低電圧三相BLDCモータ制御向けFRDM開発プラットフォームのスタート・ガイド
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。

お客様の FRDM-MC-LVBLDC | KV1x/KV3x | モータ制御
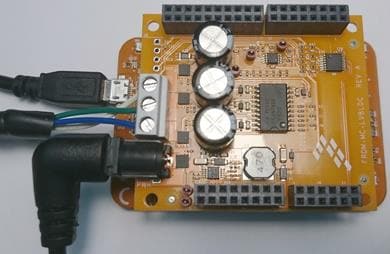
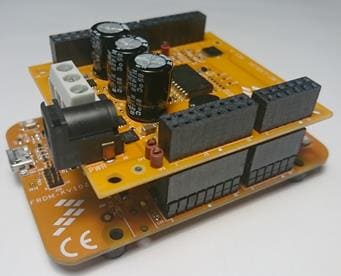
1. 接続
実際にFRDM-MC-LVBLDCを使ってみましょう!ショート・ビデオで手順を視聴するか、以下に記載された詳細な手順を参考にして、作業を進めてください。
これらの手順ではFRDMマイクロコントローラ・ボードとしてFRDM-KV10Zボードを使用しますが、FRDM-KV31Fなど、互換性のある選択肢は他にもあります。互換性のあるFRDMマイクロコントローラ・ボードの詳細については、FRDM-MC-LVBLDCの製品ページをご確認ください。


2. ソフトウェアの入手
2.2 マイクロコントローラ・ボードのプログラミング
IAR Embedded Workbench for Arm (EWARM) Ver. 7.40.2以降は、NXP®コネクティビティ・スタックを利用してソフトウェア・アプリケーションを導入するための開発ツールチェーンです。NXPでは、スムーズに開発を開始できるよう、EWARMワークスペース・プロジェクトのサンプルを用意しています。
FRDMマイクロコントローラのスタート・ガイドの指示に従って、ボード用に必要なドライバと使用可能なIDEツールチェーンをダウンロードします。次に、FRDMマイクロコントローラ・ボードとIDEツールチェーン用の対応するプロジェクトを開き、ビルドしてデバッグします。
Kinetis Design Studio IDEを使用してデモを実行する
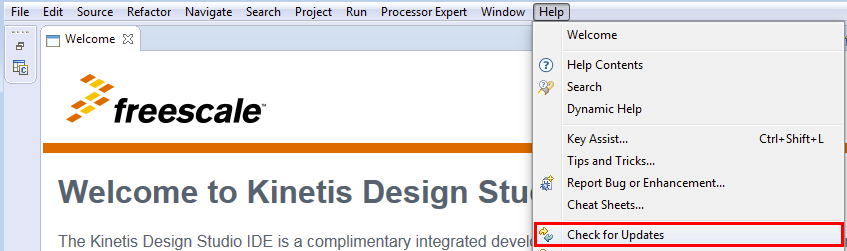
KDSアップデートのインストール
KSDKでKDS IDEを使用する前にツールが最新であるか確認することを推奨します。以下の手順はWindows版のKDSを使用して説明されていますが、MacユーザーとLinuxユーザーの場合も同じです。
- [Help(ヘルプ)]>[Check for Updates(アップデートの確認)]の順に選択します
- Freescale/NXPによるすべてのアップデートをインストールします。このようなアップデートには
com.freescale.xxxまたはcom.nxp.xxxと記載されています。ツールチェーンやデバッグ・インターフェースなどもアップデートされている場合があります。これらの追加のアップデートは通常はインストールしても問題ありませんが、KDSツールチェーンの一部としてリリースされてはいないため、場合によっては問題が発生することがあります
サンプル・アプリケーションのビルド
次の手順に従ってhello_worldアプリケーションを開きます。他のサンプル・アプリケーションでは、手順がわずかに異なる場合があります。アプリケーションによってはパスのフォルダ階層が深くなるためです。
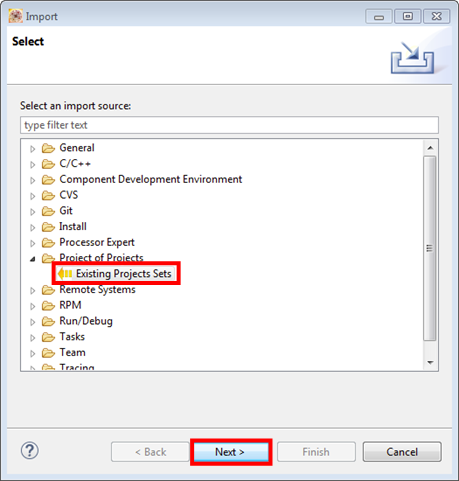
- KDS IDEメニューから、[File(ファイル)]>[Import(インポート)]の順に選択します。表示されるウィンドウで、Project of Projectsフォルダを展開し、[Existing Project Sets(既存のプロジェクト・セット)]を選択します。[Next(次へ)]ボタンをクリックします
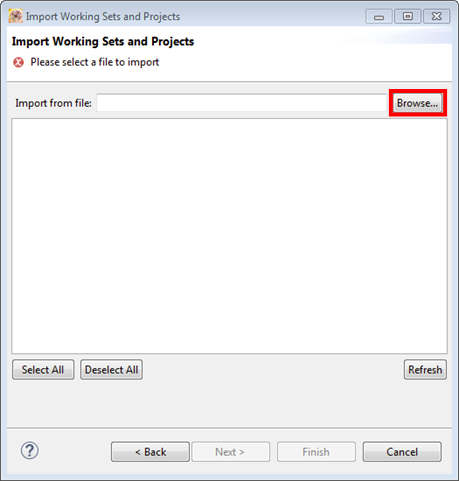
- [Import from file(次のファイルからインポート)]オプションの横にある[Browse(参照)]ボタンをクリックします
サンプル・アプリケーション・プロジェクトを指定します。このプロジェクトは次のパスで見つけることができます。
/boards/ / / /kds このガイドでは、次の特定の場所を選択します。
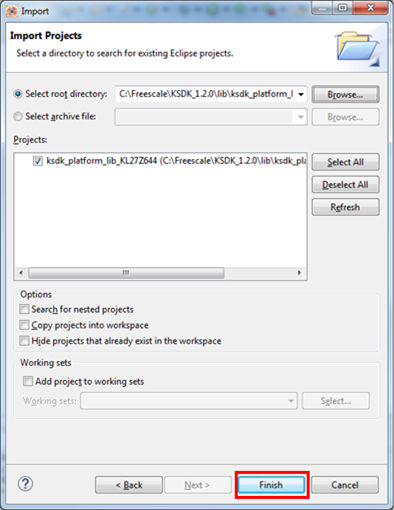
/boards/KV10Z32/demo_apps/hello_world/kds - 正しいディレクトリを指定すると、下の図のような[Import Working Sets and Projects(ワーキング・セットとプロジェクトをインポート)]ウィンドウが表示されます。[Finish(完了)]ボタンをクリックします
- 各KSDKプロジェクトに対して、以下の2つのプロジェクト設定(ビルド・ターゲット)がサポートされます。
- Debug(デバッグ):コンパイラ最適化は「低」に設定され、実行ファイルのデバッグ情報が生成されます。開発時やデバッグ時には、このターゲットを選択します
- Release(リリース):コンパイラ最適化は「高」に設定され、デバッグ情報は生成されません。最終的なアプリケーション実装時には、このターゲットを選択します
- 下の図に示すように、ハンマー・アイコンの横にある下向きの矢印をクリックして、[Debug(デバッグ)]または[Release(リリース)]のうち、適切なビルド・ターゲットを選択します。ここでは、[Debug]ターゲットを選択します。
- ビルド・ターゲットを選択すると、ライブラリのビルドが開始されます。今後、ライブラリをリビルドする際は、ハンマー・アイコンをクリックします(同じビルド・ターゲットを選択する場合)

サンプル・アプリケーションの実行
FRDM-KV10Zボードには、工場出荷時にPEmicroデバッグ・インターフェースが搭載されています。ボードのデバッグOpenSDAアプリケーションを変更している場合、OpenSDAにアクセスして、ボードを更新または工場出荷時の状態に復元する方法をご確認ください。
- 開発プラットフォームをPCに接続します。ボード上の「SDAUSB」USBポートとPCのUSBコネクタをUSBケーブルでつないでください
- PCのターミナル・アプリケーション(PuTTY、Tera Termなど)を開き、事前に確認したデバッグCOMポートに接続します。次の設定値を用いてターミナルを設定します。
- ボーレート115,200
- パリティなし
- 8データ・ビット
- 1ストップ・ビット
Linux OSユーザーの場合のみ、ターミナルで次のコマンドを実行します。これにより、システムに「libudev」がインストールされます。libudevは、KDS IDEでデバッガを起動する際に必要となります
user@ubuntu:~$ sudo apt-get install libudev-dev libudev1 user@ubuntu:~$ sudo ln -s /usr/lib/x86_64-linux-gnu/libudev.so /usr/lib/x86_64-linux-gnu/libudev.so.0- 接続するターゲットに対して、デバッガが適切に設定されているか確認します。これは、ボードのOpenSDAインターフェースを指します。ボードの内容が不明な場合は、PDFドキュメントの付録Bを参照してください。
- 利用可能なデバッガ設定を確認するには、緑色の[Debug(デバッグ)]ボタンの横にある小さな下向きの矢印をクリックして、[Debug Configurations(デバッグ構成)]を選択します
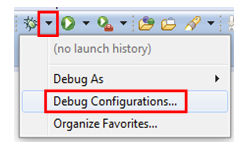
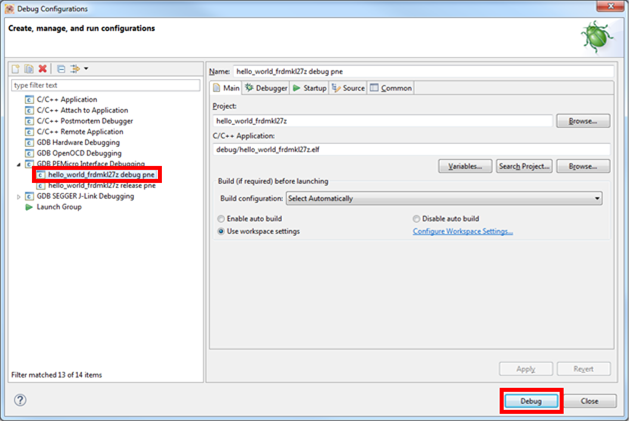
- [Debug Configurations(デバッグ構成)]ダイアログ・ボックスで、使用しているハードウェア・プラットフォームに対応するデバッグ構成を選択します。WindowsユーザーまたはLinuxユーザーの場合、[GDB PEmicro]オプションを選択します。Macユーザーの場合、[J-Link]を選択します。デバッガ・インターフェースを選択したら、[Debug(デバッグ)]ボタンをクリックしてデバッガを起動します
- 利用可能なデバッガ設定を確認するには、緑色の[Debug(デバッグ)]ボタンの横にある小さな下向きの矢印をクリックして、[Debug Configurations(デバッグ構成)]を選択します
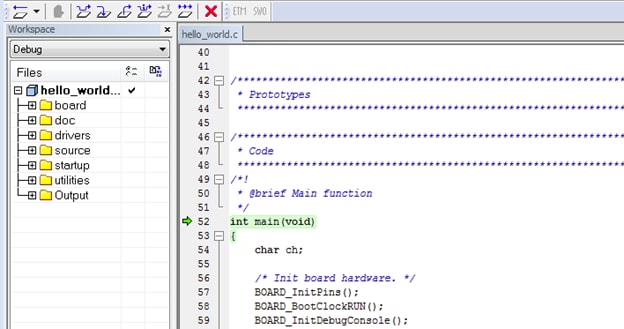
- アプリケーションがターゲットにダウンロードされると、自動的にmain()が実行されます。
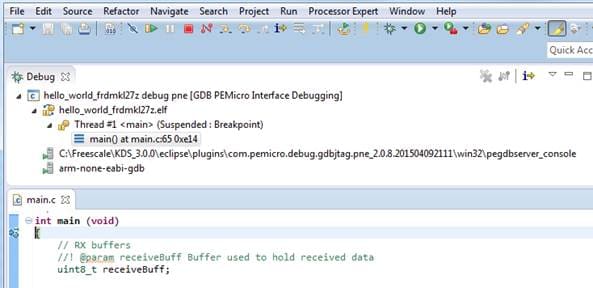
- [Resume(再開)]ボタンをクリックして、アプリケーションを起動します。
hello_worldアプリケーションが実行され、ターミナルにバナーが表示されます。表示されない場合は、ターミナルの設定と接続を確認してください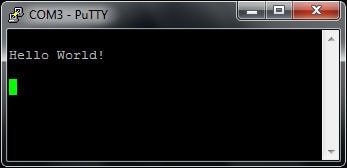
別のツールチェーンを使用する場合:
IARを使用してデモを実行する
デモ・アプリケーションのビルド
次の手順に従ってhello_worldアプリケーションを開きます。他のサンプル・アプリケーションでは、手順がわずかに異なる場合があります。アプリケーションによってはパスのフォルダ階層が深くなるためです。
目的のサンプル・アプリケーション・ワークスペースをまだ開いていない場合はここで開きます。ほとんどのサンプル・アプリケーション・ワークスペースのファイルは、次のパスに置かれています。
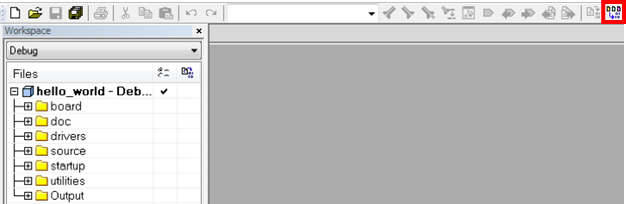
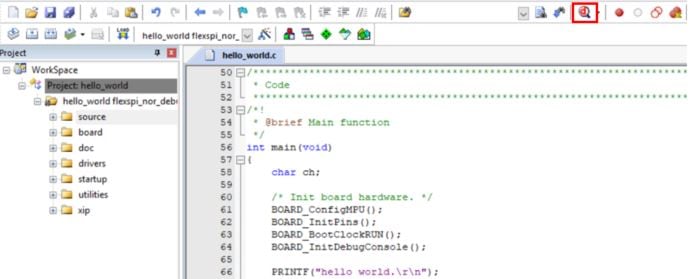
/boards/ / / /iar hello_worldデモをサンプルとして使用する場合、パスは次のようになります。/boards/frdmkv10z/demo_apps/hello_world/iar - ドロップダウン・リストから、目的のビルド・ターゲットを選択します。ここでは、「hello_world - Debug」ターゲットを選択します
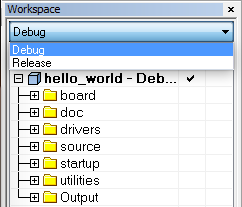
- アプリケーションをビルドするには、下の図で赤色でハイライト表示されている[Make(作成)]ボタンをクリックします
- ビルドが正常に完了します
サンプル・アプリケーションの実行
FRDM-KV10Zボードには、工場出荷時にPEmicroデバッグ・インターフェースが搭載されています。ボードのデバッグOpenSDAアプリケーションを変更している場合、OpenSDAにアクセスして、ボードを更新または工場出荷時の状態に復元する方法をご確認ください。
- 開発プラットフォームをPCに接続します。ボード上の「SDAUSB」USBポートとPCのUSBコネクタをUSBケーブルでつないでください
- PCのターミナル・アプリケーション(PuTTY、Tera Termなど)を開き、事前に確認したデバッグCOMポートに接続します。次の設定値を用いてターミナルを設定します。
- ボーレート115,200
- パリティなし
- 8データ・ビット
- 1ストップ・ビット
- [Download and Debug(ダウンロードとデバッグ)]ボタンをクリックして、アプリケーションをターゲットにダウンロードします

- アプリケーションがターゲットにダウンロードされると、自動的にmain()関数まで実行されます
- [Go(実行)]ボタンをクリックすると、コードが実行され、アプリケーションが開始されます

hello_worldアプリケーションが実行され、ターミナルにバナーが表示されます。表示されない場合は、ターミナルの設定と接続を確認してください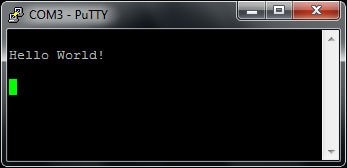
Keil® MDK/µVision®を使用してデモを実行する
CMSISデバイス・パックのインストール
MDKツールをインストールした後、デバッグ目的でデバイスを完全にサポートするには、CMSIS (Cortex® Microcontroller Software Interface Standard) デバイス・パックをインストールする必要があります。このパックには、メモリ・マップ情報、レジスタ定義、フラッシュ・プログラミング・アルゴリズムなどが含まれています。下記の手順に従って、適切なCMSISパックをインストールしてください。
- µVisionという名前のMDK IDEを開きます。IDEで[Pack Installer(パック・インストーラ)]アイコンを選択します

- [Pack Installer(パック・インストーラ)]ウィンドウで、Kinetisパックのセクションに移動します(アルファベット順に並んでいます)。Kinetisパックの名前は、「Keil::Kinetis」で始まり、マイクロコントローラ・ファミリ名が続きます(「Keil::Kinetis_KLxx_DFP」など)。ここではFRDM-KV10Zプラットフォームを使用するため、KVxxファミリのパックを選択します。パックの横にある[Install(インストール)]ボタンをクリックします。このプロセスを正常に完了するには、インターネット接続が必要となります

- インストールが完了したら、[Pack Installer(パック・インストーラ)]ウィンドウを閉じて、µVision IDEに戻ります
サンプル・アプリケーションのビルド
次の手順に従ってhello_worldアプリケーションを開きます。他のサンプル・アプリケーションでは、手順がわずかに異なる場合があります。アプリケーションによってはパスのフォルダ階層が深くなるためです。
目的のデモ・アプリケーション・ワークスペースをまだ開いていない場合は以下で開きます。
/boards/ / / /mdk ワークスペース・ファイルの名前は、
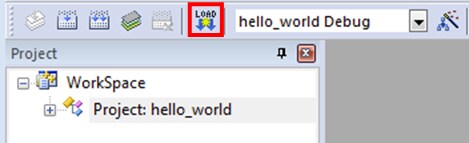
.uvmpwです。今回の例の場合、実際のパスは次のようになります。 /boards/frdmkv10z/demo_apps/hello_world/iar/hello_world.uvmpw - デモ・プロジェクトをビルドするには、赤色でハイライト表示されている[Rebuild(リビルド)]ボタンを選択します

- ビルドが正常に完了します
サンプル・アプリケーションの実行
FRDM-KV10Zボードには、工場出荷時にPEmicroデバッグ・インターフェースが搭載されています。ボードのデバッグOpenSDAアプリケーションを変更している場合、OpenSDAにアクセスして、ボードを更新または工場出荷時の状態に復元する方法をご確認ください。
- 開発プラットフォームをPCに接続します。ボード上の「SDAUSB」USBポートとPCのUSBコネクタをUSBケーブルでつないでください
- PCのターミナル・アプリケーション(PuTTY、Tera Termなど)を開き、事前に確認したデバッグCOMポートに接続します。次の設定値を用いてターミナルを設定します。
- ボーレート115,200
- パリティなし
- 8データ・ビット
- 1ストップ・ビット
- アプリケーションが正しくビルドされたら、[Download(ダウンロード)]ボタンをクリックして、アプリケーションをターゲットにダウンロードします
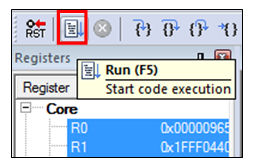
- [Download(ダウンロード)]ボタンをクリックすると、アプリケーションがターゲットにダウンロードされ、自動的に実行されます。アプリケーションをデバッグする場合、[Start/Stop Debug Session(デバッグ・セッションの開始/終了)]ボタン(赤色でハイライト表示)をクリックします
- [Run(実行)]ボタンをクリックすると、コードが実行され、アプリケーションが起動します
hello_worldアプリケーションが実行され、ターミナルにバナーが表示されます。表示されない場合は、ターミナルの設定と接続を確認してください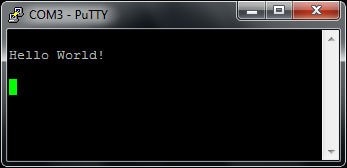
Arm® GCCを使用してデモを実行する
ツールチェーンのセットアップ
ここでは、Kinetis SDKでサポートされているように、Arm GCCツールチェーンを使用してKSDKデモ・アプリケーションのビルドと実行を行う際に必要となるコンポーネントをインストールする手順について説明します。
Arm GCCツールの使用方法はさまざまですが、今回の例では、Windows環境に焦点を当てています。ここでは省略しますが、GCCツールは、Linux OSやMac OS Xの環境でも利用できます。
GCC Arm Embeddedツールチェーンのインストール
GNU Arm Embeddedツールチェーン からインストーラをダウンロードして、実行します。これは実際のツールチェーンです(コンパイラ、リンカなど)。Kinetis SDKリリース・ノートに記載されている、サポート対象の最新バージョンのGCCツールチェーンを使用する必要があります。
MinGWのインストール
MinGW (Minimalist GNU for Windows) 開発ツールは、サード・パーティ製のCランタイムDLL(Cygwinなど)に依存しないツール・セットを提供します。KSDKで使用されているビルド環境ではMinGWビルド・ツールを利用せず、MinGWとMSYSのベース・インストールを活用しています。MSYSは、Unix系のインターフェースと各種ツールを備えた基本シェルを提供します。
- MinGW - Minimalist GNU for Windowsファイルから最新の
MinGW mingw-get-setupインストーラをダウンロードしてください - インストーラを実行します。インストール・パスとしては
C:\MinGWを推奨しますが、他のどの場所にでもインストールできます - [Basic Setup(基本セットアップ)]で、「mingw32-base」と「msys-base」が選択されていることを確認します

- [Installation(インストール)]メニューで[Apply Changes(変更を適用)]をクリックし、残りの手順に従って、インストールを完了します
Windows OSのPath環境変数に適切なアイテムを追加します。これは、[Control Panel(コントロール・パネル)]>[System and Security(システムとセキュリティ)]>[System(システム)]>[Advanced System Settings(システムの詳細設定)]の[Environment Variables...(環境変数)]セクションで設定します。パスは次のとおりです。
\bin デフォルトのインストール・パスである
C:\MinGWを使用した例を以下に示します。パスが正しく設定されていないと、ツールチェーンは機能しません
ARMGCC_DIR向けの新しい環境変数を追加する
-
新しいシステム環境変数を作成して、「ARMGCC_DIR」という名前を付けます。この変数の値で、Arm GCC Embeddedツールチェーンのインストール・パスを指定します。今回の例では、次のようになります。
C:\Program Files (x86)\GNU Tools Arm Embedded\4.9 2015q3インストール・フォルダの正確なパス名については、GNU Arm GCC Embeddedツールのインストール・フォルダを参照してください

CMakeのインストール
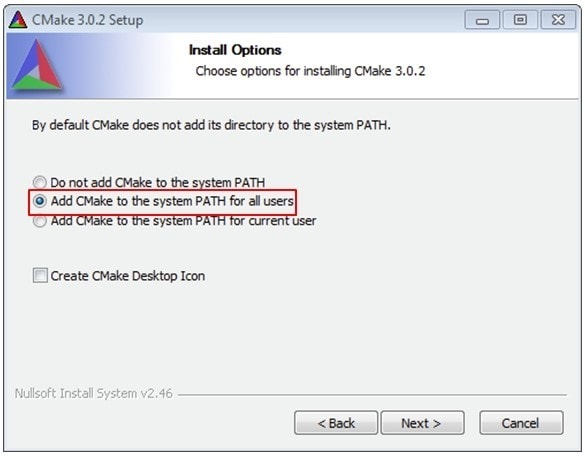
- CMakeからCMake 3.0.xをダウンロードします
- CMakeをインストールします。インストール時には、必ず[Add CMake to system PATH(CMakeをシステムPATHに追加)]オプションを選択します。すべてのユーザーが使用できるパスにインストールするか、現在のユーザーのみが使用できるパスにインストールするかは、ユーザーが選択します。今回の例では、すべてのユーザーに対してインストールしています
- インストーラの残りの手順に従います
- PATHの変更を適用するには、システムの再起動が必要になる場合があります
サンプル・アプリケーションのビルド
サンプル・アプリケーションをビルドする手順は次のとおりです。
- GCC Arm Embeddedツールチェーンのコマンド・ウィンドウが開いていない場合はここで開きます。ウィンドウを開くには、Windows OSの[スタート]メニューから、[プログラム]>[GNU Tools Arm Embedded
]に移動して、[GCC Command Prompt(GCCコマンド・プロンプト)]を選択します 
サンプル・アプリケーションのプロジェクト・ディレクトリに移動します。パスは次のようになります。
/boards/ / / /armgcc このガイドの場合、実際のパスは次のようになります。
/boards/frdmkv10z/demo_apps/hello_world/armgcc - コマンドラインで「build_debug.bat」と入力するか、Windows OSのエクスプローラで「build_debug.bat」ファイルをダブルクリックして、ビルドを実行します。次のような出力画面が表示されます。

サンプル・アプリケーションの実行
GCCツールを使用するには、J-Linkデバッグ・インターフェースが必要となります。ボードのOpenSDAファームウェアを最新のJ-Linkアプリケーションにアップデートするには、OpenSDAにアクセスしてください。J-Link OpenSDAアプリケーションをインストールしたら、「SEGGER Downloads」からJ-Linkドライバとソフトウェア・パッケージをダウンロードします。
- 開発プラットフォームをPCに接続します。ボード上の「SDAUSB」USBポートとPCのUSBコネクタをUSBケーブルでつないでください
- PCのターミナル・アプリケーション(PuTTY、Tera Termなど)を開き、事前に確認したデバッグCOMポートに接続します。次の設定値を用いてターミナルを設定します。
- ボーレート115,200
- パリティなし
- 8データ・ビット
- 1ストップ・ビット
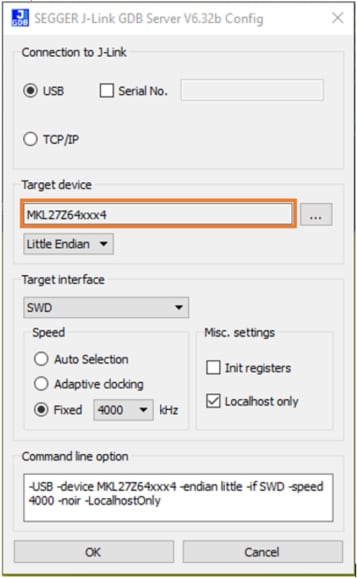
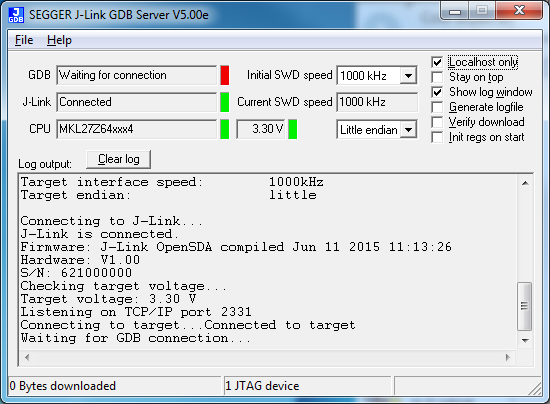
- J-Link GDBサーバ・アプリケーションを開きます。J-Linkソフトウェアがインストールされている場合、Windows OSの[スタート]メニューに移動し、[プログラム]>[SEGGER]>[J-Link
J-Link GDB Server]を選択するとアプリケーションを起動できます - 次のように設定を変更します。今回の例で選択されているターゲット・デバイスは、「MKV10Z32xxx7」です

- 接続すると、画面は次の図のようになります。
- GCC Arm Embeddedツールチェーンのコマンド・ウィンドウが開いていない場合はここで開きます。ウィンドウを開くには、Windows OSの[スタート]メニューから、[プログラム]>[GNU Tools Arm Embedded
]に移動して、[GCC Command Prompt(GCCコマンド・プロンプト)]を選択します 
サンプル・アプリケーションの出力を格納するディレクトリに移動します。出力は、選択したビルド・ターゲットに応じて、次のいずれかのパスに格納されます。
/ / /armgcc/debug / / /armgcc/release このガイドの場合、パスは次のようになります。
/boards/frdmkv10z/demo_apps/hello_world/armgcc/debug - 「arm-none-eabi-gdb.exe
.elf」というコマンドを実行します。この例の場合、「arm-none-eabi-gdb.exe hello_world.elf」というコマンドになります 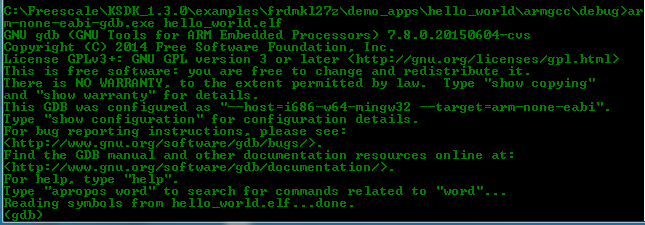
- 次のコマンドを実行します。
- target remote localhost:2331
- monitor reset
- monitor halt
- load
- monitor reset
- アプリケーションがダウンロードされ、リセット・ベクタで停止します。「monitor go」コマンドを実行すると、サンプル・アプリケーションが開始されます
hello_worldアプリケーションが実行され、ターミナル・ウィンドウにバナーが表示されます
3. ビルドと実行
3.1 FRDMコントローラ・ボードの電源を入れる
FRDM-MC-LVBLDCボードの電源バレル・コネクタに12 V/5 A電源を接続します。