EV-INVERTERGEN3 EVトラクション・インバーター制御リファレンス・デザイン第3世代のスタート・ガイド
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。

お客様の EV-INVERTERGEN3
1. パッケージの内容
NXPのEVトラクション・インバーター第3世代SiC MOSFETイネーブルメント・キットは、SiC MOSFETモジュールを使用して、電気自動車のトラクション・モーターを制御するトラクション・インバーター・モジュールを開発するお客様向けに設計されています。
このページでは、EVトラクション・インバーター制御のリファレンス・デザイン第3世代 (EV-INVERTERGEN3) をセットアップして使用する手順について説明します。
1.1 EV-INVERTERGEN3の概要
EVトラクション・インバーター制御リファレンス・デザイン第3世代

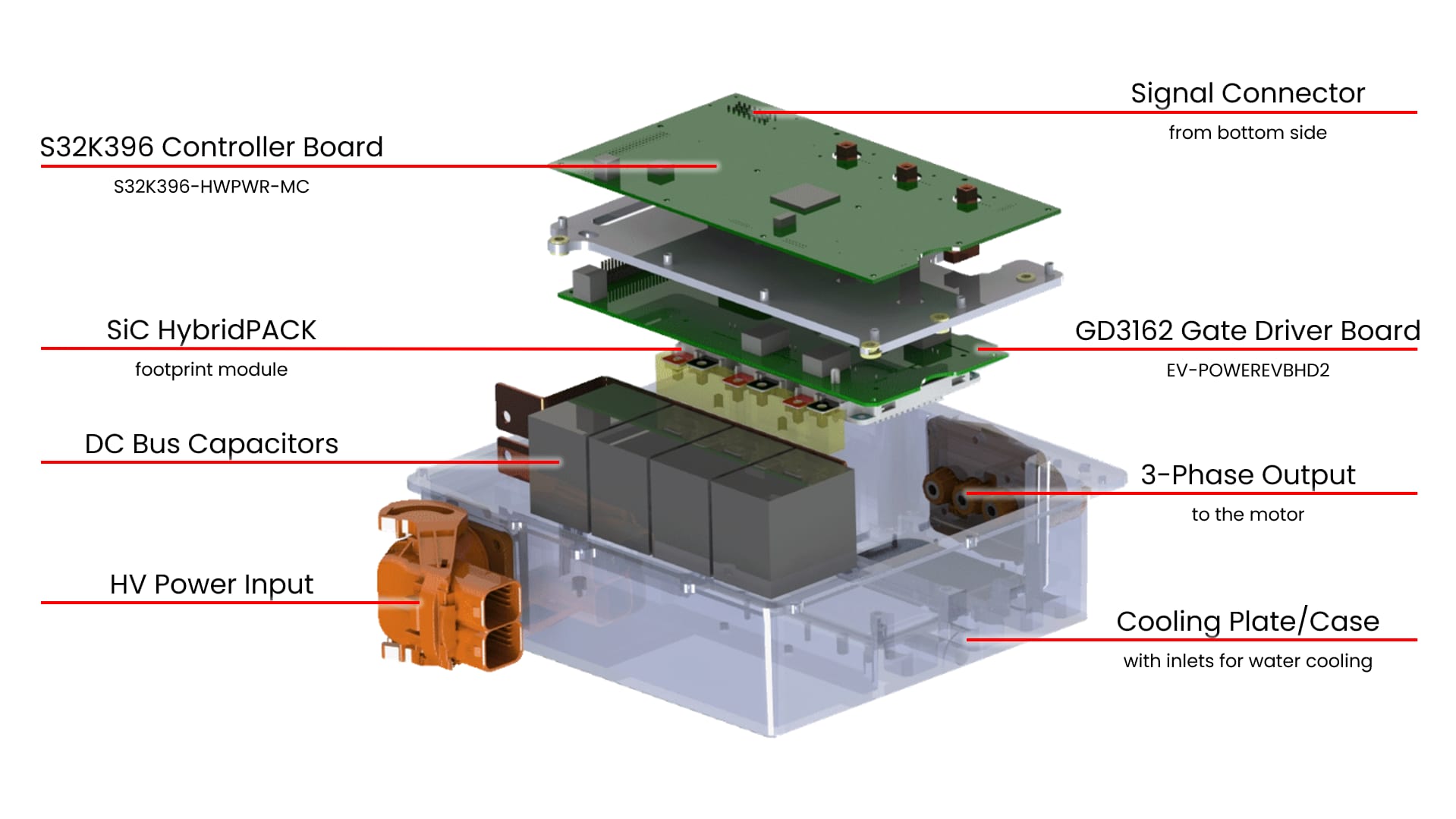
EV-INVERTERGEN3キットには、次のものが含まれます。
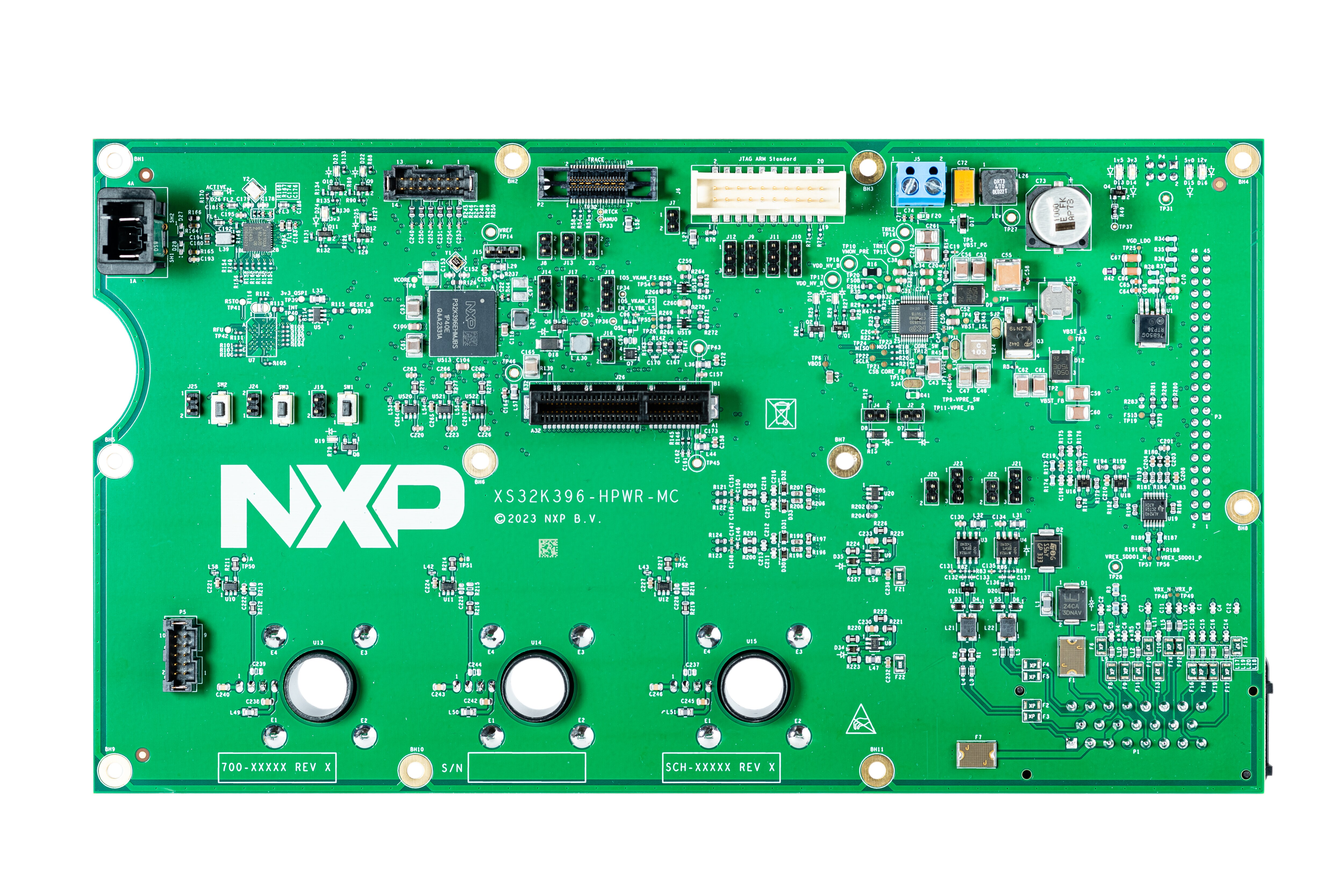
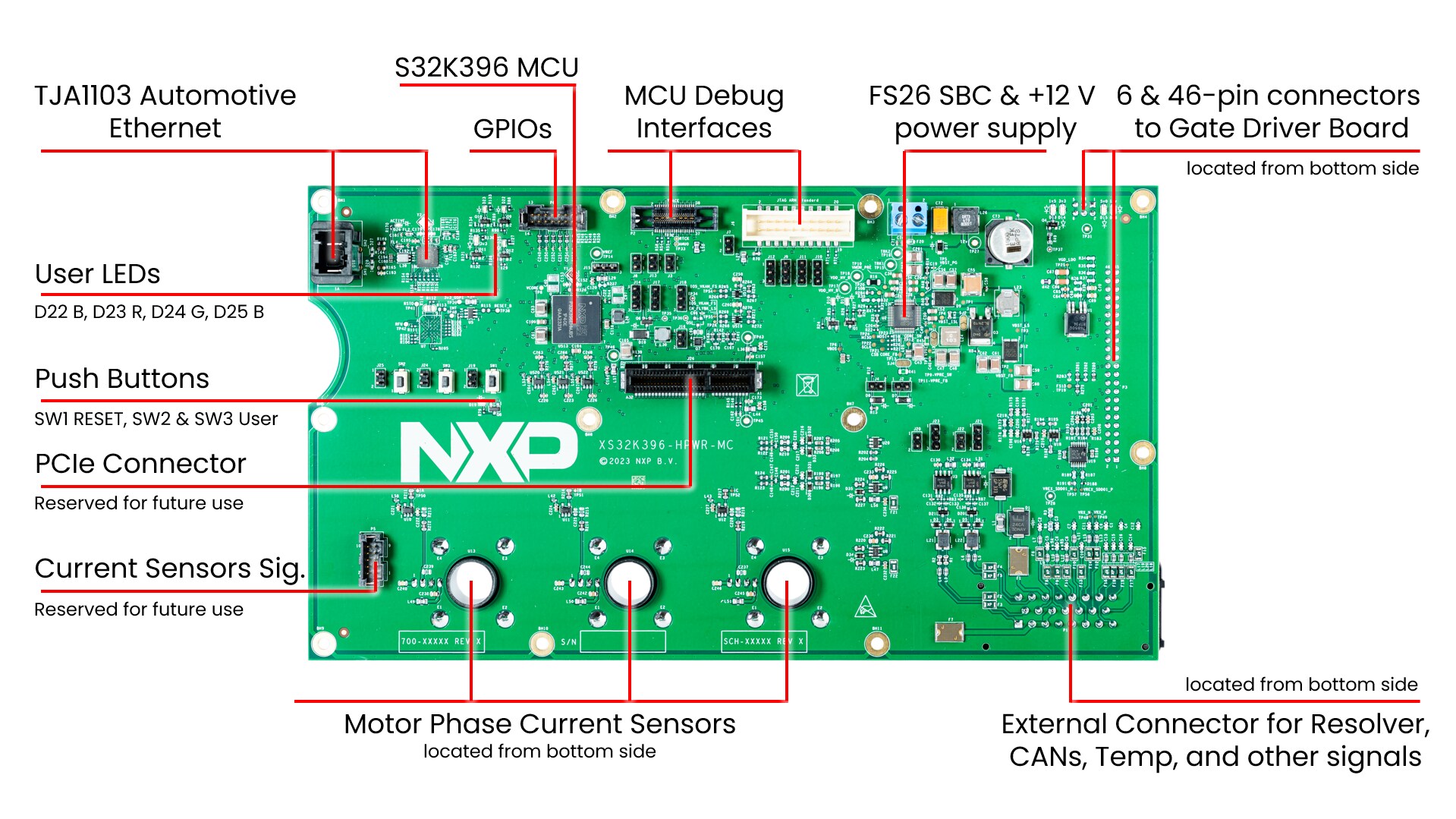
- MCU制御ボード (S32K396-HPWR-MC)
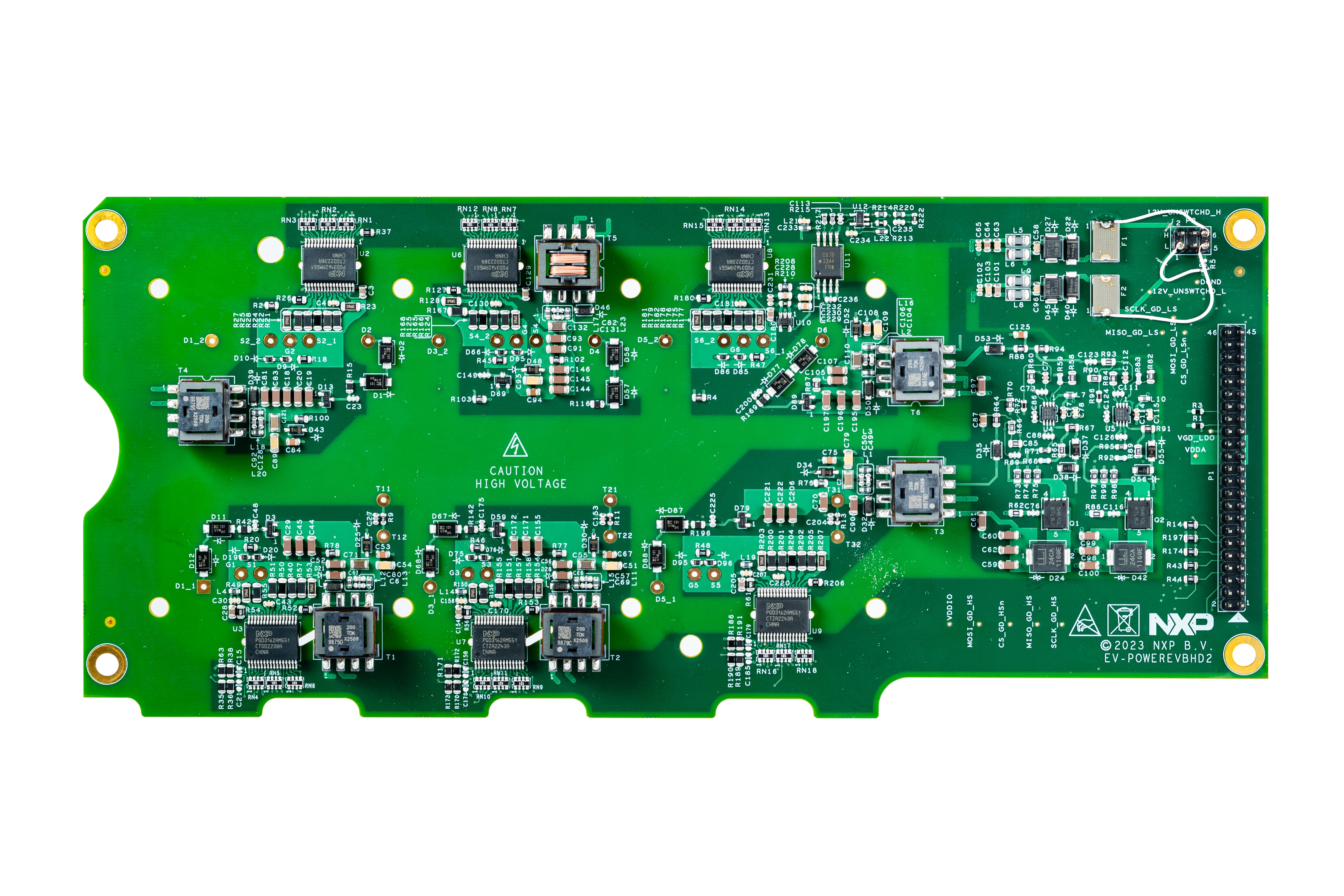
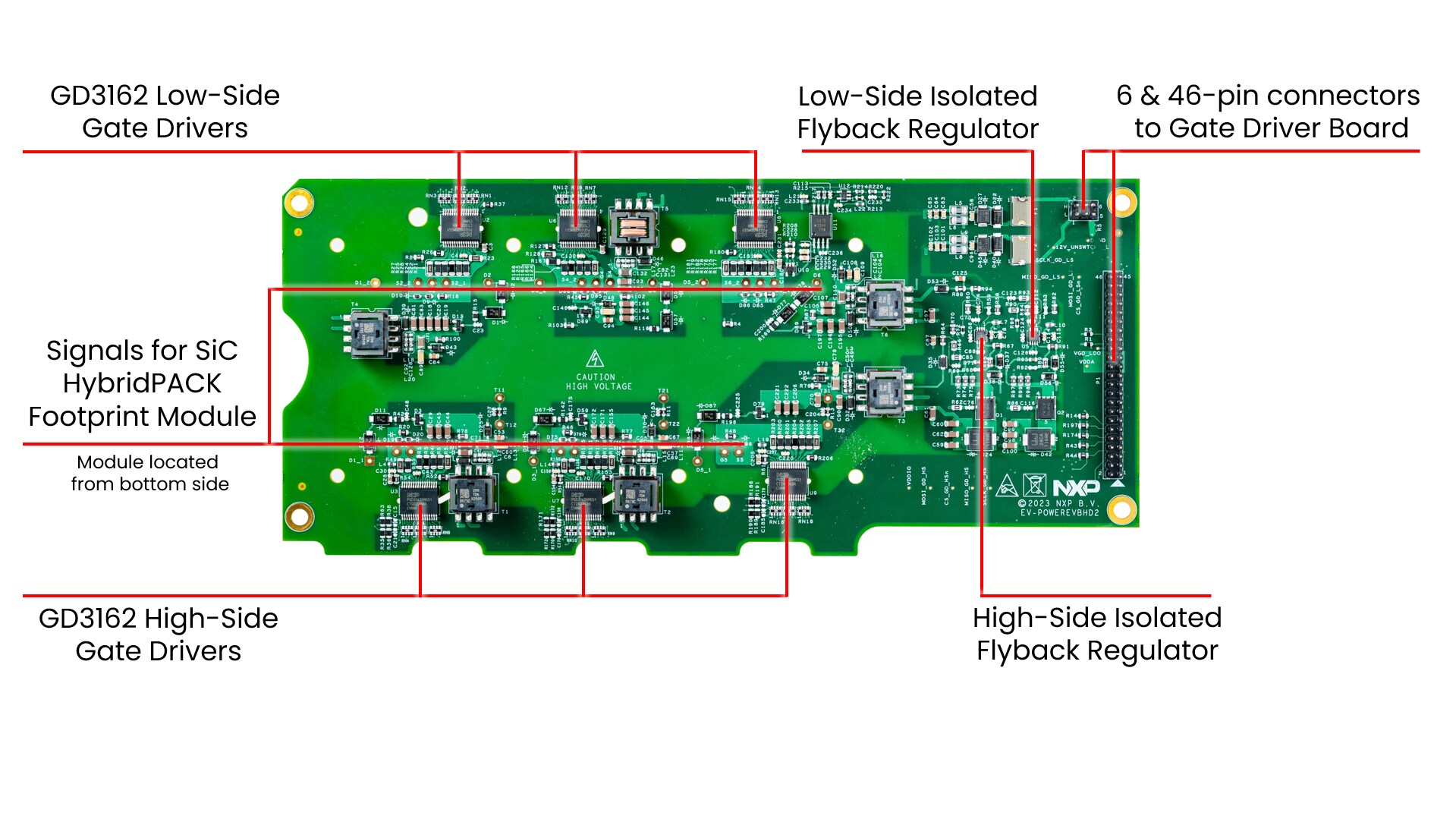
- ドライバ制御ボード (EV-POWEREVBHD2)
- ホール・エフェクト電流センサ向けの三相出力バスバー
- S32K396-HPWR-MCボードとEV-POWEREVBHD2ボード間の接続用6ピンおよび46ピン・ヘッダ・コネクタ
EVトラクション・インバーター制御リファレンス・デザイン第3世代を構築するには、EV-INVERTERGEN3キットの他に、追加のハードウェアが必要です。NXPのパートナーであるVepcoがそのようなコンポーネントを提供していますが、お客様がトラクション・インバーターのセットアップを独自に構築することもできます。
- SiC HybridPACKフットプリント・モジュール
- SiC HybridPACKフットプリント・モジュールに対応した冷却板またはウォーター・ジャケット
- DCリンク・キャパシタとSiC MOSFETモジュール間のバスバー
- DCリンク・キャパシタ
- 23ポジション信号コネクタAMPSEAL (PN 770680-1)(オプション)
- 信号コネクタからモーター・レゾルバ励起への高電圧シールド・ケーブル(2線)(オプション)
- 信号コネクタからモーター・レゾルバ・センス信号、CAN、信号などへの低電圧シールド・ケーブル(21線)(オプション)
- S32K396-HPWR-MC MCU制御ボードをEV-POWEREVBHD2ドライバ制御ボードに接続するための46ピン・フラット・リボン・ケーブル(オプション)
- コンポーネントの機械的支持のためのボード・スタンドオフ(オプション)
トラクション・インバータの開発には、次のツールとコンポーネントが必要です。
- 12 V低電圧DC電源
- 高電圧DC電源(例:モーター用の800 VDC程度の電源)
- USB-CANインターフェース(例:PCAN-USB)
- Arm互換JTAGデバッグ・インターフェース(例:PEmicro Multilinkデバッグ・プローブ)
- 三相永久磁石同期 (PMSM) モーター
- 電源入力用の高電圧ケーブル(2線)
- モーター用の高電圧ケーブル(3線)
- 12 V DC電源からMCU制御ボードに電源を供給するための低電圧ケーブル

2. ソフトウェアの入手
資格情報を使用してnxp.comにサインインします。
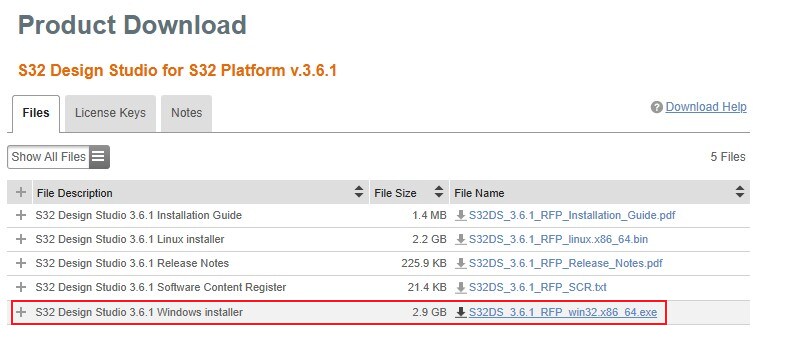
2.1 S32 Design Studioの入手
S32 Design Studio for S32 Platformをダウンロードしてインストールします。
S32 Design Studioのダウンロード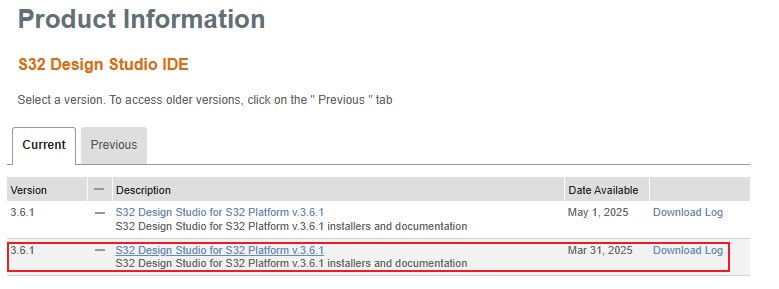
2.3 RTDドライバのインストール
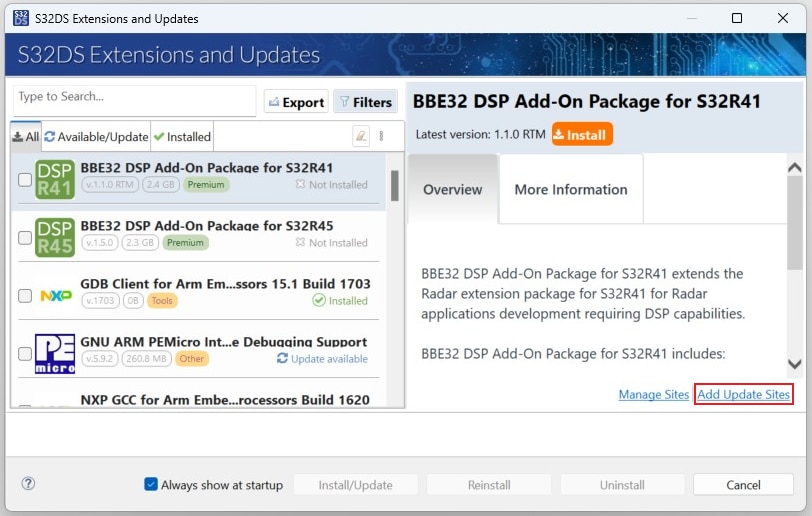
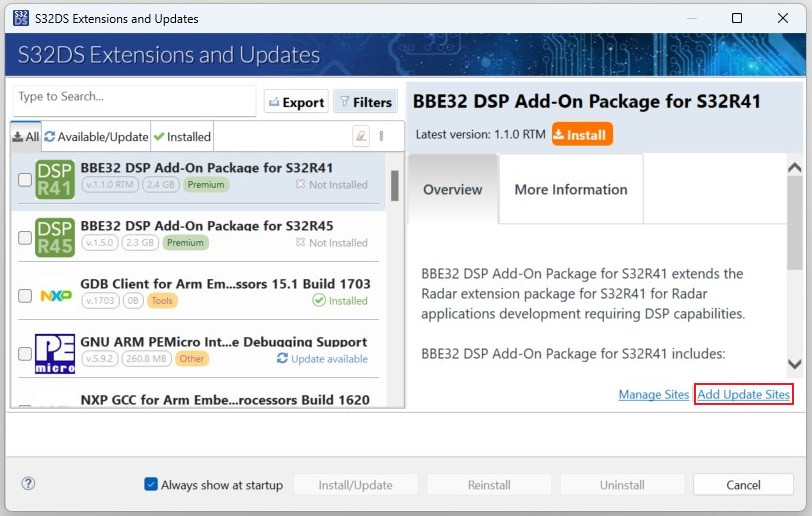
S32DSで、トップ・メニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
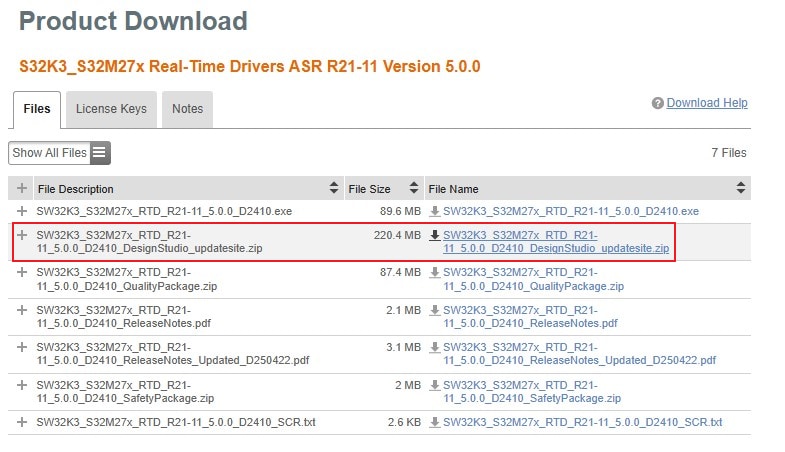
[Add Update Sites(更新サイトを追加)]をクリックし、ダウンロードしたRTD *.zipファイルを参照します。
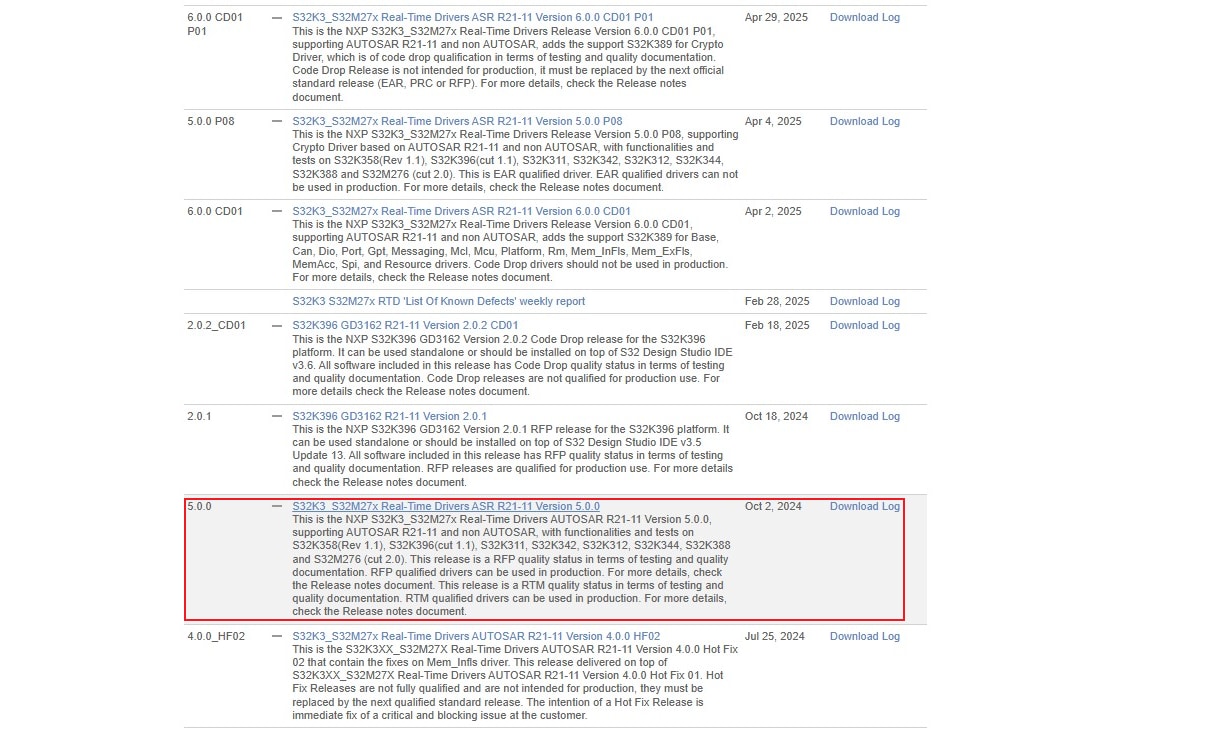
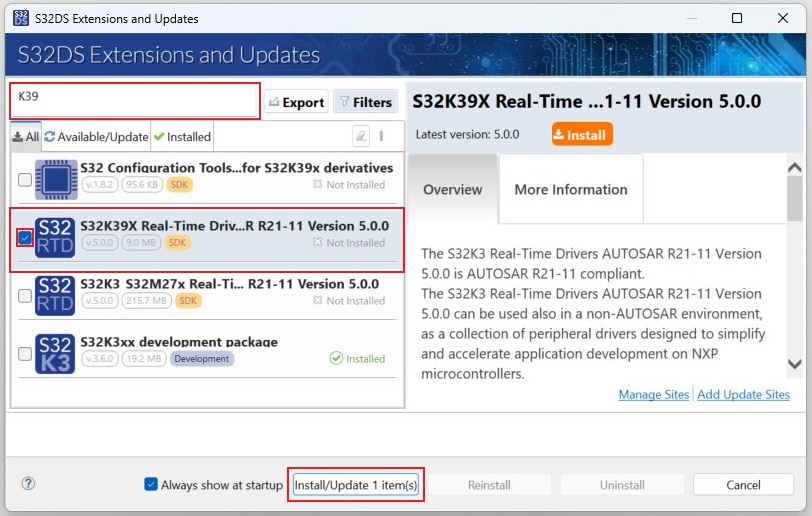
S32K39X Real-Time Drivers ASR R21-11 Version 5.0.0を検索して選択し、インストールします。
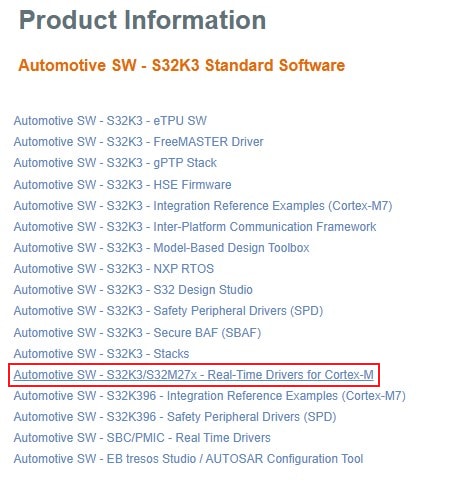
2.4 GD3162ドライバのダウンロード
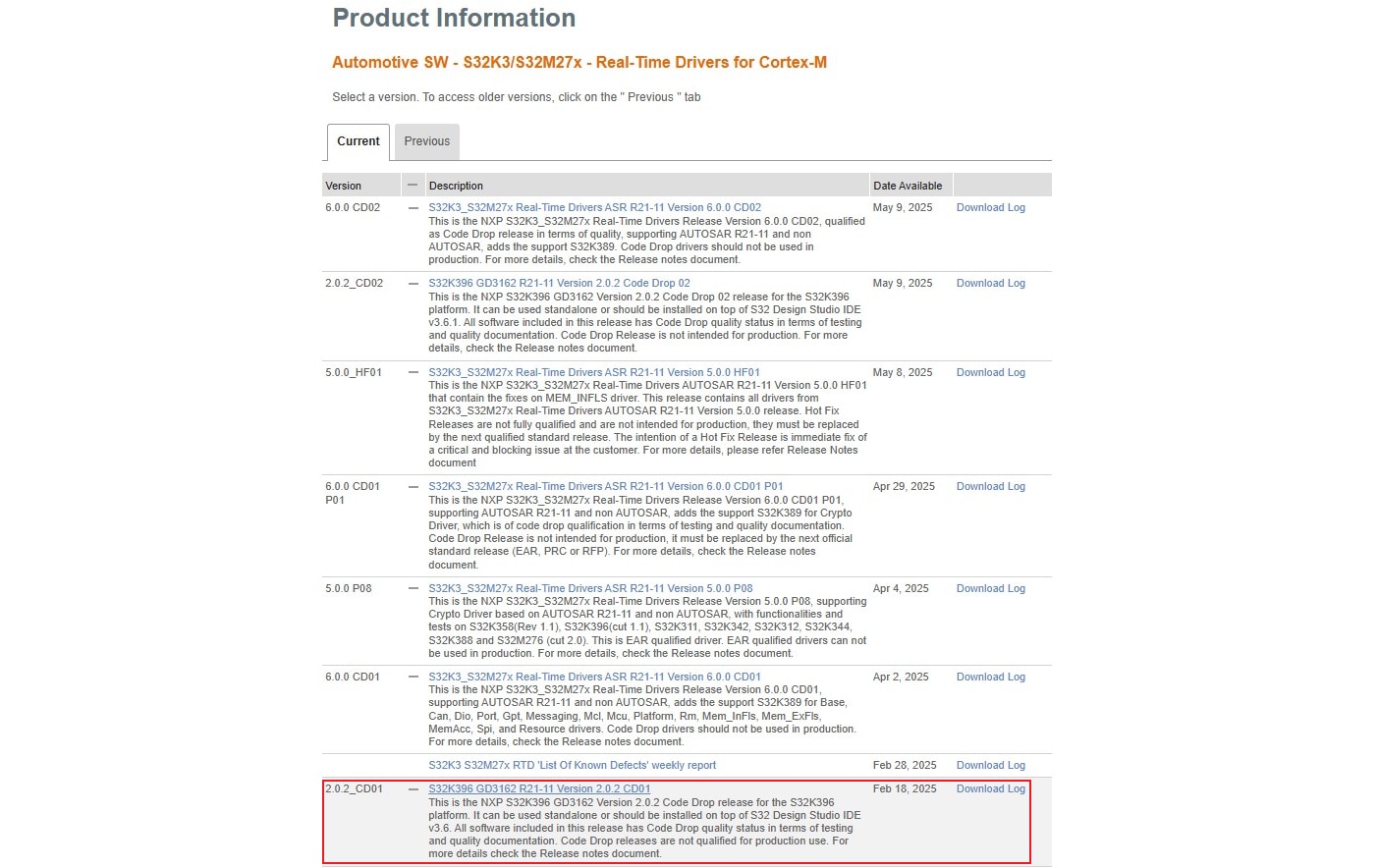
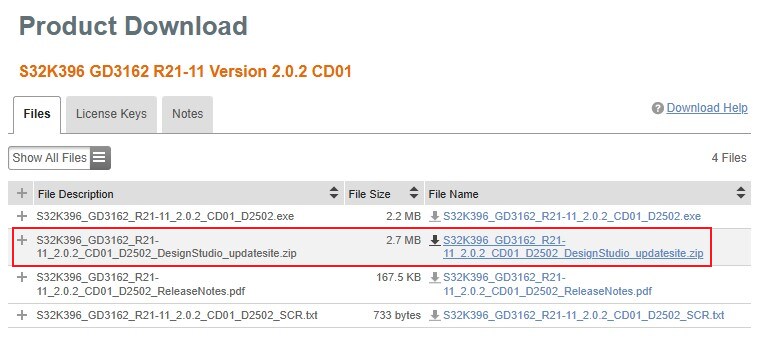
Automotive SW - S32K3/S32M27x - Real-Time Drivers for Cortex-MパッケージからS32K396 GD3162 R21-11 Version 2.0.2 CD01ドライバをダウンロードします。
2.5 GD3162ドライバのインストール
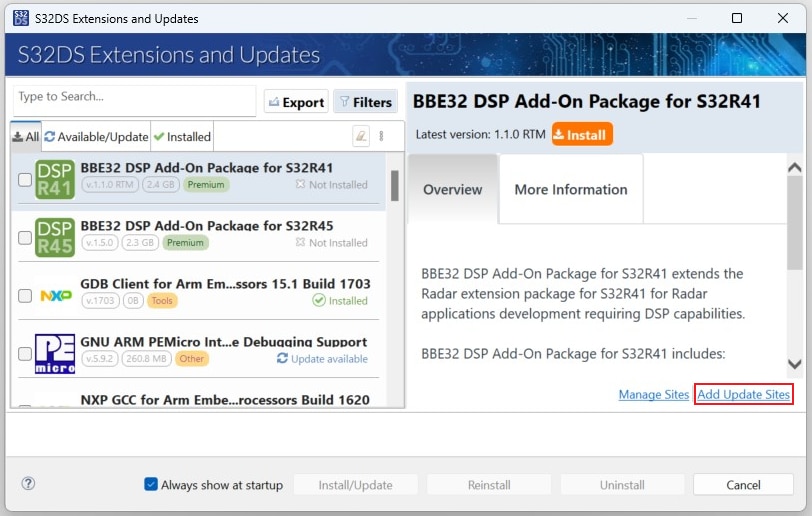
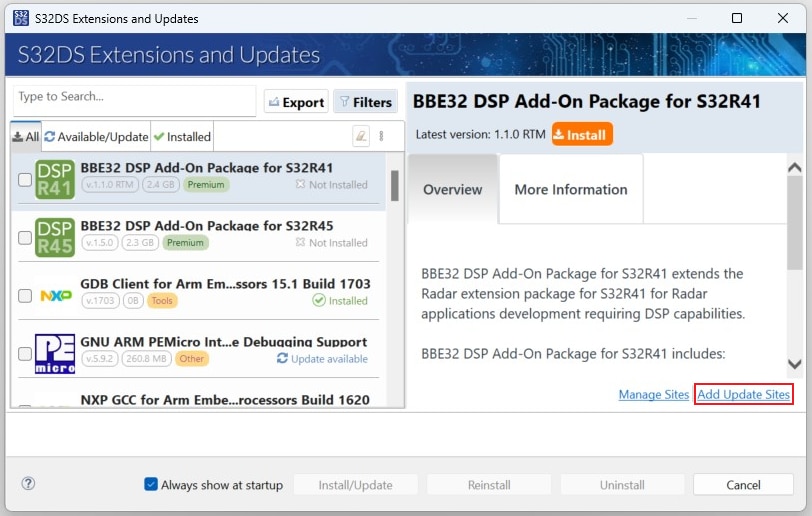
S32DSで、トップ・メニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
[Add Update Sites(更新サイトを追加)]をクリックし、ダウンロードしたGD3162更新サイト・ファイルを参照します。
 GD3162ドライバを選択してインストールします。
GD3162ドライバを選択してインストールします。 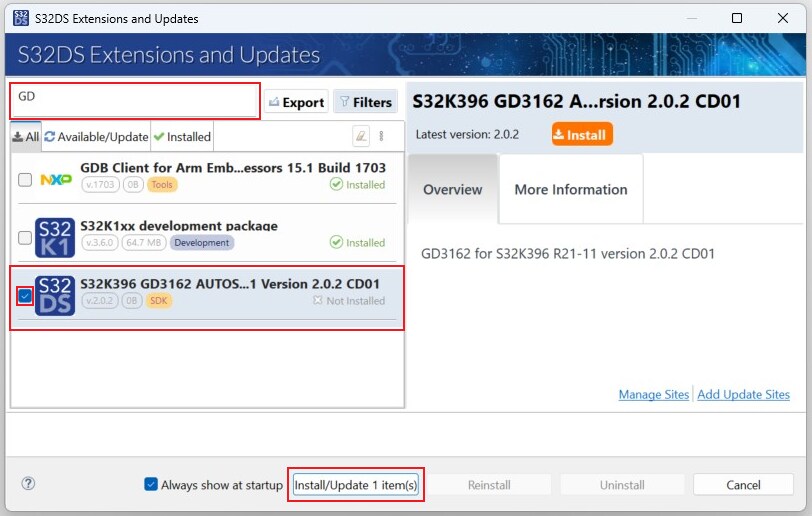
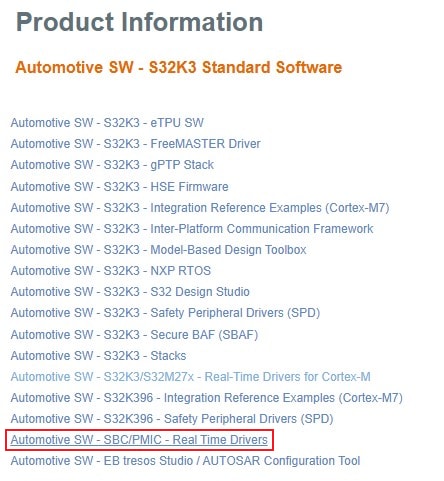
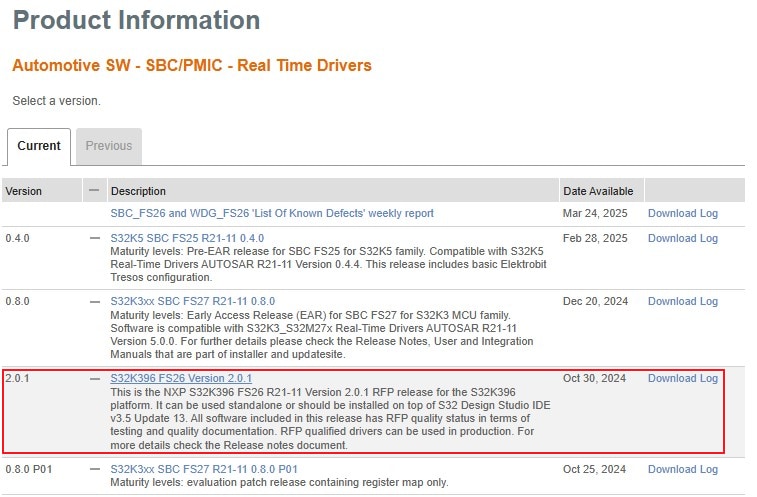
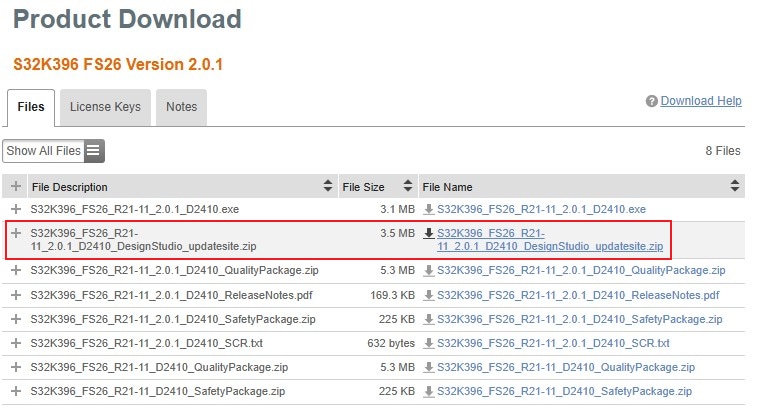
2.7 FS26ドライバのインストール
S32DSで、トップ・メニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
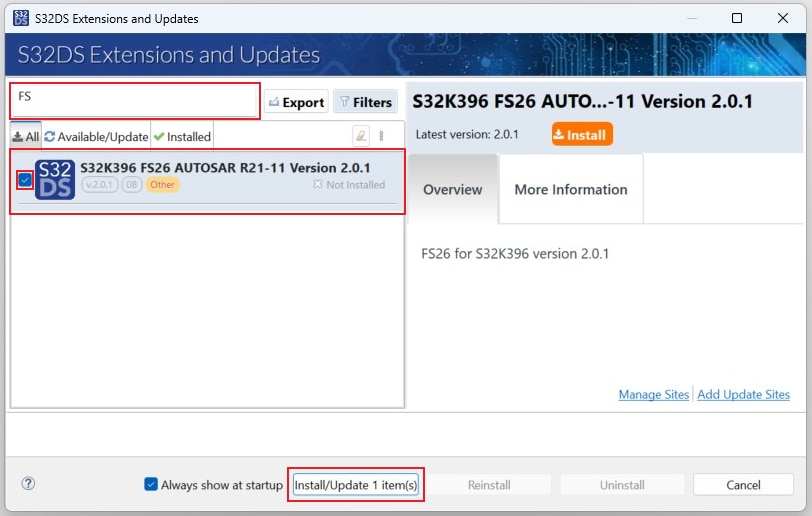
[Add Update Sites(更新サイトを追加)]をクリックし、ダウンロードしたS32K396 FS26ドライバ更新サイト・ファイルを参照します。
FS26ドライバを選択してインストールします。

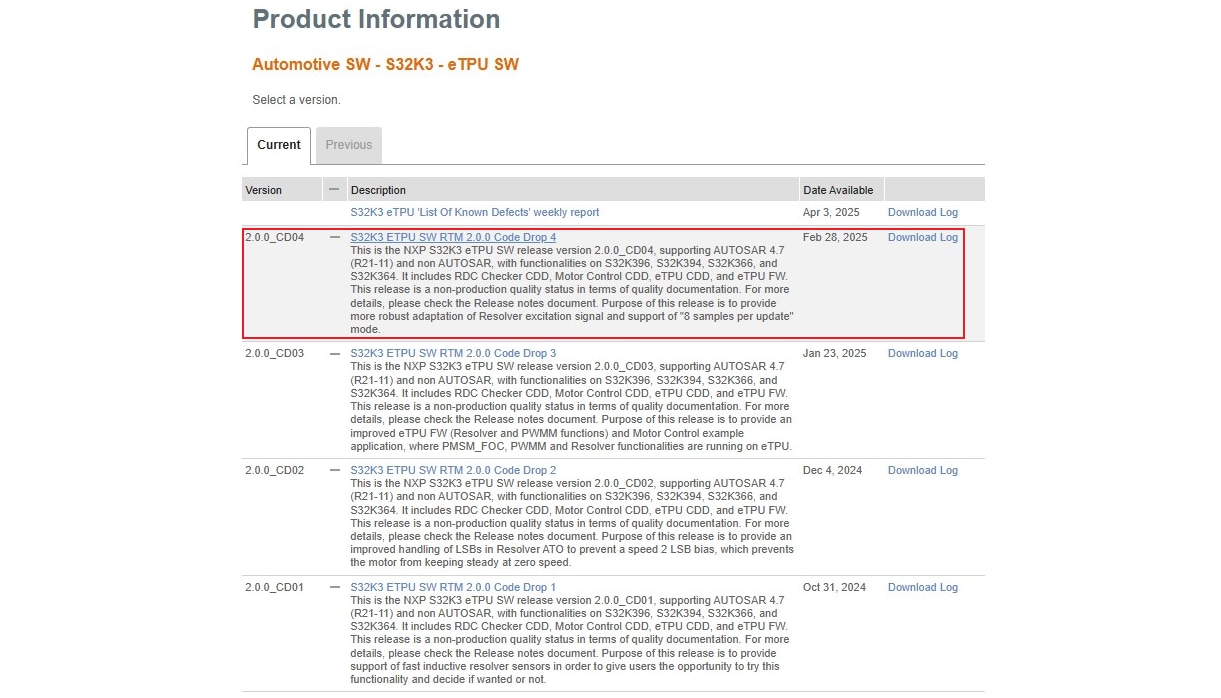
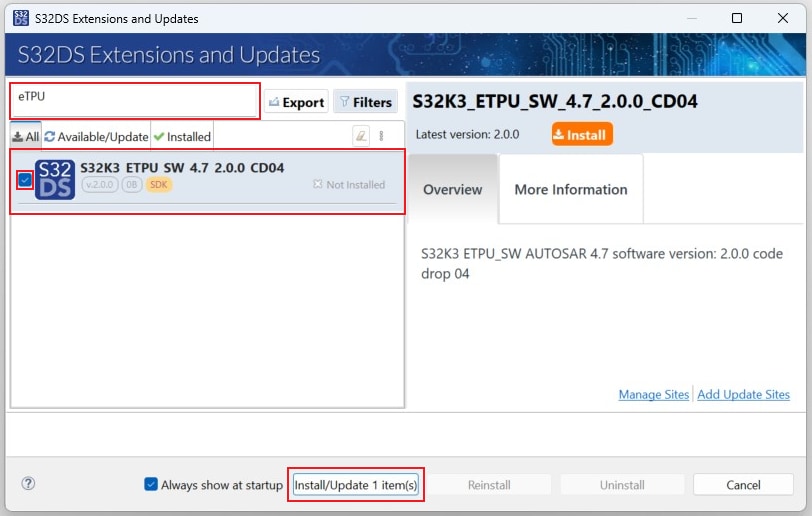
2.9 eTPU SWのインストール
S32DSで、トップ・メニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
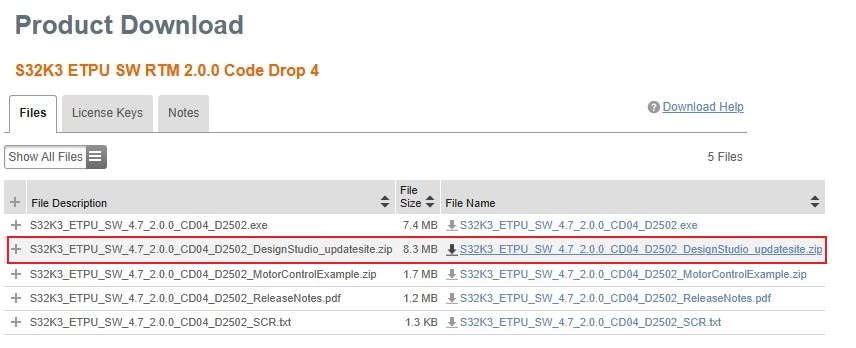
[Add Update Sites(更新サイトを追加)]をクリックし、ダウンロードしたTPU SW更新サイト・ファイルを参照します。
eTPU SWを選択してインストールします。
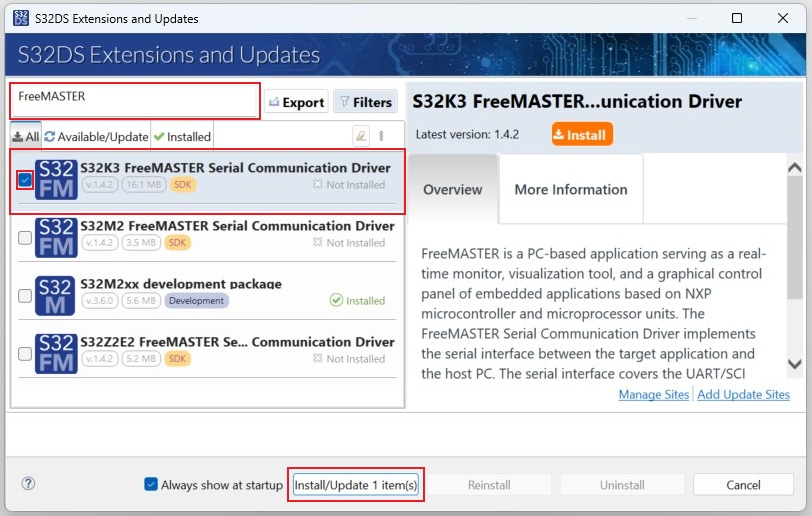
2.10 FreeMASTER通信ドライバの入手
S32DSで、トップ・メニューから[Help(ヘルプ)]→[S32DS Extensions and Updates(S32DSの拡張と更新)]の順に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]ダイアログを開きます。
S32K3 FreeMASTER通信ドライバを選択してインストールします。
2.14 CANノード・ドライバの入手(オプション)
必要に応じて、CANインターフェース用のドライバをダウンロードしてインストールします。たとえばPCANインターフェースを使用する場合は、PEAK SystemのWebページでインターフェースを選択した後で、ダウンロードのセクションからWindows用デバイス・ドライバとPCAN-Viewアプリケーションをダウンロードします。ダウンロードしたドライバとGUIツールをインストールします。
3. プラットフォームをセットアップしてホストPCに接続
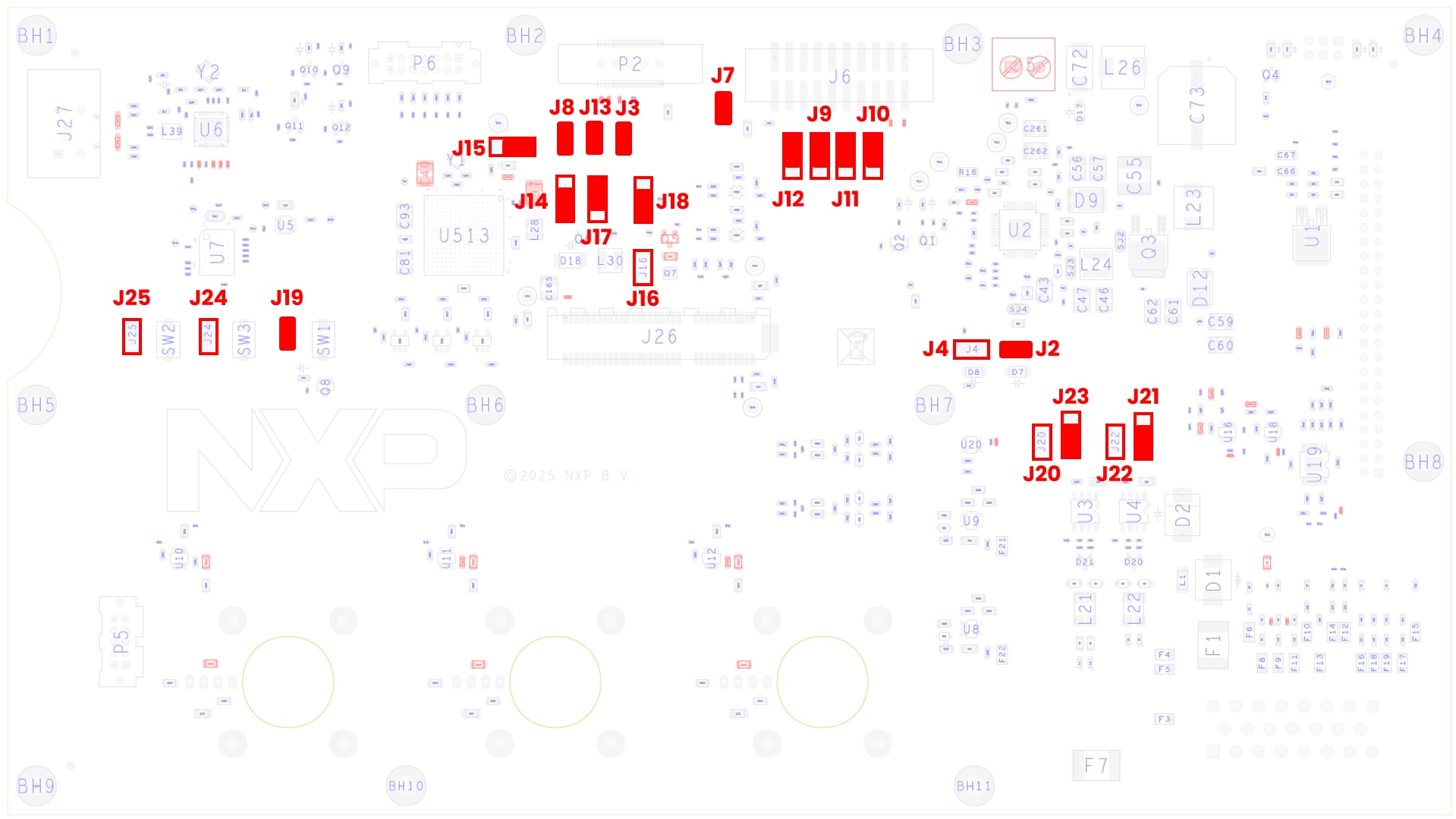
3.1 デフォルトのジャンパ位置
S32K396-HPWR-MC MCU制御ボードのデフォルトのジャンパ位置を確認します。
| ジャンパ | 状態 | 備考 |
|---|---|---|
| J2 | 閉 | FS26_DEBUGピン電圧がFS26 VBOS信号に接続されます。ウォッチドッグは無効化され、FS26がデバッグ・モードで起動します |
| J3 | 閉 | MCURESET_B信号がFS26 WAKE2入力に接続されます |
| J4 | 開 | FS26_DEBUGピンが分圧器から切断されます |
| J7 | 閉 | VDD_HV_Aが20ピンArm標準JTAGコネクタに接続されます |
| J8 | 閉 | MCU RESET_B信号が38ピンArm ETM Mictorコネクタに接続されます |
| J9 | 1-2 | MCU JTAG TMS信号が20ピンArm標準JTAGコネクタに接続されます |
| J10 | 1-2 | MCU JTAG TDO信号が20ピンArm標準JTAGコネクタに接続されます |
| J11 | 1-2 | MCU JTAG TCK信号が20ピンArm標準JTAGコネクタに接続されます |
| J12 | 1-2 | MCU JTAG TDI信号が20ピンArm標準JTAGコネクタに接続されます |
| J13 | 閉 | MCU RESET_B信号が20ピンArm標準JTAGコネクタに接続されます |
| J14 | 2-3 | 1.5 V PMOSトランジスタ・レギュレータの入力がVDD_HV_Bパワー・ドメインに接続されます |
| J15 | 2-3 | VREFH_R2Rリファレンス(すべてのADCのリファレンス電圧)がHDD_HV_Aから導出されます |
| J16 | 開 | 1.5 V PMOSトランジスタ・レギュレータが切断されます |
| J17 | 1-2 | 1.5 V PMOSトランジスタがVDD_DCDC MCU信号により駆動されます |
| J18 | 2-3 | 1.1 V NMOSレギュレータがNMOS_CTRL信号により駆動されます |
| J19 | 閉 | SW1 RESETボタンがRESET_B信号に接続されます |
| J20 | 開 | CAN0トランシーバ・スタンバイ信号がPTE5ピンから切断されます |
| J21 | 2-3 | CAN3トランシーバのスタンバイ信号がプルダウンされます |
| J22 | 開 | CAN3トランシーバのスタンバイ信号がPTF29ピンから切断されます |
| J23 | 2-3 | CAN0トランシーバのスタンバイ信号がプルダウンされます |
| J24 | 開 | SW3ユーザー・ボタンのバイパス - PTG14ピンでHDD_HV_A電圧 |
| J25 | 開 | SW2ユーザー・ボタンのバイパス - PTG4ピンでHDD_HV_A電圧 |
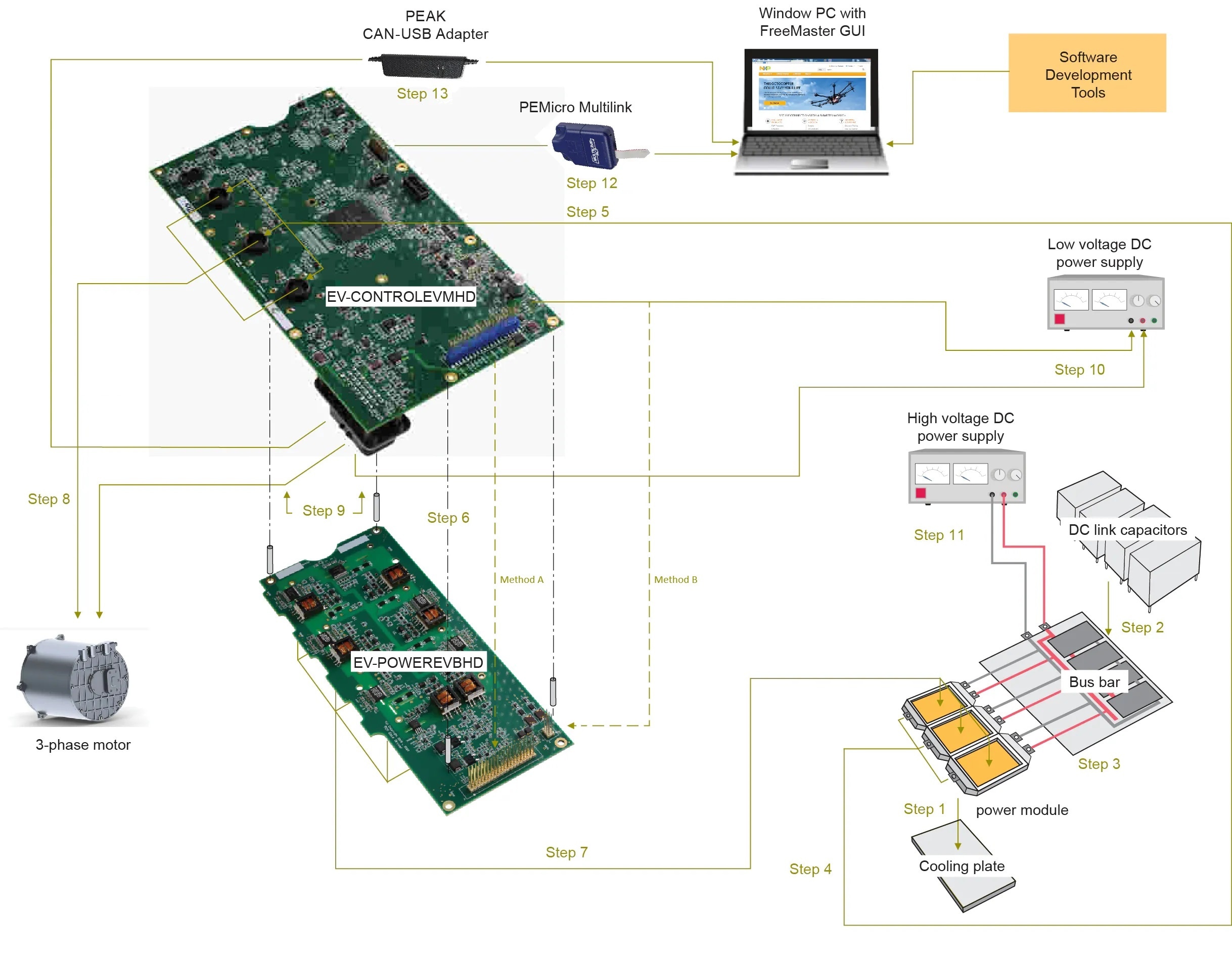
3.2 インバーターの組み立て
NXPのパートナーであるVepcoが提供するハードウェア・コンポーネントのセットアップを利用してインバーターを構築できますが、お客様はNXP EV-INVERTERGEN3コンポーネントに基づいて独自のトラクション・インバーターを構築することもできます。次の章 (3.3) では、Vepcoプラットフォームを使用せずにインバーターを構築する手順を紹介しています。Vepcoプラットフォームを使用する場合は、第3.3章をスキップし、第3.4章のステップ8に進んでください。
3.3 カスタム・ハードウェアのセットアップ
以下の手順では、電気的な接続についてのみ説明しています。お客様のプラットフォーム内のコンポーネントを支持して接続するために必要な物理的構造物(バスバー、取り付け用ハードウェアなど)は、お客様自身で組み立てていただく必要があります。
- 6パック(三相)SiCパワー・モジュール (Wolfspeed ECB2R1M12YM3LlSiC) を冷却プレートに取り付けます。
- DCリンク・キャパシタをバスバーに取り付けます
- パワー・モジュール上の3つのプラス側DC電源コネクタをバスバー上の対応するコネクタに接続します。パワー・モジュール上の3つのマイナス側DC電源コネクタをDCリンク・バスバー上の対応するコネクタに接続します。
- 電源モジュールの三相出力コネクタに高電圧ケーブルを接続します。次に、S32K396-HPWR-MCボード上の3つのモーター相電流センサ(U13、U14、U15)のいずれかを経由して、各線を配線します。
- 前の手順で電流センサに配線した3本の高電圧ケーブルを、モーターに接続できるように準備します。A、B、Cの接続が一致していることを確認します。
- イネーブルメント・キットの2つのボードを接続します。接続は、以下の2つの方法で行うことができます。
- 方法A:46ピン・コネクタ(P3とP4)および+12電源コネクタ(P4とP2)を直接接続することで、S32K396-HPWR-MCボードをEV-POWEREVBHD2ボードの上に取り付けます。下側のボードのピンが上側のボードのコネクタに完全に挿入されていることを確認します。2つのボードの間にスタンドオフを取り付け、構造的に支持します。この方法でボードを接続した場合、EV-POWEREVBHD2ボードの上部にあるテスト・ポイントとコンポーネントへのアクセスが妨げられる点に注意してください。
- 方法B:2つのボードをケーブルで接続します。それには、S32K396-HPWR-MCボードのコネクタP3とEV-POWEREVBHD2ボードのコネクタP1間に46ピン・リボン・ケーブルを接続します。この構成では、EV-POWEREVBHD2ボードへはS32K396-HPWR-MCボードとは別個に給電する必要があります。ステップ8を参照してください。
- EV-POWEREVBHD2ボードをパワー・モジュールに接続します。パワー・モジュールの上面のピンとEV-POWEREVBHD2ボードの底部のパワー・モジュール・コネクタの位置を合わせて、2つのユニットを合体させます。
3.4 インバーター・ハードウェアのセットアップ
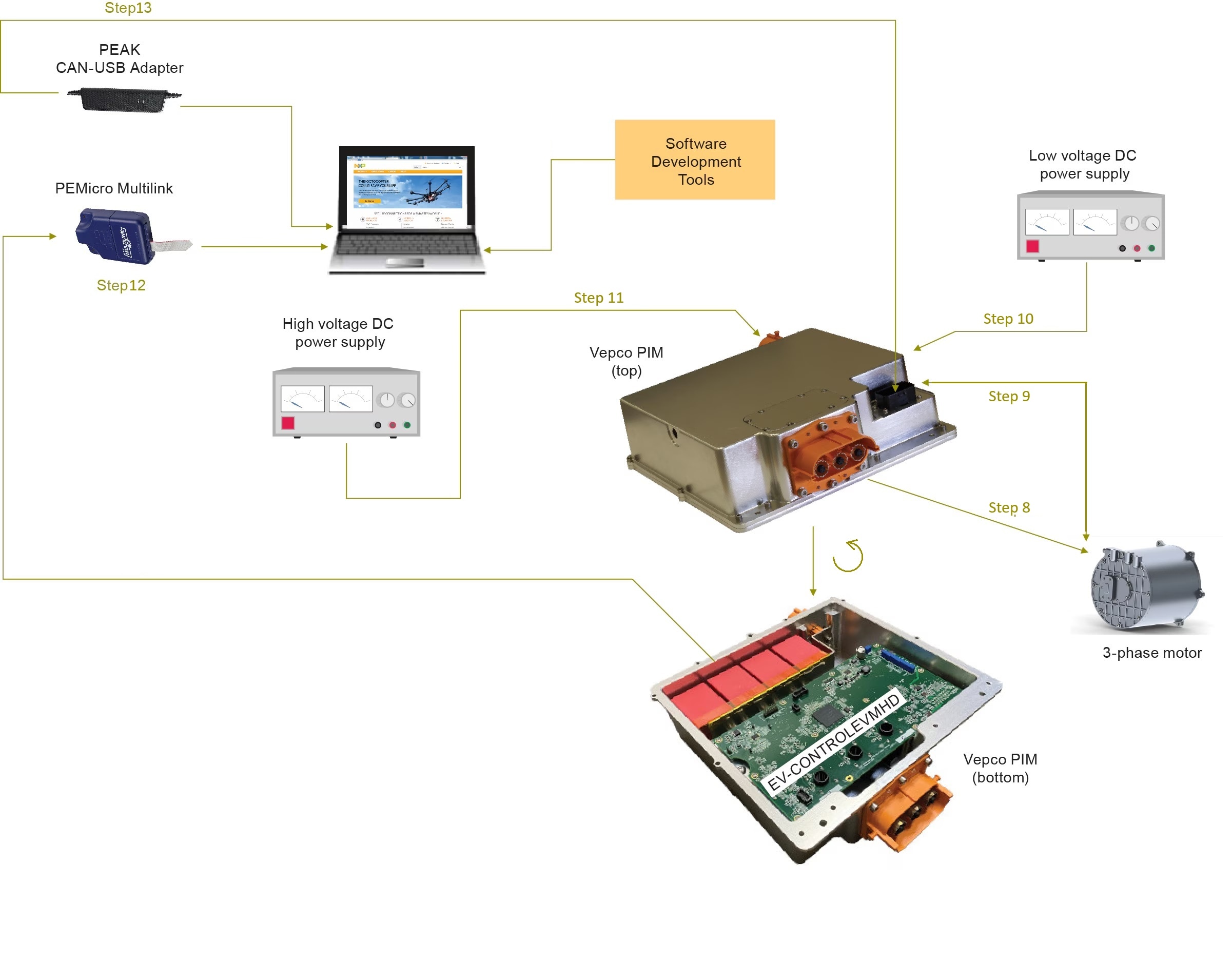
- 高電圧ケーブルでモーターをパワー・インバーターに接続します
- S32K396-HPWR-MCボードの23ピンP1コネクタにモーター・レゾルバを接続します。以下のように接続します。
- 2線式高電力シールド・ケーブルを使用して、23ピンP1コネクタのピン14とピン21(レゾルバ励磁信号)をモーター上の対応する接続部に接続します。シールド・グランドを23ピン・コネクタのピン6に接続します
- 低電力ケーブルを使用して、23ピン・コネクタのピン8、15、22、23(レゾルバの検出信号)をモーター上の対応する接続部に接続します。シールド・グランドを23ピン・コネクタのピン9に接続します。23ピン・コネクタの信号一覧表は次の第3.5章にあります
- 低電圧DC電源 (12 V) をS32K396-HPWR-MCボードのコネクタP4に接続します。ステップ6の方法Bを使用してS32K396-HPWR-MCボードをEV-POWEREVBHD2ボードに接続した場合は、低電圧DC電源からEV-POWEREVBHD2ボードの+12電源コネクタ (P2) への接続が追加で必要になります。(ステップ6の方法Aに従って2つのボードを取り付けた場合、EV-POWEREVBHD2にはS32K396-HPWR-MCボードの+12電源コネクタを介して直接電力が供給されます)
- 2線式高電圧ケーブルを使用して、高電圧/大電流DC電源のプラス側コネクタをバスバーのプラス側のDCリンク・キャパシタ・コネクタに接続します。次に、高電圧/大電流DC電源のマイナス側コネクタをバスバーのマイナス側のDCリンク・キャパシタ・コネクタに接続します。 警告:
DC高電圧の扱いを誤ると死亡事故や重篤な障害を負う危険性があります。細心の注意を払って使用してください
- 20ピンArm JTAGデバッガ(PEmicro Multilinkなど)のヘッダを、ピン1のマークを合わせて、S32K396-HPWR-MCのコネクタJ6に接続します。PEmicro MultilinkのUSBケーブルをホストPCに接続します。PEmicro Multilinkの両方のLEDライトが点灯し、JTAGバスが通電中で通信可能であることを示します
- USB-CANインターフェース・アダプタ (PEAK System) を、S32K396-HPWR-MCボードの底面にある23ピンコネクタとWindows PCのUSBポートに接続します。
3.5 23ピン・コネクタの説明

| ピン | 記号 | 説明 | 値 |
|---|---|---|---|
| 1 | EXT_CANH_A | CANAハイ | TTL (Transistor-Transistor Logic) 0 V~5 V |
| 2 | EXT_DGND | デジタル・グランド | 0 V、100 mA |
| 3 | EXT_DGND | デジタル・グランド | 0 V、100 mA |
| 4 | EXT_12V_IGNIT | イグニッション | 0 V~16 V |
| 5 | EXT_MTRTD1_RTRN | モーターRTD 1リターン | 抵抗– |
| 6 | EXT_RSLVR_DRIVE_SHIELD | レゾルバ励磁シールド | 0 V |
| 7 | EXT_RSLVR_SENSE_SHIELD | レゾルバ・センス・シールド | 0 V |
| 8 | EXT_RSLVR_S1 | レゾルバ・センス S1 |
アナログ100 mA |
| 9 | EXT_CANL_A | CANAロー | TTL 0 V~5 V |
| 10 | EXT_FAULT_OUT | Fsb1 | TTL |
| 11 | EXT_DGND | - | - |
| 12 | EXT_MTRTD1_SIG | モーターRTD 1信号 | 抵抗+ |
| 13 | EXT_MTRTD2_SIG | モーターRTD 2信号 | 抵抗+ |
| 14 | EXT_RSLVR_R1 | レゾルバ励磁 R1 |
アナログ100 mA |
| 15 | EXT_RSLVR_S3 | レゾルバ・センス S3 |
アナログ100 mA |
| 16 | EXT_CANH_B | - | - |
| 17 | EXT_CANL_B | - | - |
| 18 | EXT_12V_UNSWTCHD | スイッチングなしの12 V | 10 V~16 V、2 A |
| 19 | EXT_GND_12V_RETURN | 12 V GND | 0 V、2 A |
| 20 | EXT_MTRTD2_RTRN | モーターRTD 2リターン | 抵抗– |
| 21 | EXT_RSLVR_R2 | レゾルバ励磁 R2 |
- |
| 22 | EXT_RSLVR_S2 | レゾルバ・センス S2 |
- |
| 23 | EXT_RSLVR_S4 | レゾルバ・センス S4 |
- |
4. モータ制御アプリケーションをMCUにインポートしてビルドおよびロード
EV-INVERTERGEN3モータ制御ボードの動作テストを行いましょう。
4.1 アプリケーションの選択とプロジェクトのインポート
インストール・ディレクトリで適切なPMSMモータ制御アプリケーションを選択します。
NXP\MC_DevKits\EV-INVERTERGEN3 インストールされているアプリケーション・ソフトウェア・プロジェクトをS32 Design Studio IDE for S32 Platformにインポートするには、次の手順に従います。
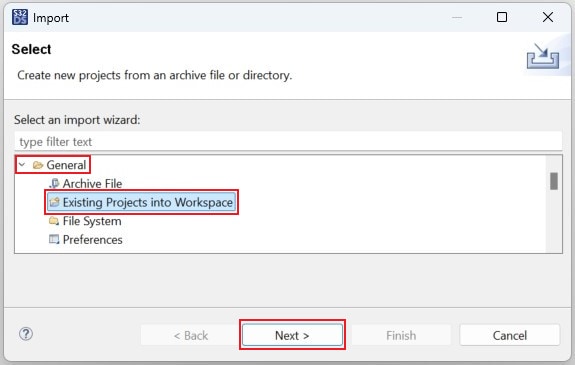
- S32DS for S32 Platformを起動します
- [File(ファイル)]→[Import(インポート)]に移動し、[General(全般)]→[Existing Projects into Workspace(既存プロジェクトをワークスペースへ)]を選択します
- アプリケーションのインストール・ディレクトリ
NXP\MC_DevKits\EV-INVERTERGEN3に移動して、[Select Folder(フォルダを選択)]をクリックします。次に、[Copy projects into workspace(プロジェクトをワークスペースにコピー)]オプションのチェックボックスをオンにします。[Finish(終了)]をクリックします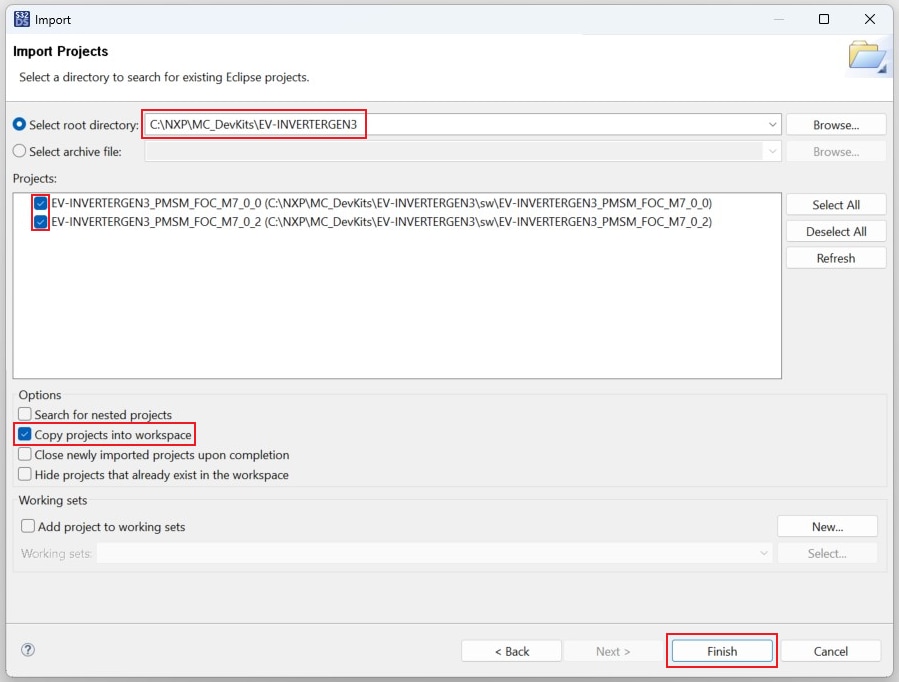
- しばらくすると、新しいウィンドウが表示されます。最初に
M7_0_0プロジェクトに関するウィンドウが、その後にM7_0_2プロジェクトに関するウィンドウが表示されます。[Yes To All(すべてはい)]をクリックして、両方のプロジェクト・ディレクトリの「.settings」フォルダを上書きします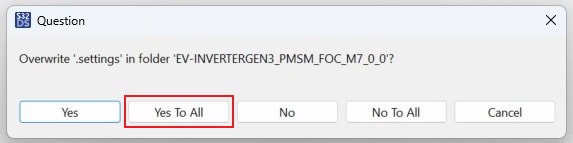
4.2 設定ツールの使用
- 1つ目のプロジェクトの構造を展開して
*.mexファイルをダブルクリックし、S32設定ツールのプロジェクト設定を開きます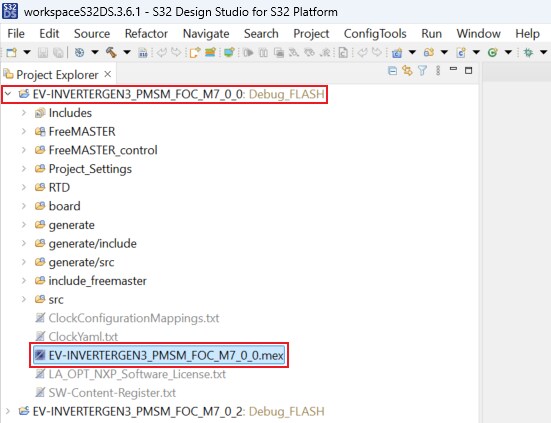
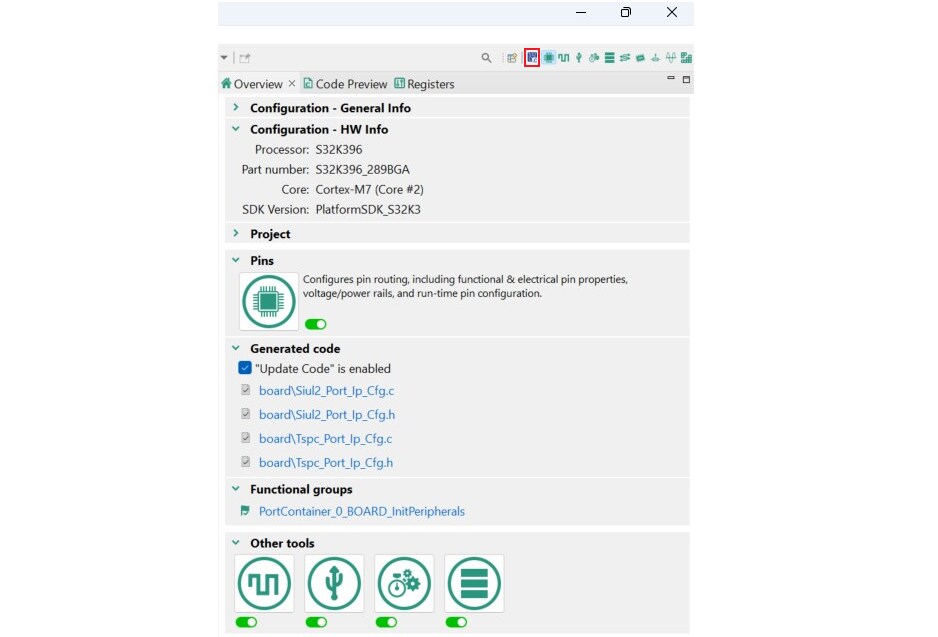
-
M7_0_0プロジェクトを設定していることを確認してから、[Update Code(コードの更新)]ボタンをクリックして設定ファイルを生成します。次に、S32設定ツールで、プロジェクト名の横にあるポップダウン・ボタンをクリックし、M7_0_2プロジェクト用の*.mexファイルを選択します。[Update Code accordingly(必要に応じてコードを更新)]をクリックします

4.3 ソフトウェアのアップロードとデバッグ
S32DSで、右上隅にあるボタンをクリックし、C/C++の画面に戻ります。
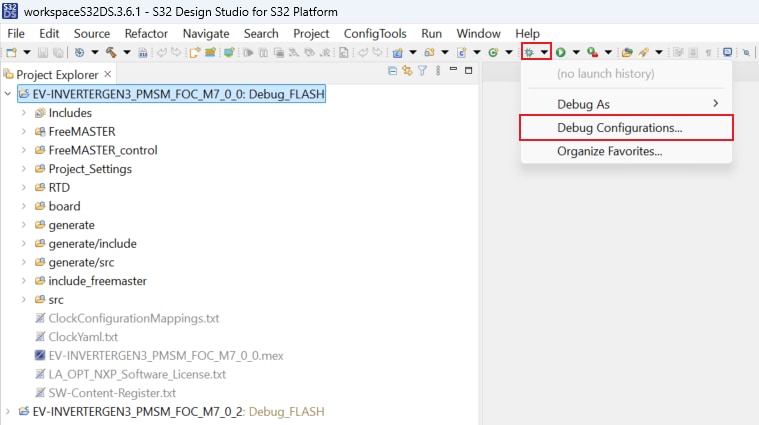
[Debug As(名前を付けてデバッグ)]メニューをクリックし、[Debug Configurations(デバッグ設定)]を選択します。
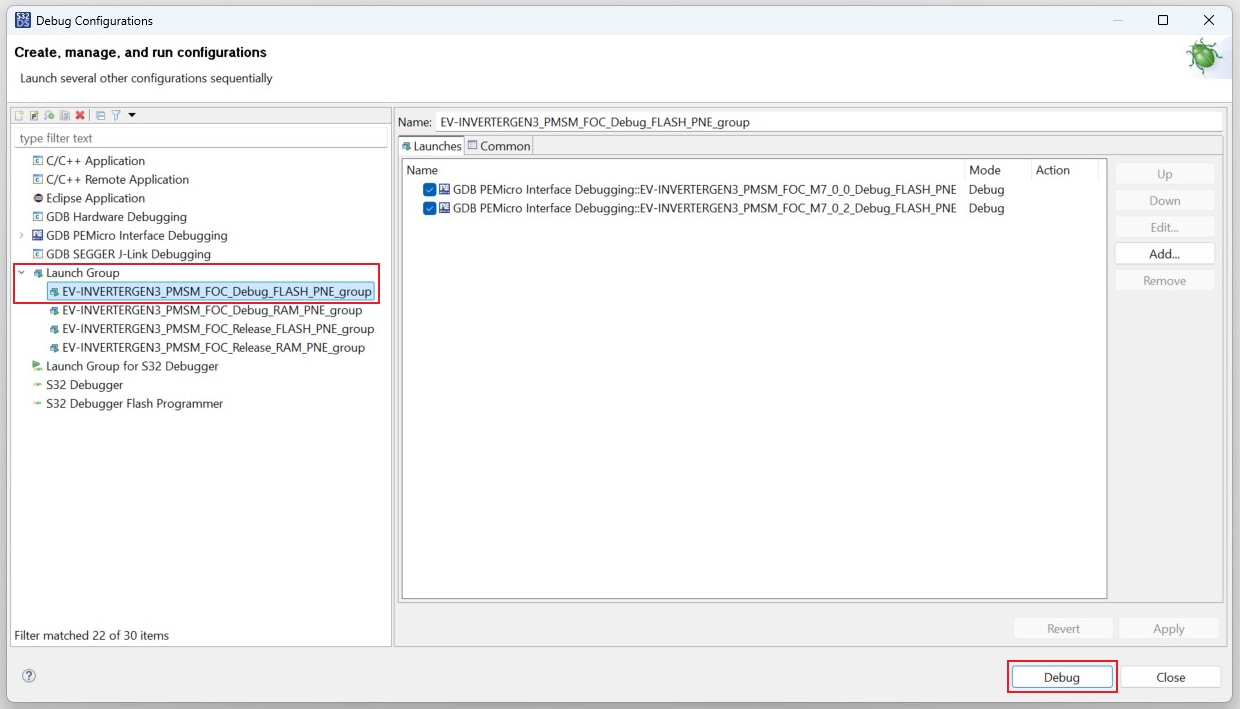
次に[Launch Group(起動グループ)]を展開し、最初の起動設定をクリックします。この設定によって、M7_0_0 プロジェクトとM7_0_2プロジェクトの両方がMCUにアップロードされます。[Debug(デバッグ)]をクリックすると、ソフトウェアがビルドされ、MCUにアップロードされます。
しばらくすると、新しいウィンドウが表示されます。[Remember my decision(選択内容を保存する)]チェックボックスをオンにして、[Switch(切り替え)]をクリックします。
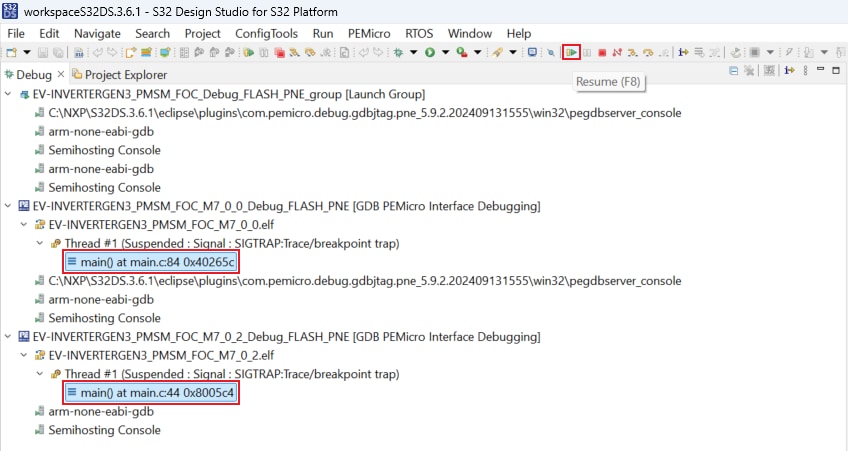
S32DSはデバッグ画面に切り替わります。まず、Ctrlキーを押しながら両方のプロジェクトのmain()ファイルをクリックして、選択状態にします。次に[Resume(再開)]をクリックして(またはF8キーを押して)両方のプロジェクトを実行します。
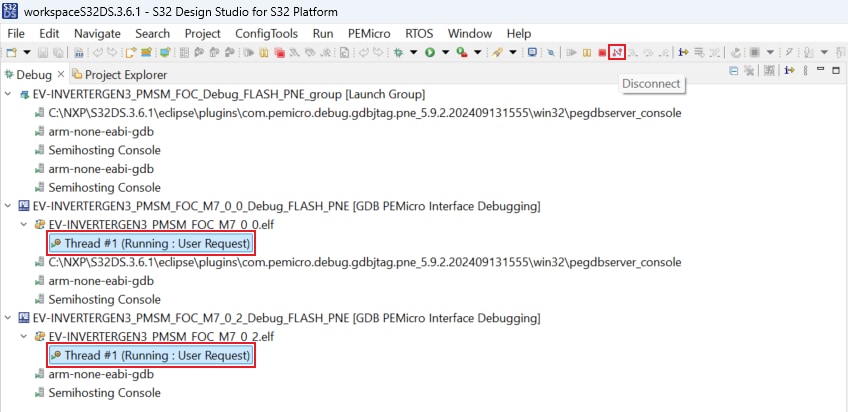
[Disconnect(切断)]をクリックすると、S32DS IDEデバッガとFreeMASTERツールの間の干渉を回避できます。
4.4 デバッグ・ツールのセットアップ
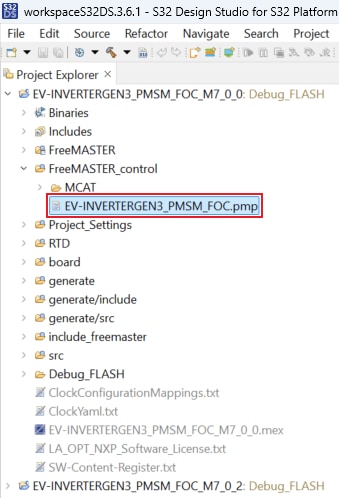
FreeMASTERアプリケーションを起動します。
*.pmp FreeMASTERプロジェクト
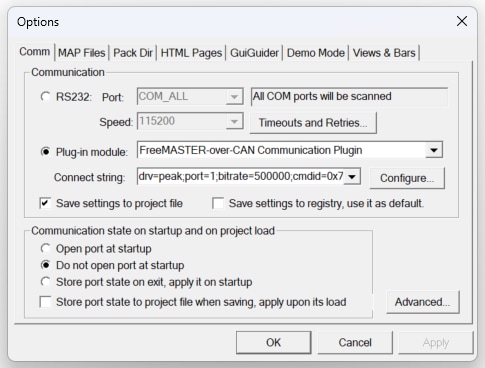
通信を有効にするには、FreeMASTERツールバーで[Go]をクリックします(またはCtrl+Gを押します)。
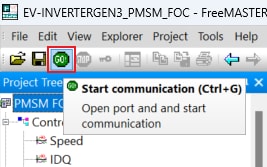
正常に通信が行われている場合、下部のステータス・バーに次のように表示されます。 CAN;drv=peak;port=1;bitrate=500000;cmdid=0x7aa;rspid=0x7aa;tmo=1000
5. アプリケーションの制御
5.1 モーターを回転させる
モーターのパラメータ(必要な場合の手順)
Vepcoモーターを使用しない場合は、使用するPMSMモーターに応じて、モーターのパラメータを編集する必要がある場合があります。モータ制御アプリケーション・チューニング (MCAT) ツールの[Parameters(パラメータ)]タブを開き、左側の値を編集します。
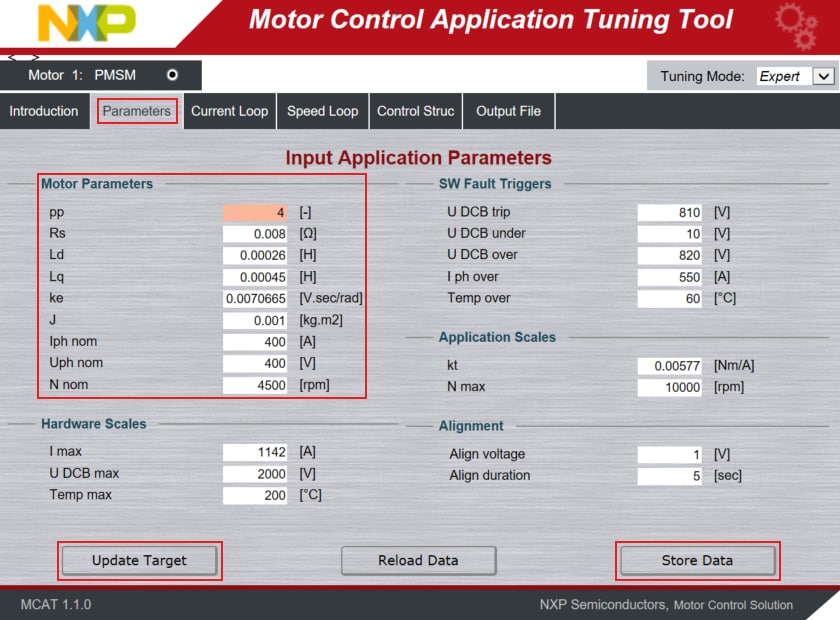
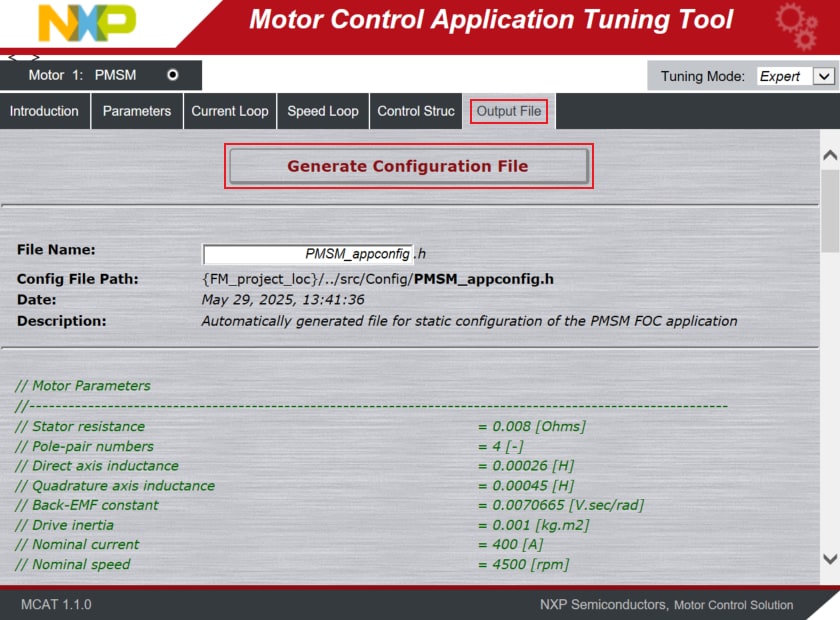
モーターのパラメータの編集が完了したら、[Store Data(データを保存)]をクリックし、[Output File(出力ファイル)]タブに切り替えて、[Generate Configuration File(設定ファイルを生成)]をクリックします。
モーターのパラメータは実行時に更新できないため、手順4.3を繰り返してプロジェクトをビルドし、コードをMCUにアップロードします。
オープン・ループでモーターを回転させる
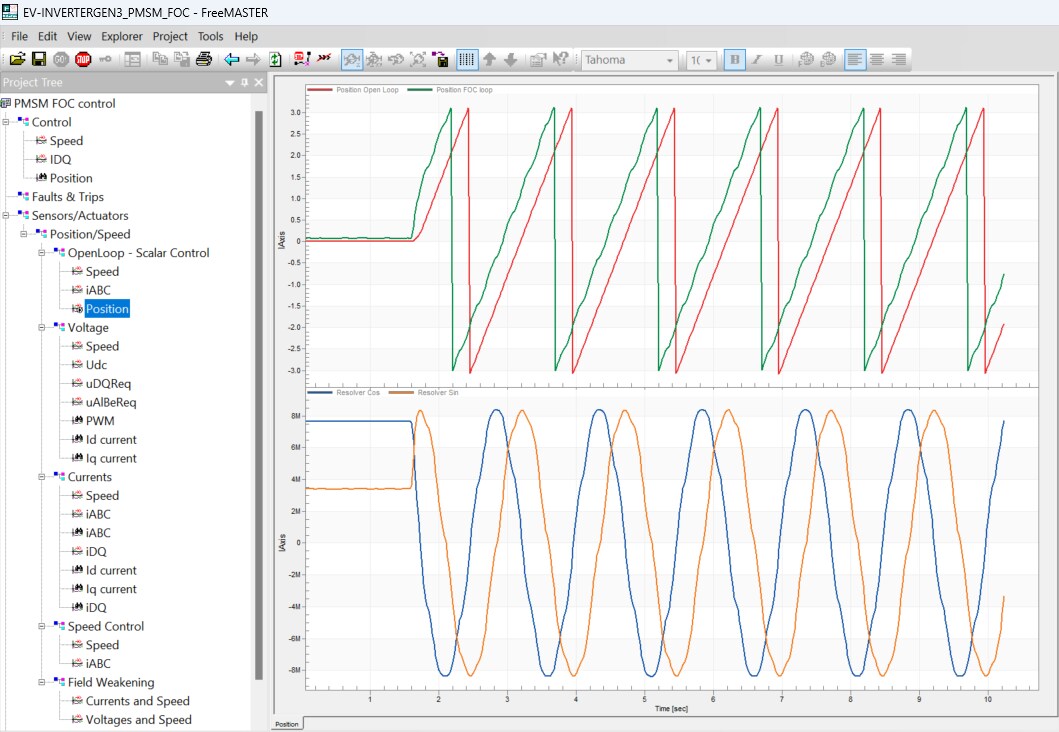
- プロジェクト・ツリーで、[
Sensors/Actuators(センサ/アクチュエータ)]→[Position/Speed(位置/速度)]→[オープンループ - スカラー制御(OpenLoop - Scalar Control)の順に選択して、[位置(Position)]ビューを選択します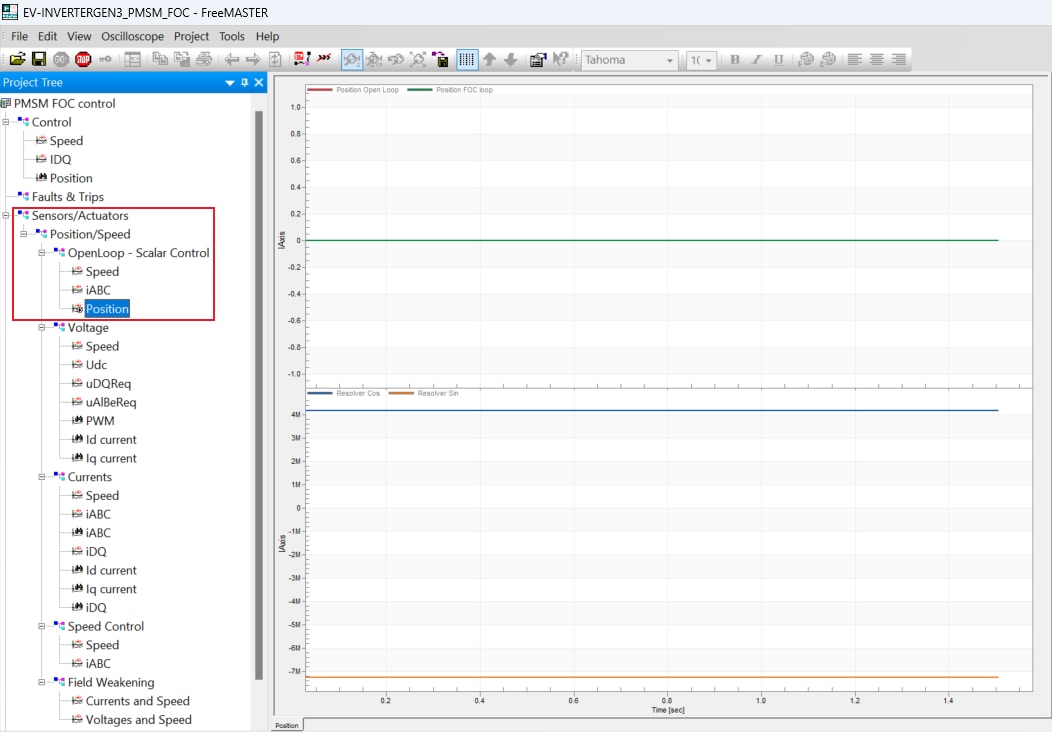
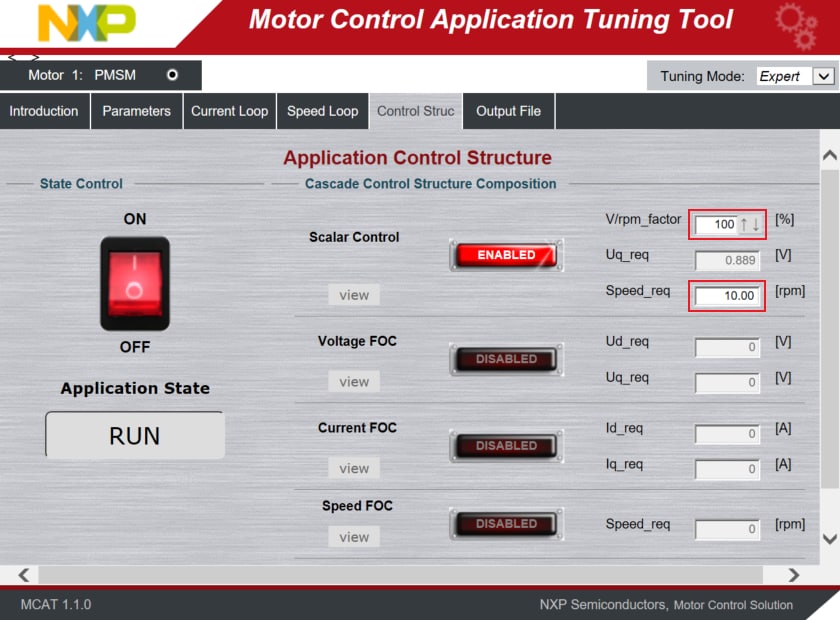
- MCATツールの[Control Struct(制御構造)]タブに切り替え、[Scalar Control(スカラ制御)]を選択します
- 必要に応じてMCATの[FAULT(障害)]ボタンをクリックして、保留中の障害をすべて消去します
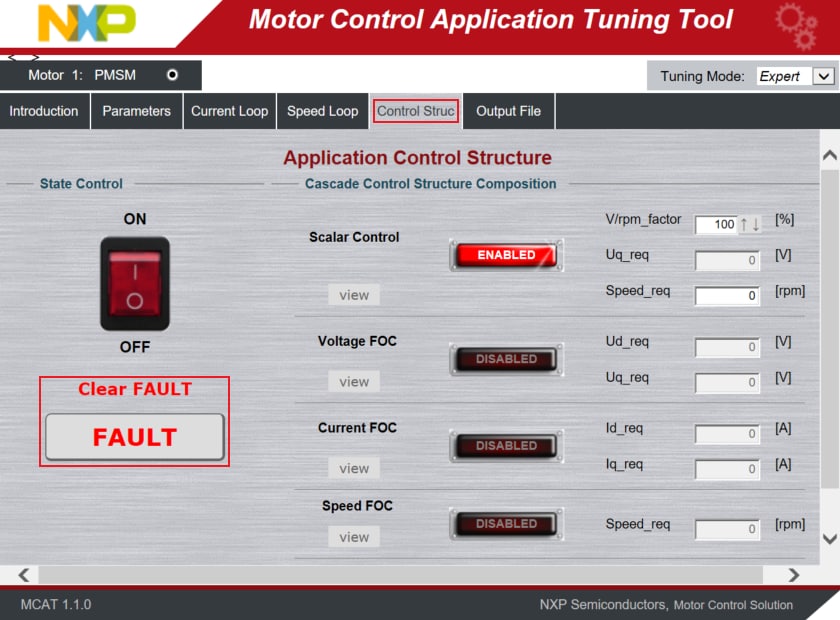
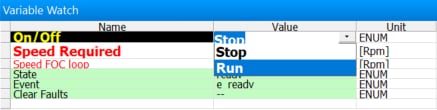
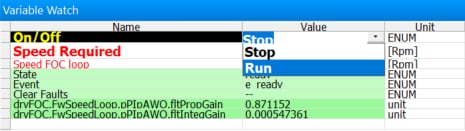
- [READY(準備完了)]状態が表示されたら、[Scalar Control(スカラー制御)]が[ENABLED(有効)]になっていることを確認し、MCATまたは[Variable Watch(変数監視)]ウィンドウで変数「On/Off」を「Run」に設定して、アプリケーションを[ON]に切り替えます
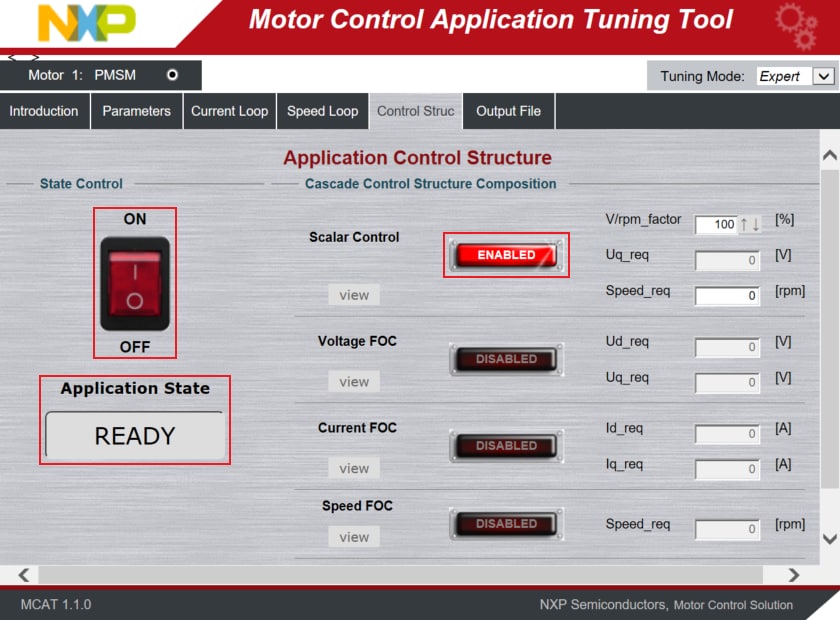
- 制御ループでフィードバックが欠落する場合に備えて、最大20 rpmでモーターの回転を開始するようにMCATでSpeed_Req値を設定します。評価には10 rpmが理想的です。必要に応じて、V/rpm_factorの値を大きくしてモーターの回転数を上げてください
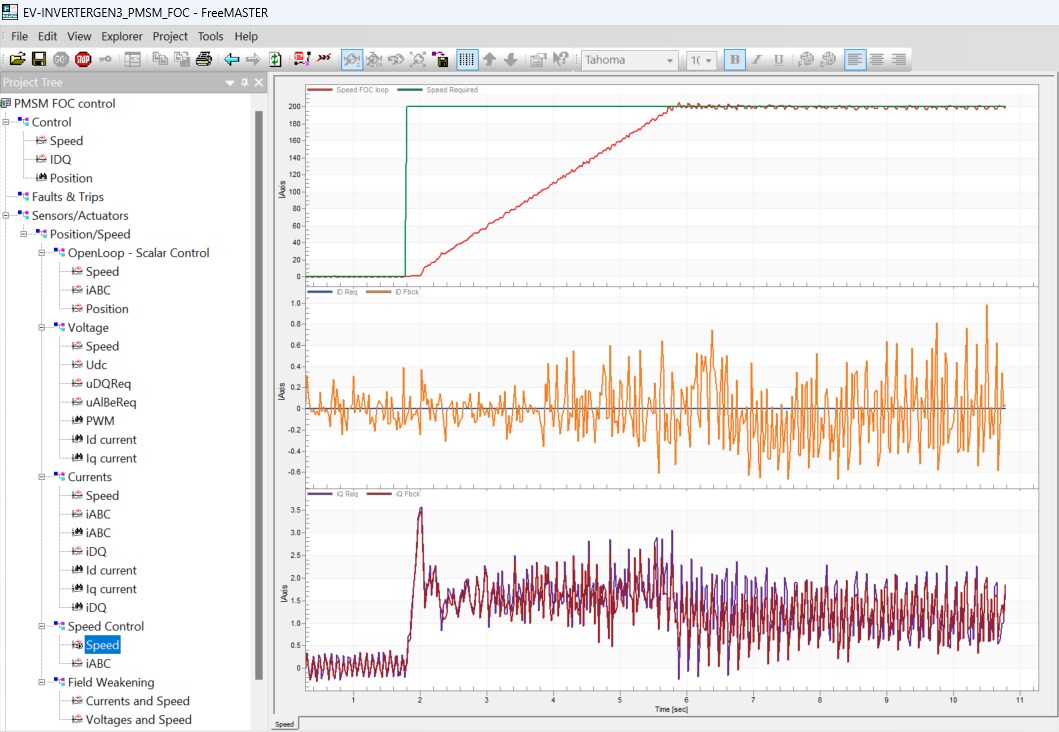
- EV-INVERTERGEN3のスカラー制御方式(オープン・ループ)を使用して、レゾルバからのフィードバック位置信号をデバッグできます。オープン・ループと、レゾルバからのモーター位置のフィードバックを確認し、比較します。位置信号の位相が反転している場合は、2つのモーターの位相配線を入れ替えて、モーターとレゾルバの回転を同期させる必要があります。回転を同期させたときの波形:
クローズド・スピード・ループ (FOC) でモーターを回転させる
- プロジェクト・ツリーで、[
Sensors/Actuators(センサ/アクチュエータ)]→[Position/Speed(位置/速度)]→[Speed Control(回転数制御)]の順に選択して、[Speed(回転数)]ビューを選択します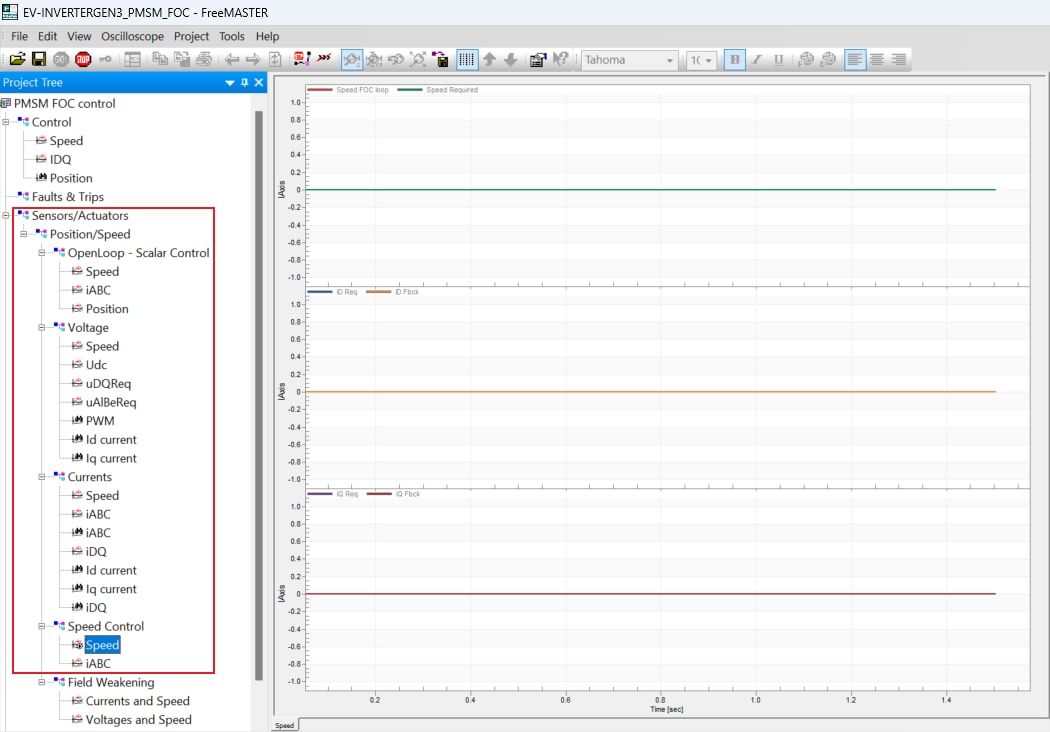
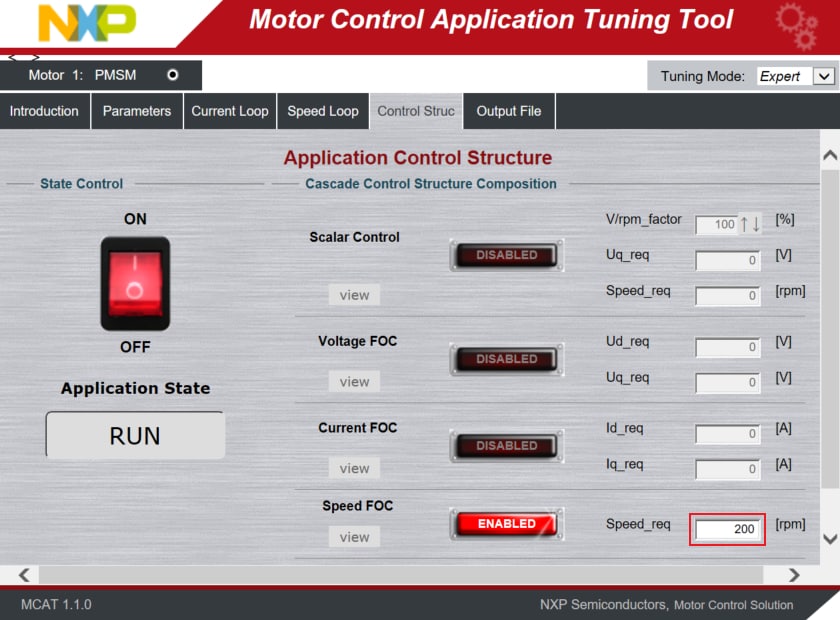
- モーター制御アプリケーション・チューニング (MCAT) ツールの[Control Struct(制御構造)]タブに切り替えます
- 必要に応じてMCATの[FAULT(障害)]ボタン([Application State(アプリケーションの状態)])をクリックして、保留中の障害をすべてクリアします
- [READY(準備完了)]状態が表示されたら、[Speed FOC(回転数FOC)]が[ENABLED(有効)]になっていることを確認し、MCATまたは[Variable Watch(変数監視)]ウィンドウで変数「On/Off」を「Run」に設定して、アプリケーションを[ON]に切り替えます
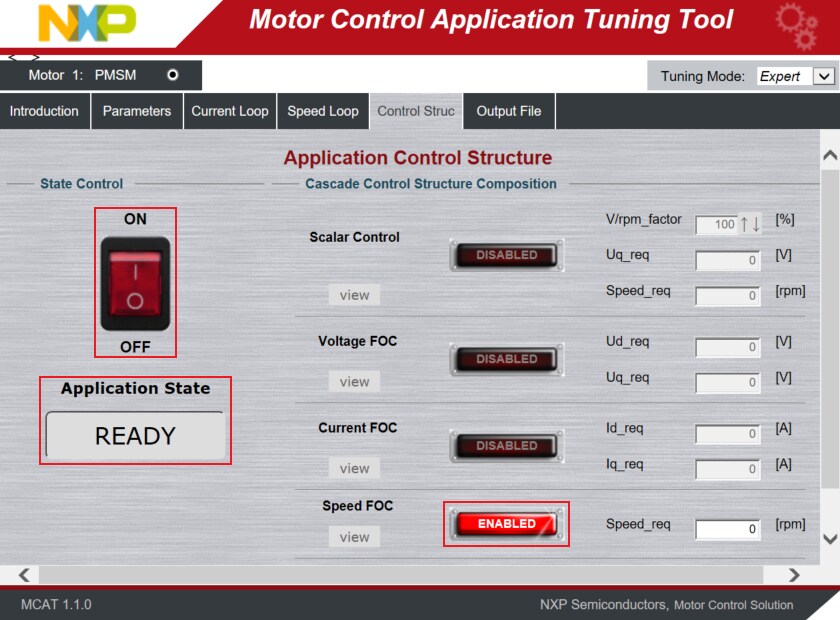
- MCATでSpeed_Req値を設定して、モーター回転を開始します
MCATを使用したモータ制御アプリケーション・チューニングの詳細については、「AN4642:三相PMSM向けモーター制御アプリケーション・チューニング (MCAT) ツール」を参照してください。
設計・リソース
ボードに関するドキュメント
アプリケーションに関するドキュメント
このページ
- 2.1
S32 Design Studioの入手
- 2.2
リアルタイム・ドライバのダウンロード
- 2.3
RTDドライバのインストール
- 2.4
GD3162ドライバのダウンロード
- 2.5
GD3162ドライバのインストール
- 2.6
FS26ドライバのダウンロード
- 2.7
FS26ドライバのインストール
- 2.8
eTPU SWのダウンロード
- 2.9
eTPU SWのインストール
- 2.10
FreeMASTER通信ドライバの入手
- 2.11
FreeMASTERアプリケーション・ツールの入手
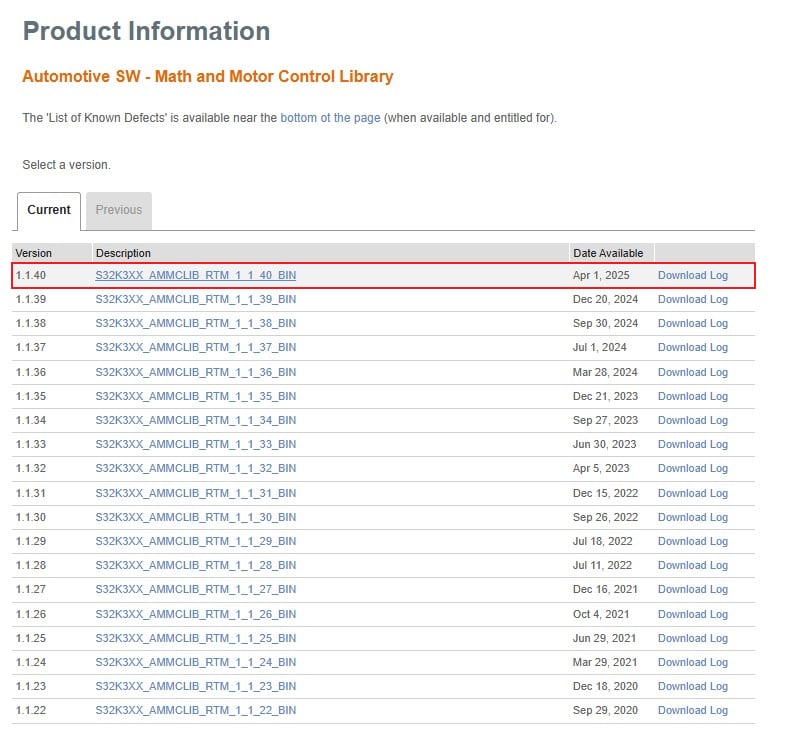
- 2.12
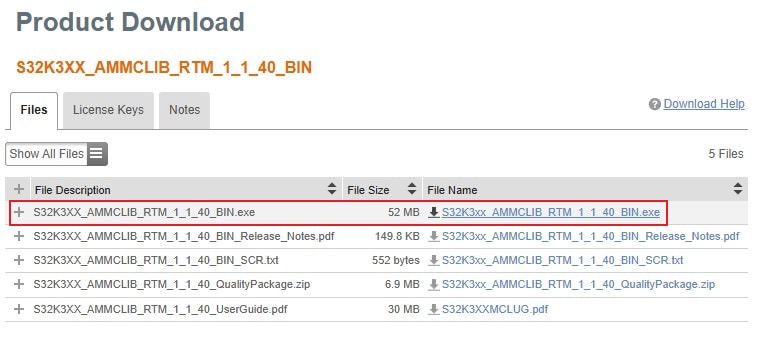
S32K3用AMMCLibの入手
- 2.13
モータ制御アプリケーション・ソフトウェアの入手
- 2.14
CANノード・ドライバの入手(オプション)