MR-CANHUBK344評価ボードのスタート・ガイド
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
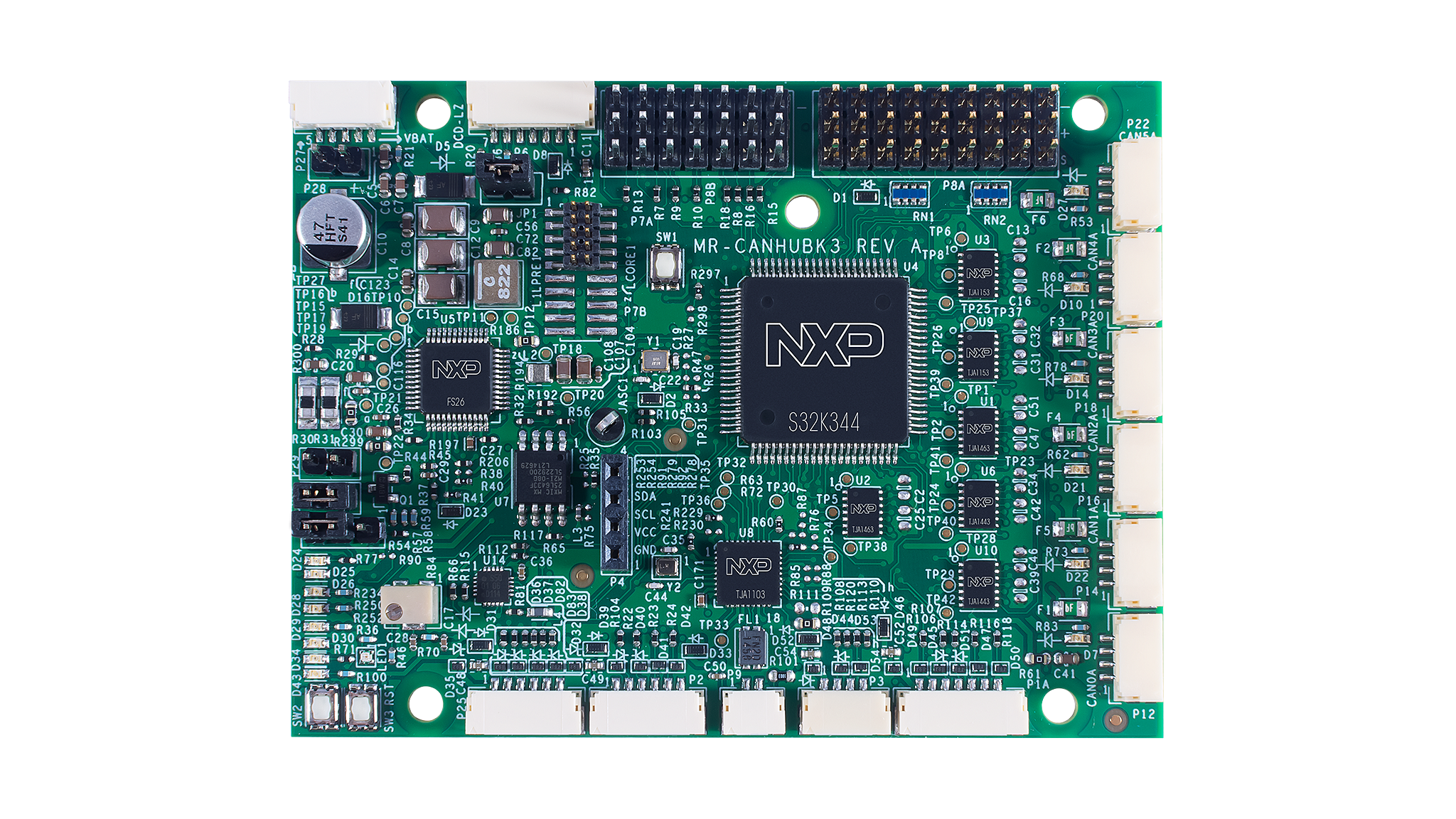
お客様の S32K344 100BASE-T1およびSix CANFDに対応する搬送ロボット向け評価ボード
1. パッケージの内容
これはMR-CANHUBK344のクイック・スタート・ガイドです。ハードウェアの基本セットアップ手順に加え、IEEE 1722 ACF-CANプロトコルを使用してイーサネットからCANへおよびCANからイーサネットへ変換するデモ・ソフトウェアについて記載しています。
モバイル・ロボティクス・アプリケーション、車載ソフトウェア・スタック、およびFreeRTOS、NuttX、PX4、Zephyrなどの関連RTOSに固有のサンプル・コードは、nxp.com/mr-canhubk344で入手できます。
1.1 アプリケーションの概要
このサンプル・コードは、6つすべてのCANポートと100Baseイーサネット・ポートをサポートしています。100BASE-T1ポートでは自動モード検出が有効になっているため、それ以上の調整は必要ありません。
ボードには、以下のケーブルとアダプタが付属しています。
- ハードウェア
- MR-CANHUBK3ボード
- DCD-LZプログラミング・アダプタ・ボード(コンソールUARTへのアクセス用)
- USB-UARTアダプタ・ケーブル(DCD-LZに付属)
- 電源アダプタ・ケーブル(一般的な赤いSYコネクタ、バレル・コネクタ、XT-60リポ・バッテリ・コネクタへのJST-JHを含む)
- CANケーブル x 6
- CAN終端ボード x 6
- T1イーサネット・ケーブル(JST-GHコネクタ使用)x 1
- UART/SPI/I2C/特定の用途に応じたカスタマイズ向けの汎用JST-GHケーブル
- 小型OLEDディスプレイ
- セキュア・エレメントに接続済みのNFCアンテナ
- ドキュメントおよびソフトウェア
- リリース・ノート
- Project.zip S32 Design Studioプロジェクト・ファイル
2. ソフトウェアの入手
Project.zipファイルは、MR-CANHUBK344のページのサンプル・セクションからダウンロードできます。このプロジェクト・ファイルはS32 Design Studioバージョン3.4と互換性があります。
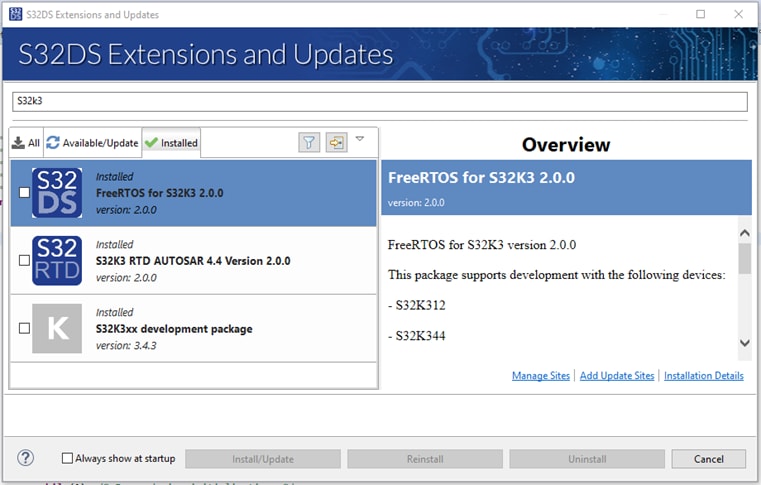
プロジェクトをビルドするには、以下の拡張が必要です。
S32 Design Studio拡張機能マネージャの画面は、以下の画像のようなものになります。
[Add Update Sites(更新サイトの追加)] リンクをクリックし、手動でダウンロードした更新サイト・ファイルを追加します。
2.1 アプリケーション
MR-CANHUBK3ボードで「MR_CANHUBK3_IEEE1722」が正常にフラッシュ書き込みされると、イーサネットとCAN IEEE 1722プロトコル間のコンバータとして機能します。
CAN0~CAN5から受信したCANメッセージは、IEEE 1722 ACF-CANフレームに変換され、イーサネットにブロードキャストされます。受信したCANフレームを表示するには、Windows/LinuxマシンにWiresharkをインストールしてください。
3. 接続
MR-CANHUBK344ボードにはいくつかのインターフェースが搭載されています。キットには、すべてのインターフェースに必要なケーブルが含まれています。ただし、これらのケーブルは、特定の用途に応じて切断や改変が必要になる場合があります。このクイック・スタート・ガイドは、読者がこのタイプのハードウェアに精通しており、かつCAN、T1イーサネット、および電源の接続ができることを前提としています。
また、デモには、CAN/CAN FDインターフェース接続と100BASE-T1車載イーサネットの接続を行えるようにする外付けコンポーネントやテスト機器も必要となります。
3.1 電源入力
ベンチの電源または適切なバッテリー電源を使用して、5~40 V(公称12 V)@100 mAの電源をボードの左上隅にあるコネクタP27(ピン1~2電源、ピン3 NC、ピン4~5グランド)に接続するか、隣のP28コネクタ(ピン1電源、ピン2グランド)を使用します。
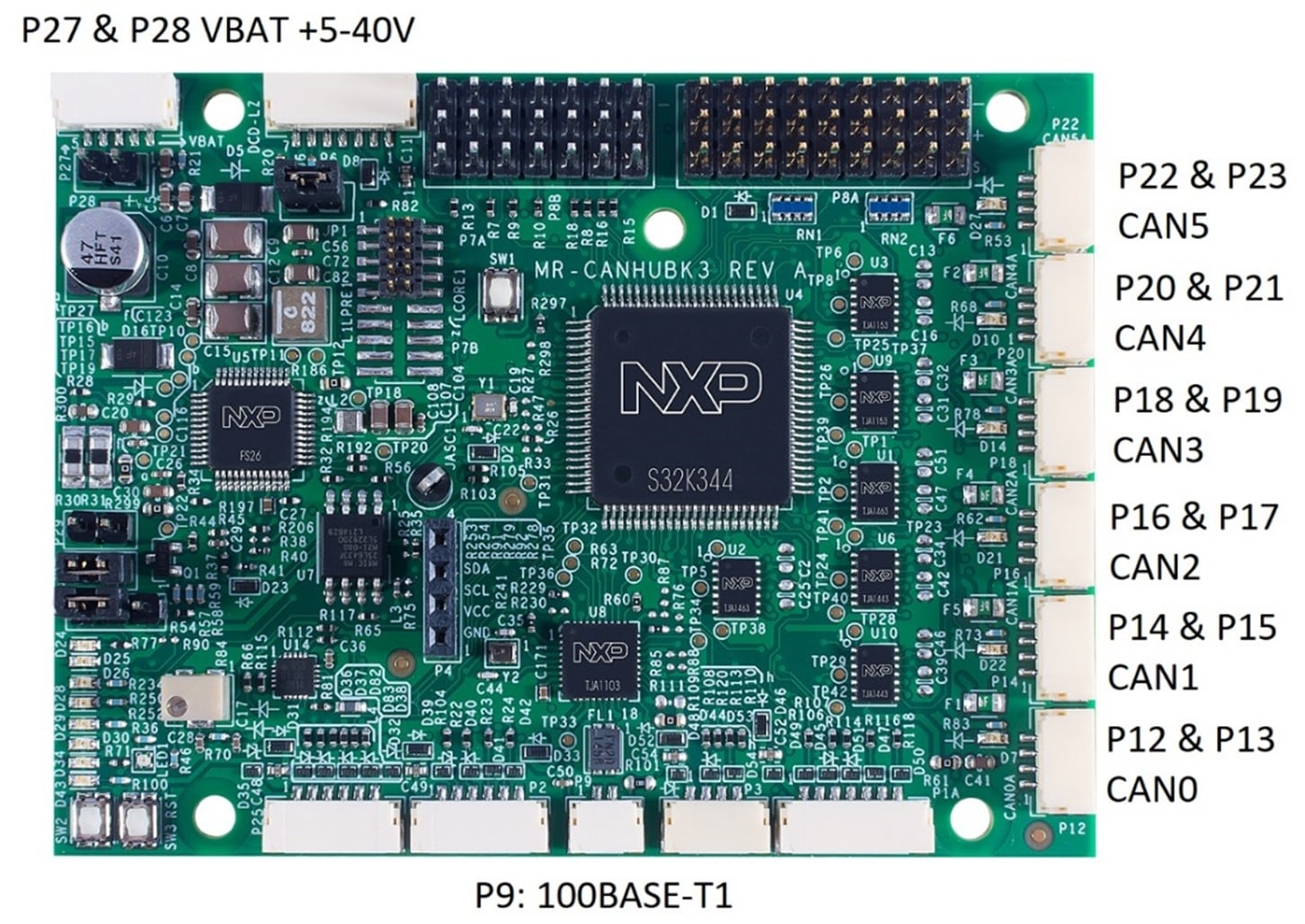
3.2 CANバス接続
| ピン番号 | 信号 | 仕様 |
|---|---|---|
| 1 | 5V4 | 5.4 V |
| 2 | CANx_H | 5.0 V |
| 3 | CANx_L | 5.4 V |
| 4 | グランド | 0 V |
通常、CANバスは両端を終端処理する必要があります。必要に応じて、付属のCAN終端ボードのいずれかを使用してください。CAN SIC PHYを搭載したポートを使用している場合は、別のCAN終端も可能な場合があります。
3.3 100Base-T1イーサネット接続
T1コネクタ (P9) は、2線式100 Mbpsイーサネット用の2ピンJST-GHコネクタです。信号は容量結合され、PとNの極性があります。極性が逆の場合には、TJA1003 T1インターフェース・チップが自動ネゴシエーションを行います。必要に応じて、ケーブルを切断してワイヤにハンダ付けすることで、このケーブルを他のコネクタ・タイプに適合させることができます。
このJST-GHケーブルは、UCANS32K1SIC、UCANS32K1SCT、RDDRONE-T1ETH8、NavQPlusなどの他のモバイル・ロボティクス・ボードに直接接続されます。RDDRONE-T1ADAPTを使用して、RJ45コネクタ・タイプに変換することもできます。
PCBの裏側にある黄色のLED (D88) は、リンクのステータスを示します。点滅している場合は、リンクしていることを示します。
3.4 ボードの電源投入シーケンス - PMIC WDTの回避
FS26は、NXP Semiconductorsの「ASIL D対応低消費電力セーフティ・システムベーシス・チップ」であり、セーフティ・ウォッチドッグ・タイマ (WDT) を搭載しています。
サンプル・コードでは、ウォッチドッグのチャレンジ機能は実装されていません。代わりに、S32K344の起動時に、サンプル・アプリケーションがウォッチドッグ機能を無効にするリクエストをFS26に送信します。
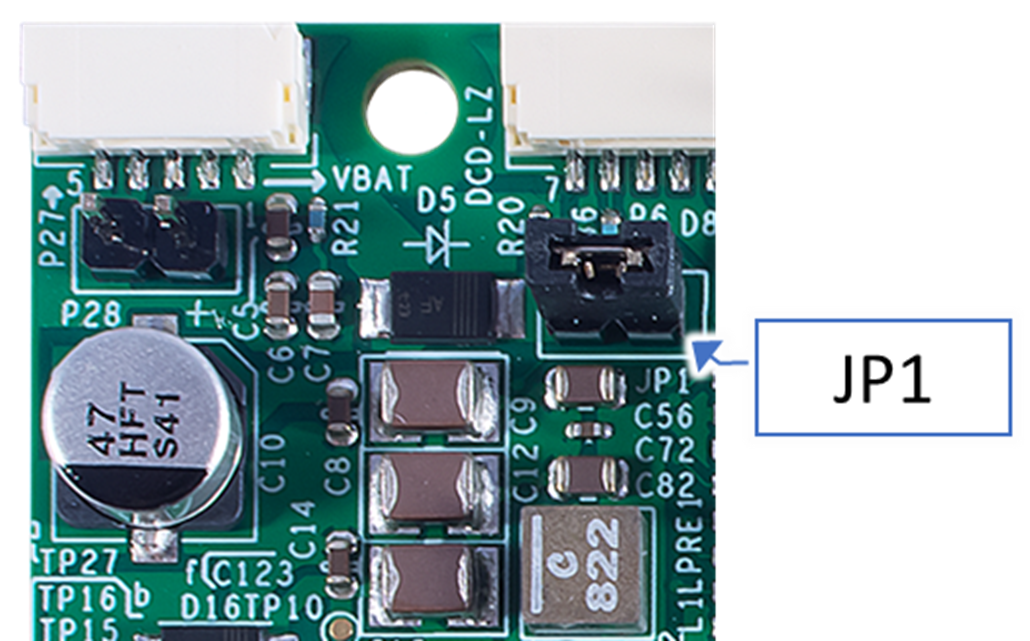
FS26のWDTを回避するには、チップをデバッグ・モードにする必要があります。これは、JP1を取り外し、電源入力P27またはP28に12.0 Vを供給してから、JP1ジャンパを再び挿入することで行うことができます。
これが完了すると、リセットLED D24が点滅を停止し、S32K344がFS26によってリセットされなくなったことを示します。
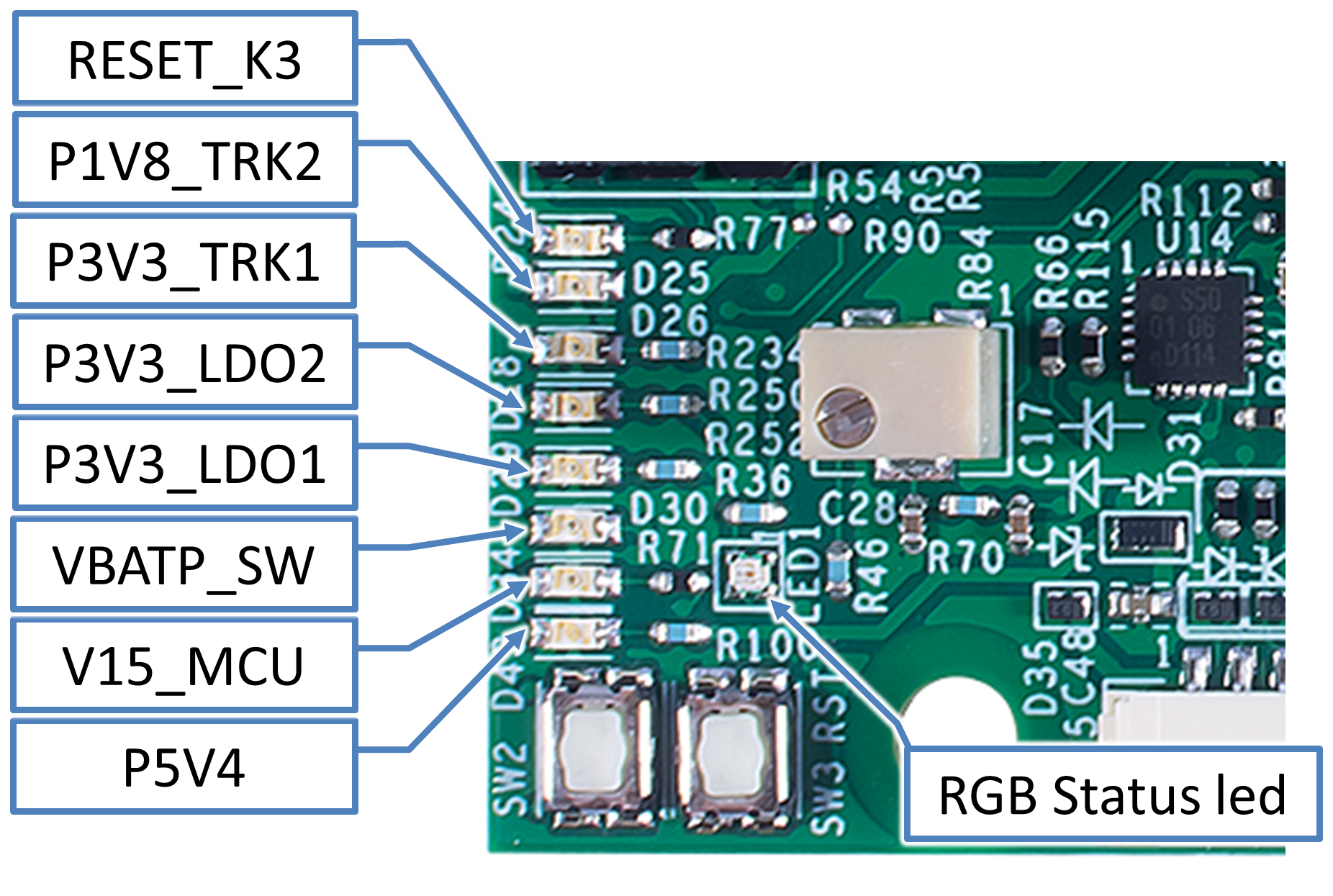
3.5 ボードのステータスLED
| Dxx | LED名称 | 通常のステータス | 説明 |
D24 |
RESET_K3 | オフ | S32K344がリセットされているかどうかを示します |
D25 |
P1V8_TRK2 | オン | FS26 SBCの1V8_TRK2のステータスを示します |
D26 |
P3V3_TRK1 | オン | FS26 SBCの3V3_TRK1のステータスを示します |
D28 |
P3V3_LDO2 | オン | FS26 SBCの3V3_LDO2のステータスを示します |
D29 |
P3V3_LDO1 | オン | FS26 SBCの3V3_LDO1のステータスを示します |
D30 |
VBATP_SW | オン | VBATのステータスを示します |
D34 |
V15_MCU | オン | FS26 SBCのV15のステータスを示します |
D43 |
P5V4 | オン | FS26 SBCのP5V4のステータスを示します |
LED1 |
RGBステータスLED | 緑 | ソフトウェアによる制御。緑は正常動作、青は初期化、赤はエラーの発生を示します。 |
ソフトウェアの実行
4.1 プロジェクトのインポート
付属のProject.zipをインポートするには、[File(ファイル)] → [Import(インポート)] → [General(一般)] → [Project from Folder or Archive(フォルダまたはアーカイブのプロジェクト)] の順に開き、Project.zipアーカイブを選択します。
4.2 S32ピン・ツール
プロジェクトがインポートされたら、プロジェクト・エクスプローラの「MR_CANHUBK3_IEEE1722」を右クリックし、[S32 Configuration Tools(S32設定ツール)] → [Open Pins(ピンを開く)] の順に選択します。
S32ピン・ツールの透視図が表示されるので、メニューの [Update Code(コードを更新)] ボタンをクリックし、[OK] を選択します。ドライバ構成ファイルが生成されます。
4.3 プロジェクトのビルド
プロジェクト・エクスプローラに戻って「MR_CANHUBK3_IEEE1722」を右クリックし、[Build Project(プロジェクトをビルド)] を選択します。これで、ご自身のプログラマを使用して「MR_CANHUBK3_IEEE1722.elf」をフラッシュ書き込みできます。
S32 Design Studio、S32設定ツール、およびデバッグの詳細については、「S32K3およびS32DSのスタート・ガイド」を参照してください。
4.4 CANメッセージのシミュレーション
SW1またはSW2を押してCANメッセージをシミュレーションすることもできます。
CAN0 (P12) をCAN1 (P14) に接続し直し、付属のケーブルを使用してバスを作成します。また、CAN終端ボードをP13に接続してバスを終端させます。
SW1またはSW2のいずれかを押すと、D7とD22の両方のLEDが短く点灯してCANパケットがあることを示します。
SW1はCAN0にCANメッセージを送信し、SW2はCAN1にCANメッセージを送信します。
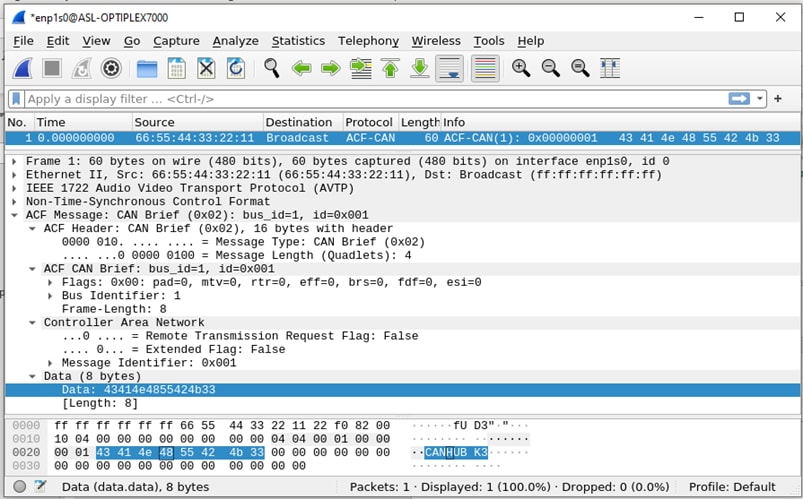
4.5 WireShark
WireSharkをインストールしてCANおよびイーサネットのトラフィックを監視することを強く推奨します。図5は、IEEE 1722を使用してCANパケットが送信されたときのWireSharkの画面を示しています。
設計・リソース
チップに関するドキュメント
サポート
フォーラム
NXPのコミュニティ・サイトで、他のエンジニアとつながり、MR-CANHUBK344評価ボードを使用した設計に関する専門的なアドバイスを受けることができます。