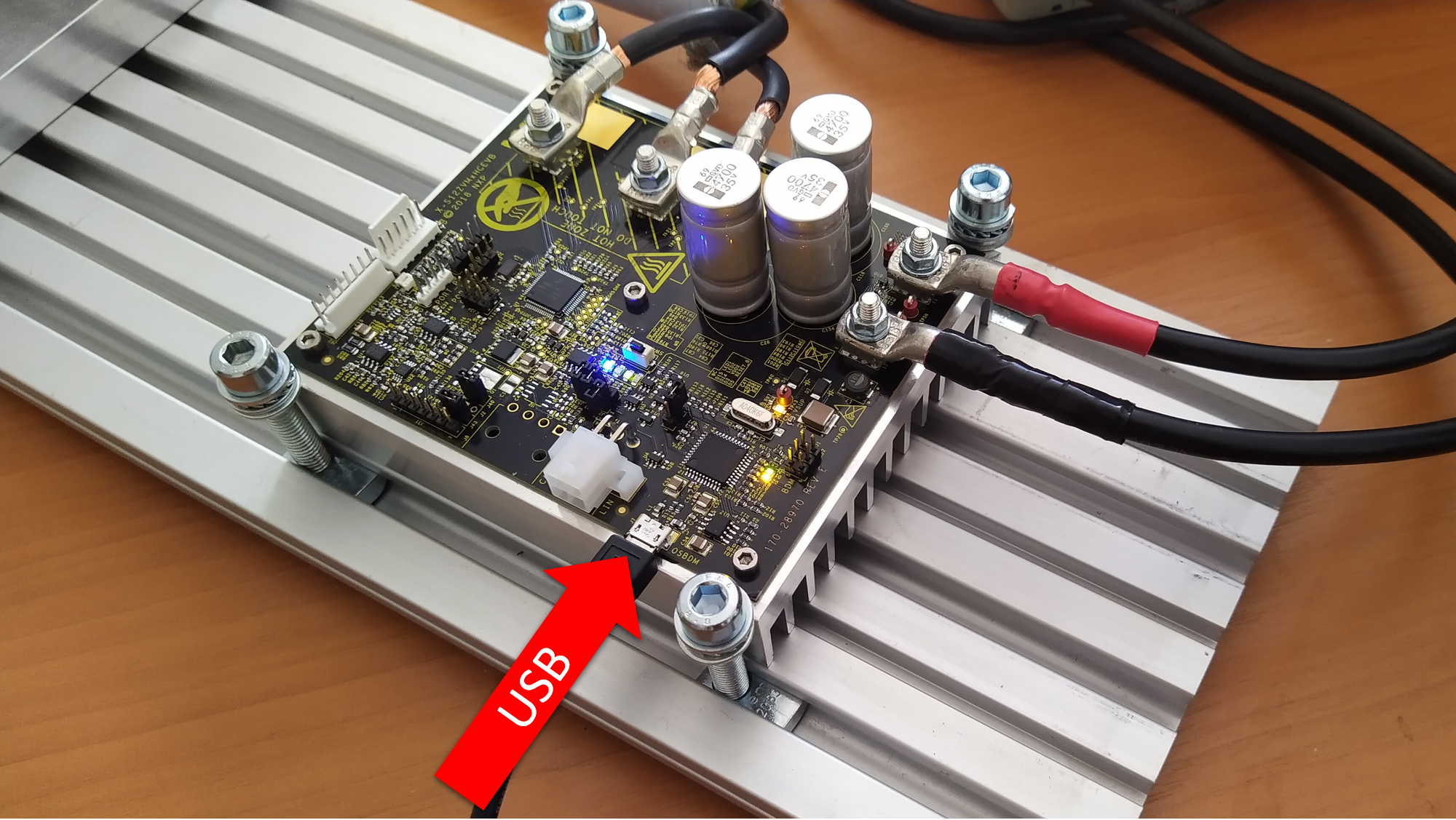
3.3 USBケーブルの接続
USBケーブルを使用してMCSXSR1CS12ZVMをPCに接続します。
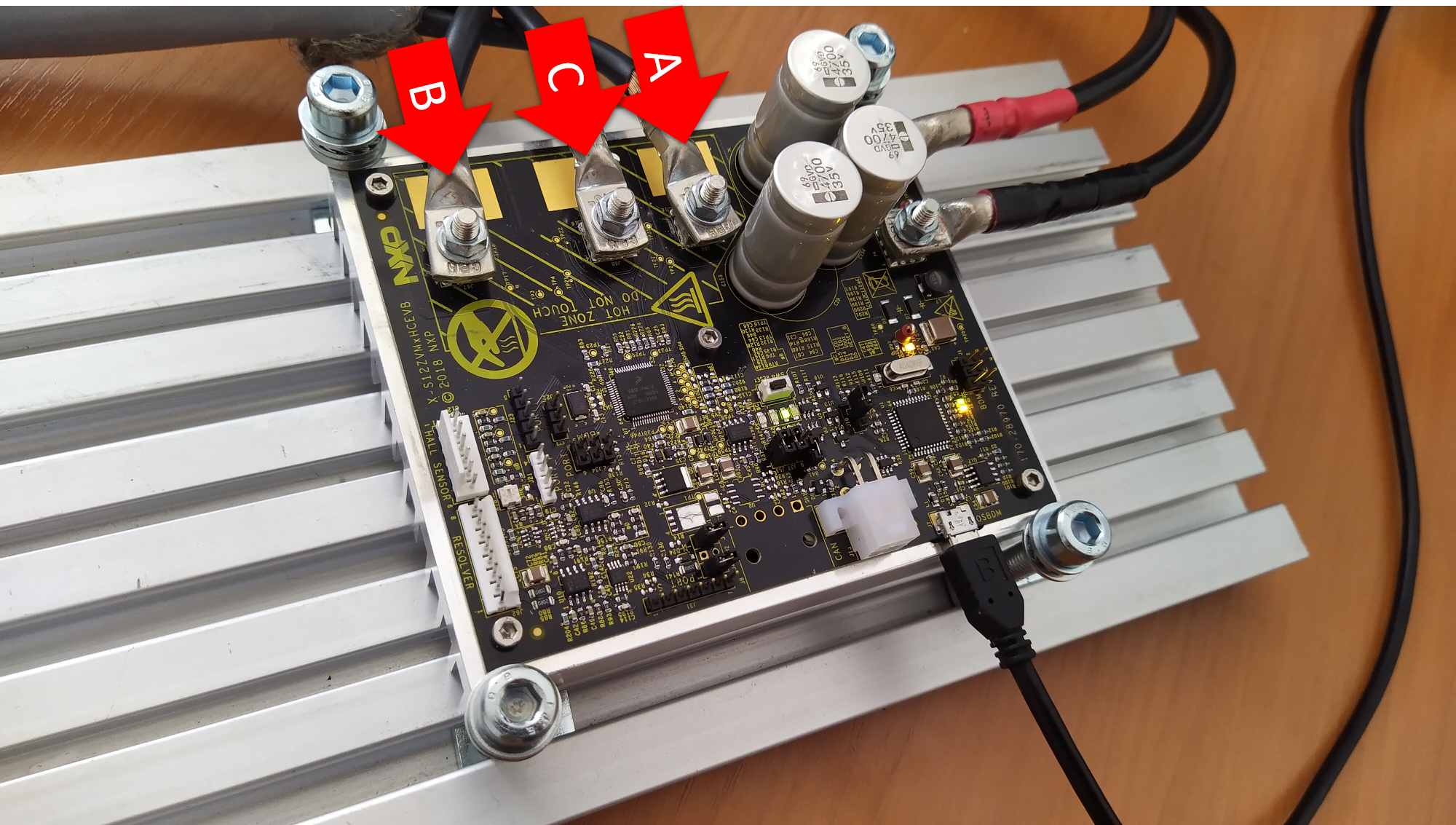
3.4 4. モータの接続
M5リングアイ・コネクタと適切な配線(最大10 A/mm2)を使用して、出力端子J66、J67、J68に接続します。
4. ビルドとロード
動作テストをしてみましょう。
4.1 プロジェクトのIDEへのインポートとデバッグ
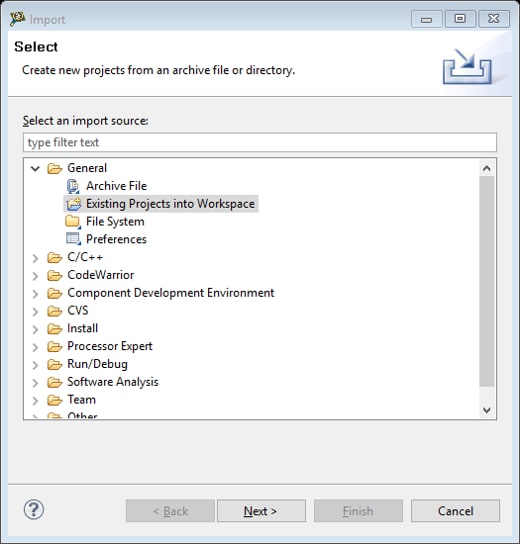
- IDEを起動し、[File(ファイル)]>[Import(インポート)]の順に選択して、インストールされているアプリケーション・ソフトウェア・プロジェクトをマイクロコントローラ用CodeWarrior 11.xにインポートします
- 次に、[General(全般)]>[Existing Projects into Workspace(既存プロジェクトをワークスペースへ)]を選択します。ルート・ディレクトリを選択するために、[Next(次へ)]をクリックします
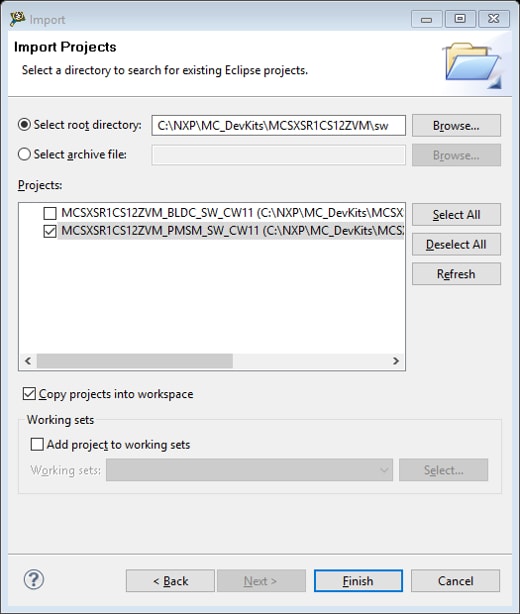
MC_DevKits\MCSXSR1CS12ZVM\sw\...に移動します。- 次に、モータ制御の駆動制御を選択します。
- フィールド指向駆動制御を使用するPMSMの場合は、MCSXSR1CS12ZVM_PMSM
- 6ステップ整流駆動制御を使用するBLDCの場合は、MCSXSR1CS12ZVM_BLDC
-
[Copy projects into workspace(プロジェクトをワークスペースにコピー)]をクリックし、[Finish(完了)]をクリックします。
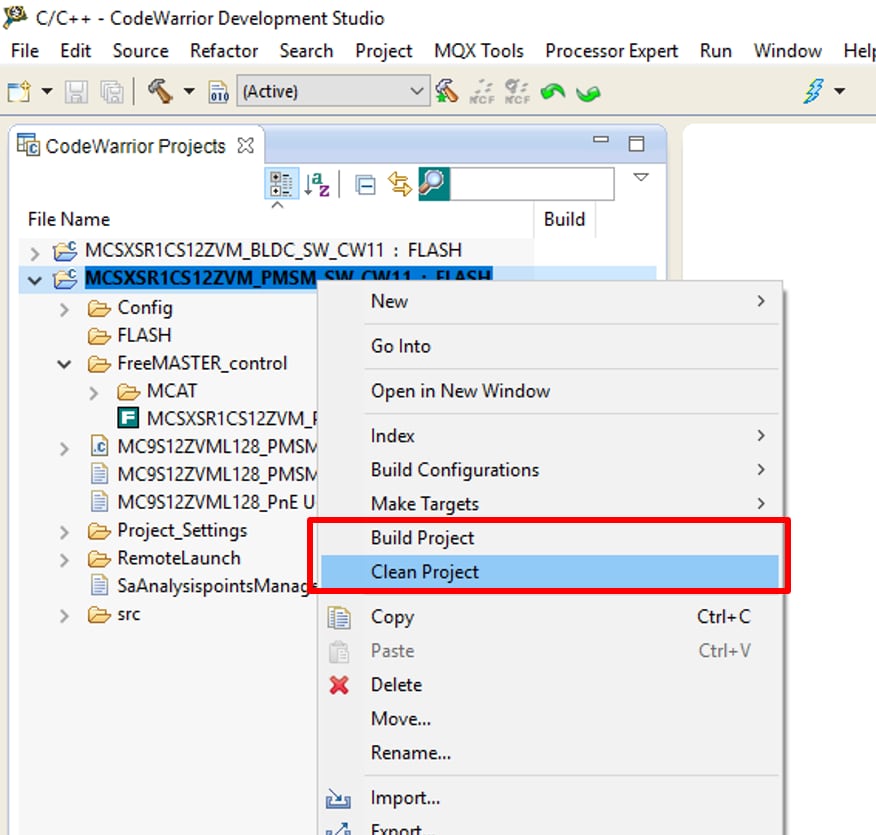
オプション:プロジェクトのビルド
インポートしたプロジェクトを右クリックし、コンテキスト・メニューから[Clean(消去)]を選択します。
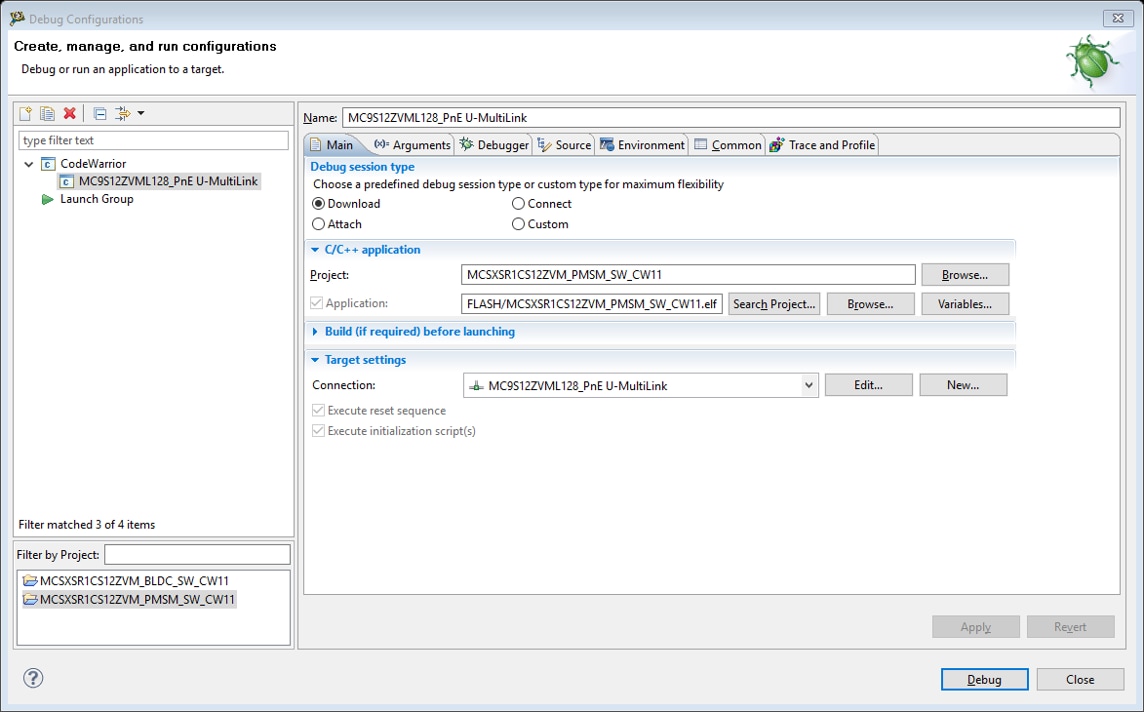
4.2 コードをデバッグしてMCUにロードする
ビルド済みコードをMCUにロードするには、[Run(実行)]>[Debug Configuration(デバッグ設定)]に移動し、定義済みのデバッグ設定を選択して[Debug(デバッグ)]ボタンをクリックします。
4.3 ランタイム・デバッガとの通信
- FreeMASTERアプリケーションを起動します
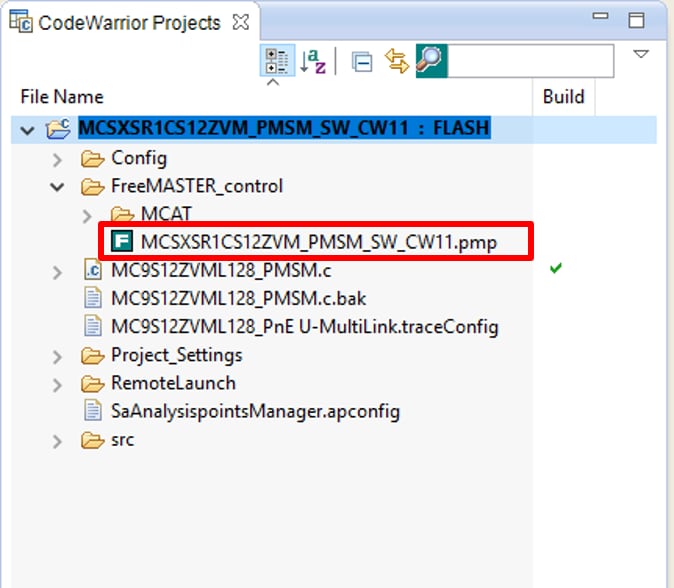
- [File(ファイル)]>[Open Project(プロジェクトを開く)]の順にクリックして、
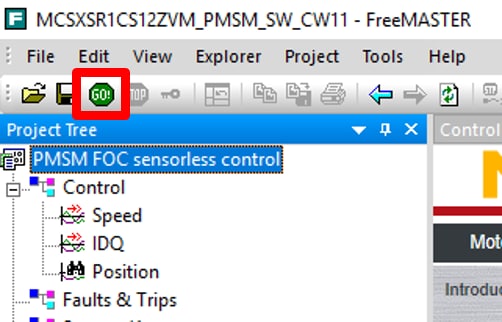
❮selected project❯ FreeMASTER_control\ MCSXSR1CS12ZVM_PMSM_SW_CW11.pmpプロジェクトを開きます - 通信を有効にするために、FreeMASTERツールバーで[Go(実行)]をクリックします(またはCtrl+Gを押します)
- 通信が成功すると、最下部のステータス・バーに次のように表示されます。
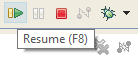
RS232 UART Communication;COMn; speed = 19200 - [Resume(再開)] (F8) ボタンをクリックしてコードを実行し、CWデバッガとFreeMASTERツール間の干渉を回避するために[Disconnect(切断)]ボタンを使用します

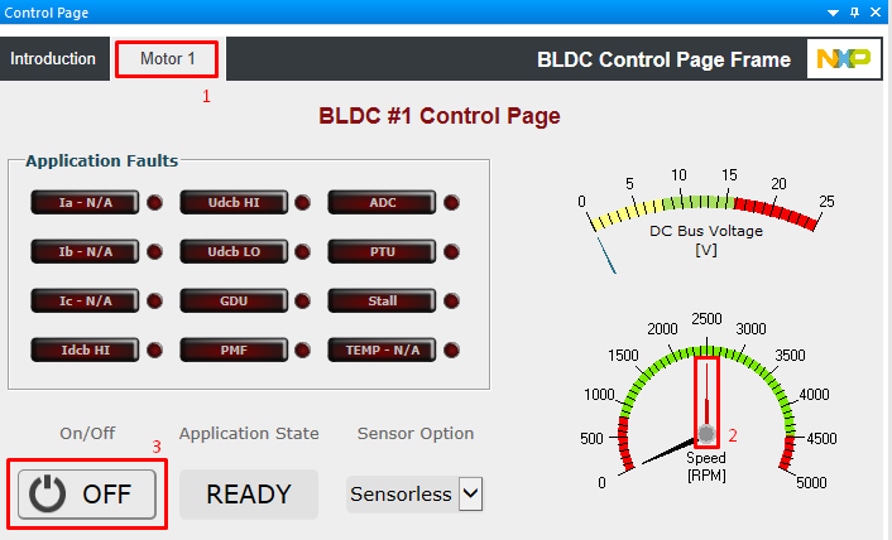
4.4 制御アプリケーションの起動
モータ制御アプリケーション・チューニング (MCAT) ツールを起動し、ツールのメニューでアプリケーション制御ページを表示します。ボードに電源を接続すると、アプリケーションがREADY状態になります。状態はボードの青色LEDで示されます。LEDで示される状態は以下のとおりです。
- READY、INIT状態 – LEDがゆっくり点滅
- CALIB、ALIGN状態 – LEDが点滅
- RUN状態 – LEDが点灯
- FAULT状態 – LEDが速く点滅
4.5 ランタイム・デバッグ・ツールを使用したプロジェクトのデバッグ
アプリケーション・プロジェクト・フォルダから適切な*.pmpファイルを実行します。
4.6 MCUとの接続の確立
- FreeMASTER MCATの制御ページの[ON/OFF]ボタンをクリックしてアプリケーションを起動します。
-
変数監視ウィンドウでSpeed Required(必要な速度)変数の値を手動で変更するか、MCATの制御タブで速度ゲージをクリックして、必要な速度を設定します。
4.7 モータのチューニング
これで、モータ制御アプリケーションをチューニングする準備が整いました。
- 制御ループをチューニングします
- FreeMASTERで制御タブに移動し、必要なモータrpmを設定して、モータ・ドライブをオンにします
- FreeMASTER MCATの制御ページで[ON/OFF]ボタンをクリックしてアプリケーションを停止します

これでモータが作動します。
設計・リソース
ボードに関するドキュメント
チップに関するドキュメント
サポート
フォーラム
NXPのコミュニティ・サイトで他のエンジニアとつながり、MCSXSR1CS12ZVMアプリケーション・プロセッサを使用した設計に関する専門的なアドバイスを受けることができます。