MCSPTE1AK116スタート・ガイド
このドキュメントの内容
-
パッケージの内容
-
ソフトウェアの入手
-
接続
-
ビルド
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
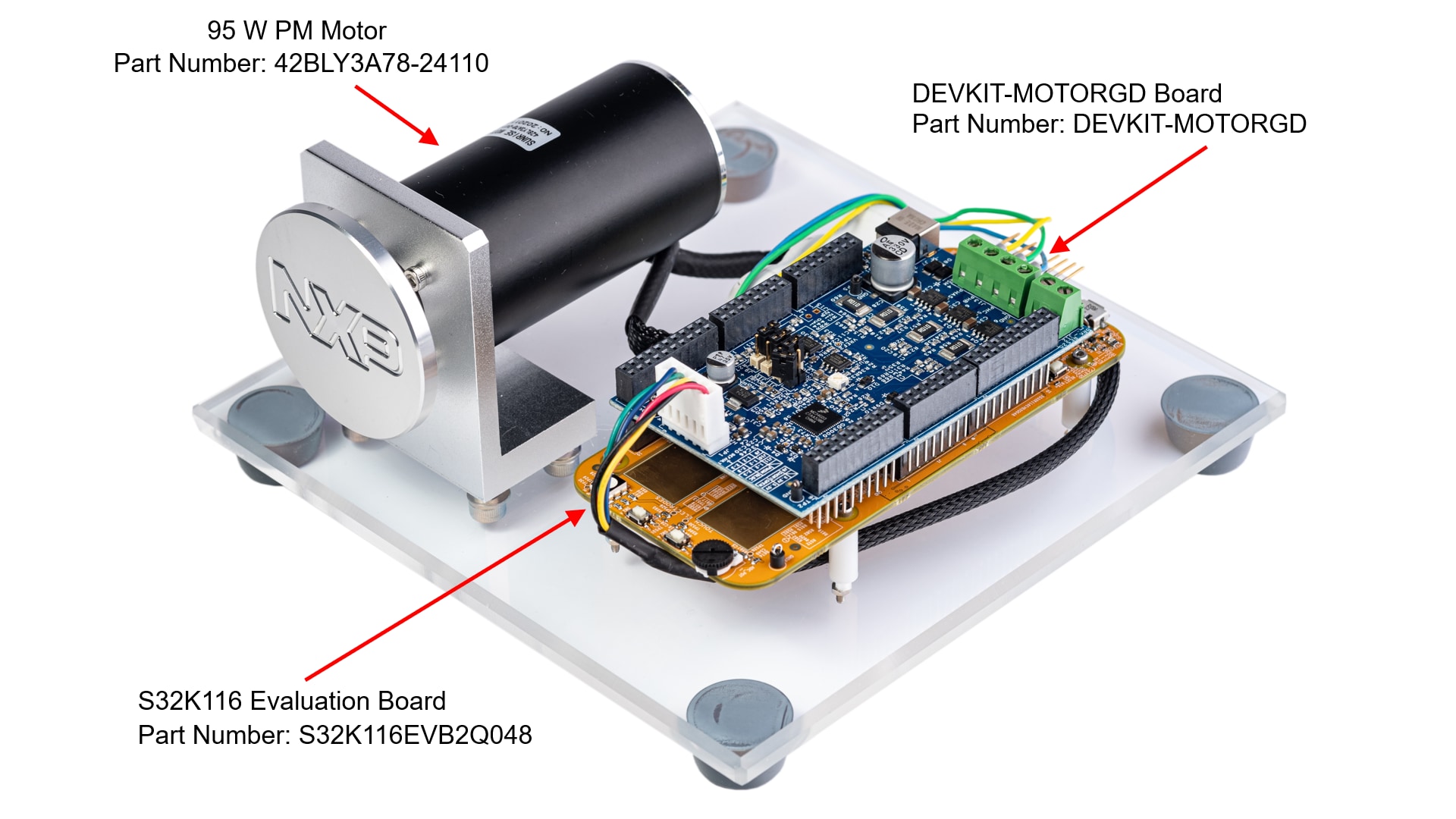
お客様の S32K116 BLDC/PMSM Development Kit
パッケージの内容
1.1 開発キットについて
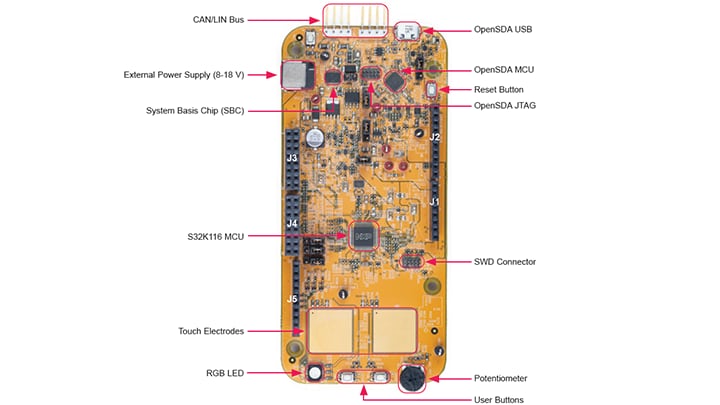
1.2 S32K116EVB評価ボードについて
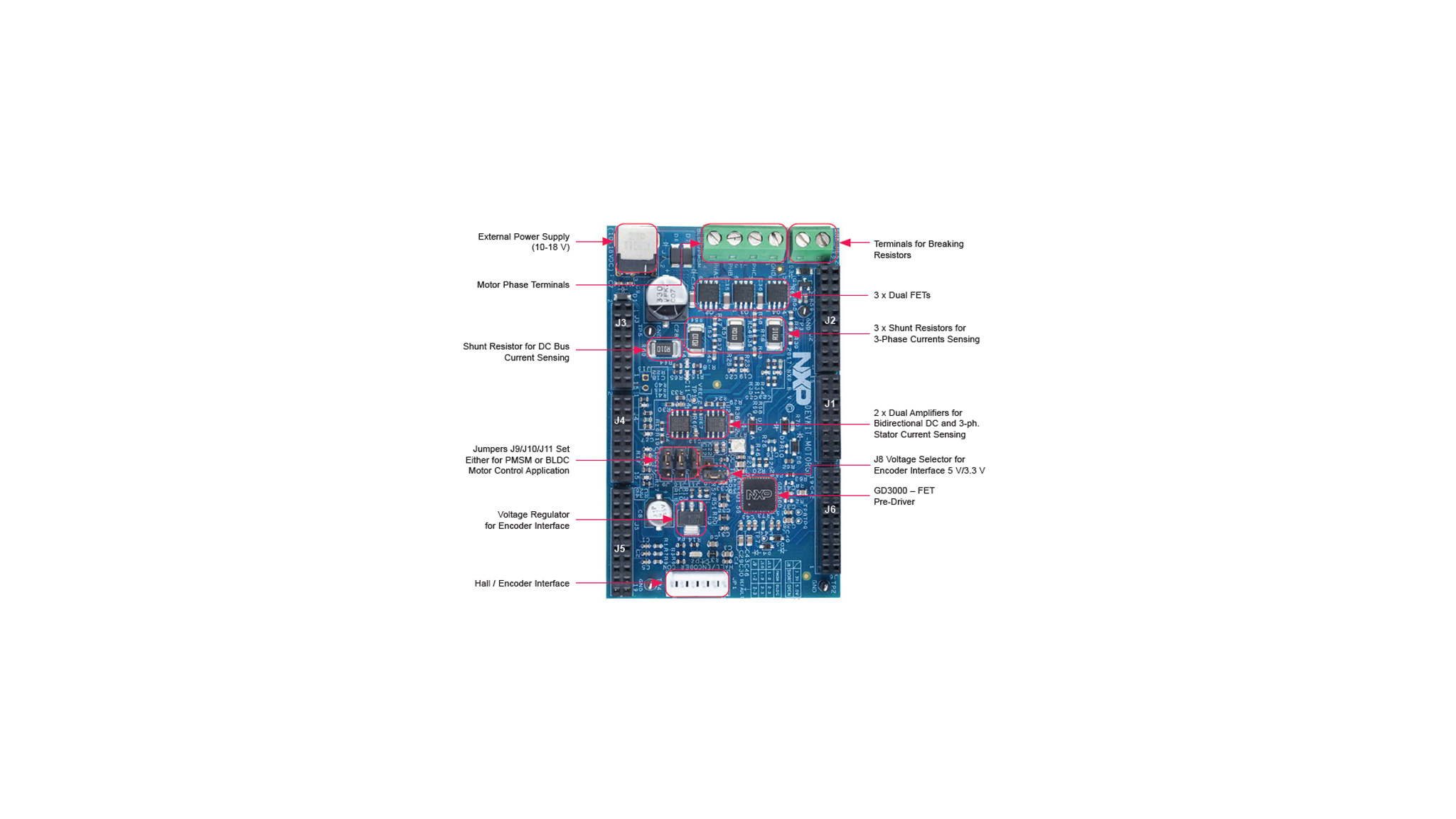
1.3 DEVKIT-MOTORGDについて
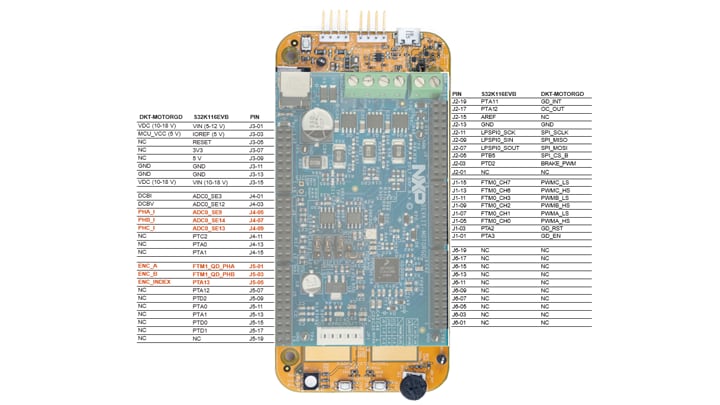
1.4 PMSMモータ制御用のヘッダ/ピン配置
S32K116EVBは、I/Oヘッダの内側のピンを通してDEVKIT-MOTORGDを制御します。
I/Oヘッダの内側のピンはArduino互換です。赤色のピンは設定可能です
PMSMモータ制御用のピン設定を次に示します。
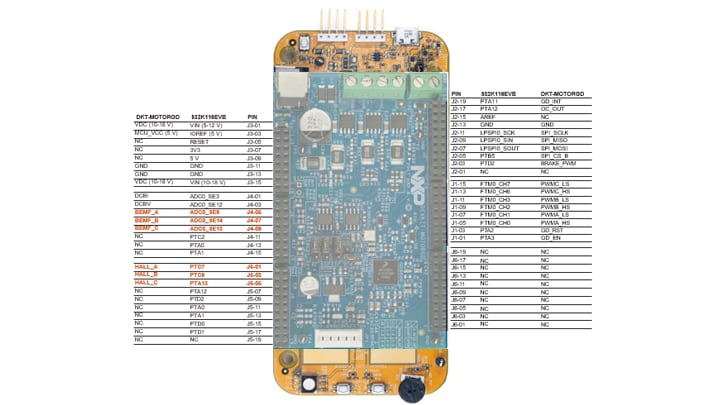
1.5 BLDCモータ制御用のヘッダ/ピン配置
S32K116EVBは、I/Oヘッダの内側のピンを通してDEVKIT-MOTORGDを制御します。
I/Oヘッダの内側のピンはArduino互換です。赤色のピンは設定可能です
BLDCモータ制御用のピン設定を次に示します。
ソフトウェアの入手
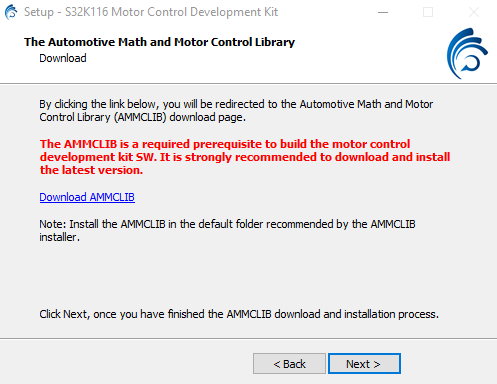
2.1 開発キットのダウンロード – アプリケーション・ソフトウェア
このソフトウェア・パッケージには、ほとんどの一般的なハードウェア構成向けのプロジェクトが含まれています。
MCSPTE1AK116アプリケーション・ソフトウェアのダウンロード

:インストール時に、車載用演算/モータ制御ライブラリ・セットの最新版をダウンロードするよう求められます。
2.2 統合開発環境 (IDE) の入手
MCSPTE1AK116は、S32 Design Studio IDE for Arm®を使用するとパフォーマンスが向上します
:S32 Design Studioのページで最新バージョンをご確認ください。
2.3 ランタイム・デバッグ・ツールの入手
MCSPTE1AK116評価ボードは、FreeMASTERツールを使用してランタイム・デバッグを行うとパフォーマンスが向上します。
:FreeMASTERのページで最新バージョンをご確認ください。
接続
ビデオをご覧いただくか、以下のステップ・バイ・ステップ・ガイドに従ってMCSPTE1AK116を設定してください。
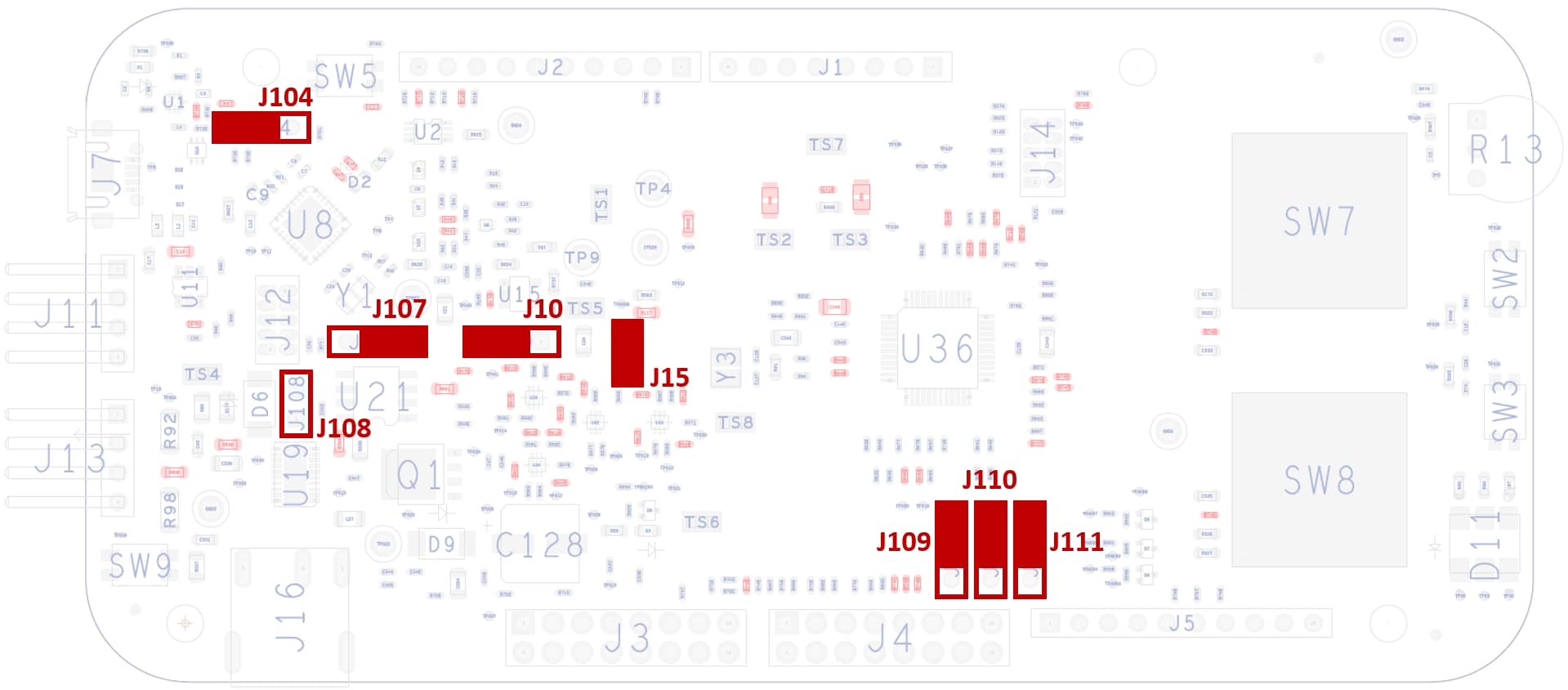
3.1 S32K116EVB評価ボードのジャンパの設定
| ジャンパ | 設定 | オプション | 説明 |
|---|---|---|---|
J10 |
2-1 | MCU電圧 | MCUに3.3 Vから給電 |
| 2-3 | MCUに5 Vから給電(デフォルト) | ||
J15 |
オープン | MCU電流 | 外部電流計での電流計測用ピン |
| ショート | 計測 | 電流計測用ピンをショート(デフォルト) | |
J104 |
2-1 | リセット信号 | リセット信号をMCUに送信し、S32K116のリセットに使用(デフォルト) |
| 3-3 | リセット信号をOpenSDAに送信し、Open SDAのブートローダ・モードに入るために使用 | ||
J107 |
2-1 | ボード入力電源 | EVBに12 V電源から給電(デフォルト) |
| 3-3 | EVBにUSB microコネクタから給電 | ||
J108 |
オープン | LINモード | LIN Responder*モード(デフォルト) |
| ショート | LIN Commander**モード | ||
J109 / J110 / J111 |
2-1 | モータ/RGB LED | 信号PTD15、PTD16、およびPTE8をPWMモータ制御用にルーティング(デフォルト) |
| 3-3 | ルーティング | 信号PTD15、PTD16、およびPTE8をRGB LED用にルーティング |
3.2 DEVKIT-MOTORGD評価ボードのジャンパの設定
| ジャンパ | 設定 | オプション | 説明 |
|---|---|---|---|
J8 |
ショート | ホール/エンコーダ・インターフェース | ホール/エンコーダ・インターフェースの電圧レベルが3.3V |
| オープン | ホール/エンコーダ・インターフェースの電圧レベルが5.0V(デフォルト) | ||
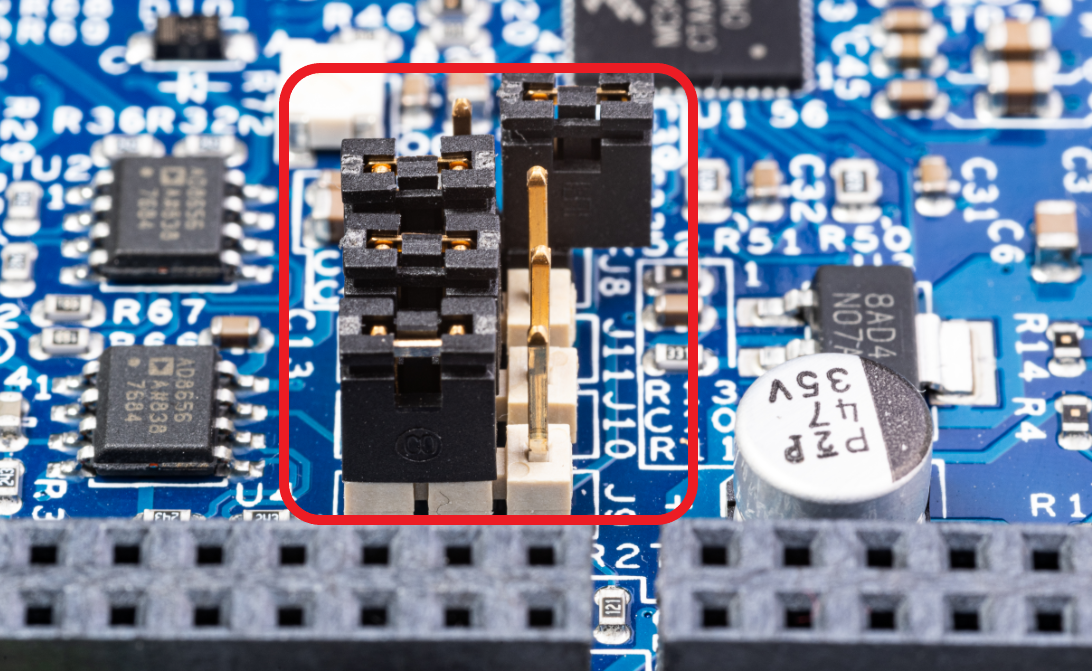
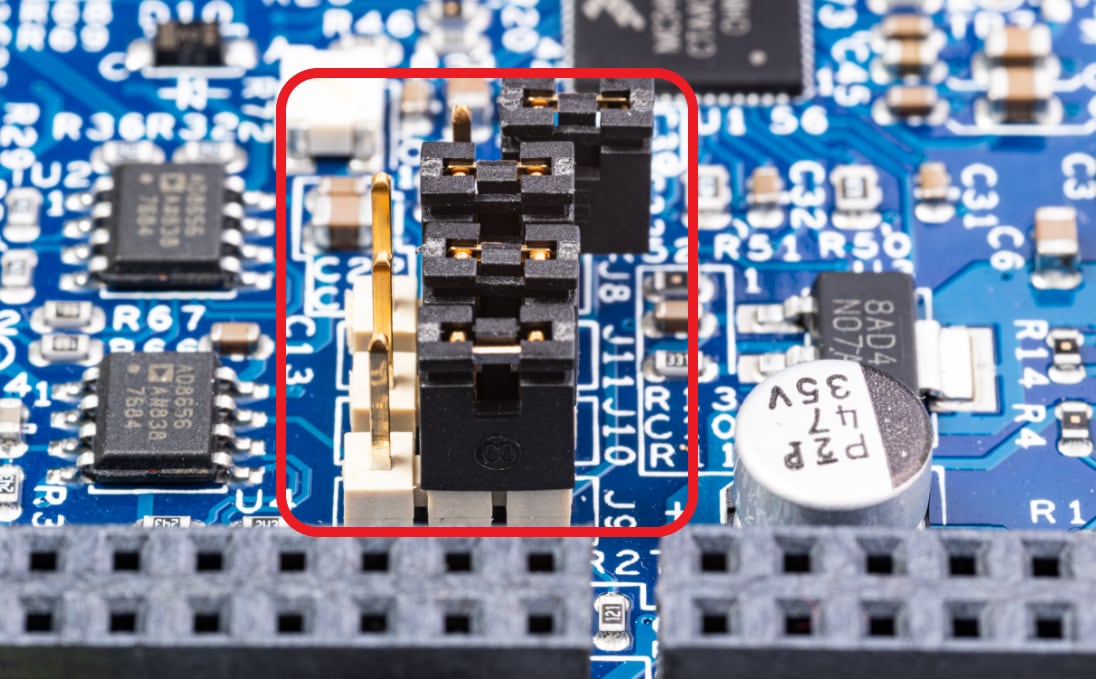
J9 / J10 / J11 |
1-2 | モータの種類 | PMSM FOC(正弦波)モータ制御用の双方向3相電流検知 |
| 2-3 | BLDC 6ステップ(台形)センサレス・モータ制御用の3相逆起電力電圧検知 |
3.3 S32K1116EVBおよびDEVKIT-MOTORGDボードの設定
S32K116EVBおよびDEVKIT-MOTORGDのジャンパ・オプションがデフォルト設定になっていることを確認します。
S32K116EVBおよびDEVKIT-MOTORGDのジャンパJ107が、ボードに12 V電源から給電するための位置1-2になっていることを確認します。
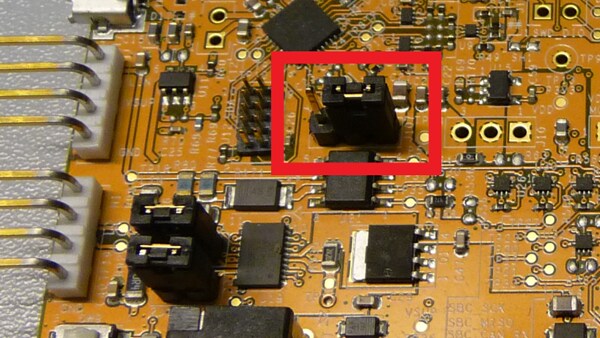
DEVKIT-MOTORGDのジャンパJ9、J10、およびJ11を、PMSMアプリケーションの場合は1-2、BLDCアプリケーションの場合は2-3の位置に配置します。ジャンパJ8は、5Vホール・センサ用にオープンのままにします。
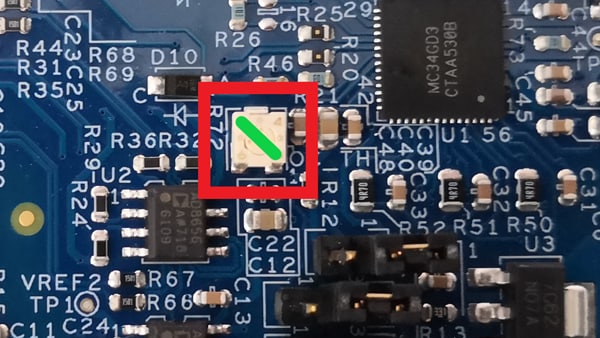
過電流コンパレータ用のポテンショメータが約8~10 Aの位置(中央からわずかに左)に設定されていることを確認します。
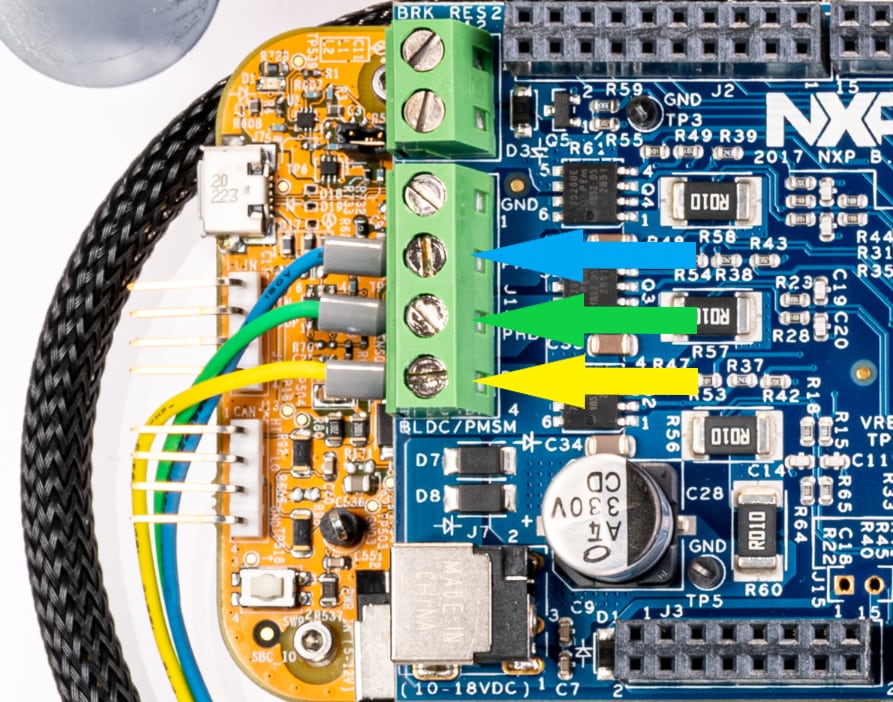
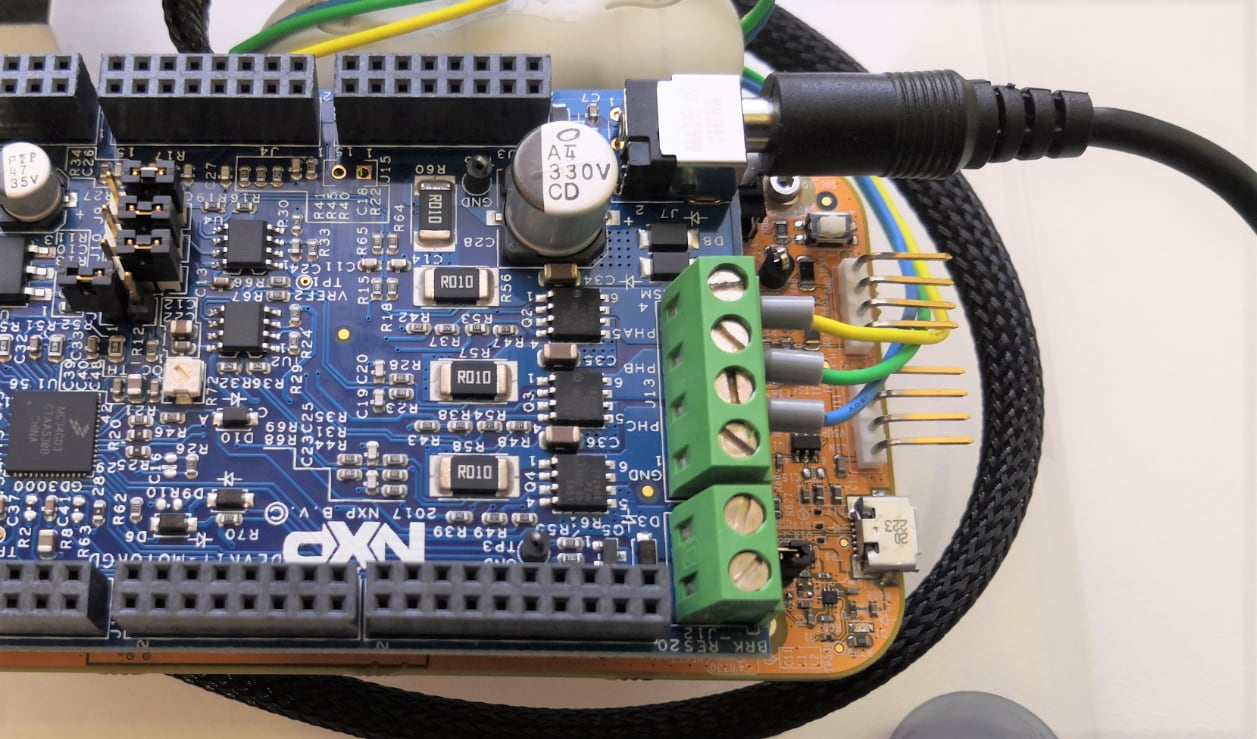
3.4 モータの接続
モータの相配線が、A相からC相の順に次のように配線されていることを確認します。
- A:黄色
- B:緑色
- C:青色
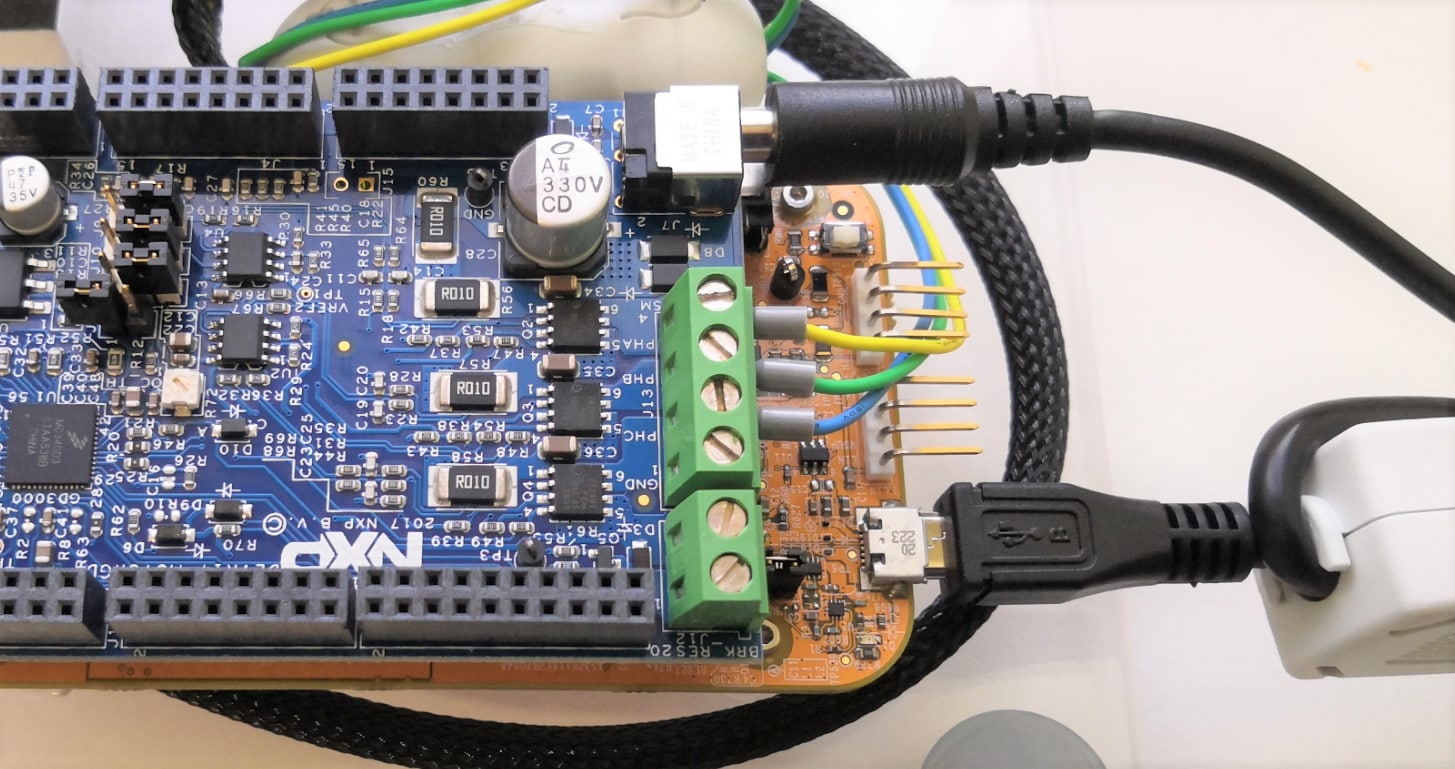
3.5 電源の接続
3.6 USBケーブルの接続
USBケーブルを使用してS32K116ボードをPCに接続します。
:必要に応じて、PCで自動的にUSBドライバを設定します。
ビルド
4.1 アプリケーションの選択とMCUプログラミング
インストールしたディレクトリ (NXP\MCSPTE1AK116\sw) から適切なPMSMまたはBLDCモータ制御アプリケーションを選択します。
S32 Design Studioを使用してMCUをプログラミングします。
インストールされているアプリケーション・ソフトウェア・プロジェクトをS32 Design Studio IDE for Arm®にインポートするには、次の手順に従います。
- S32DS for Armを起動します。
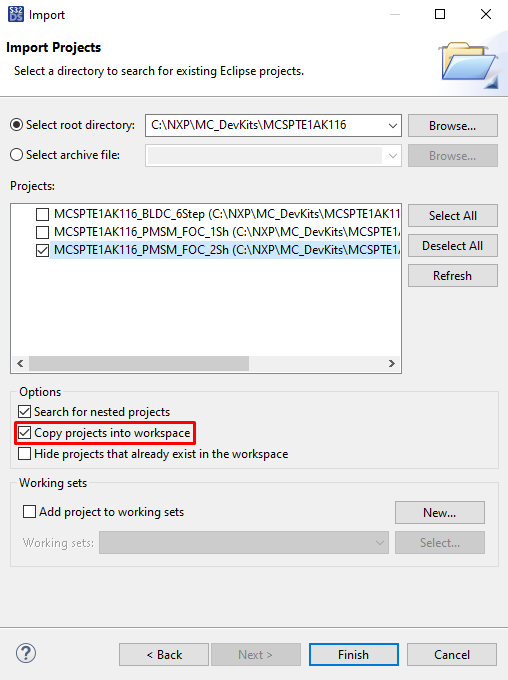
- [File(ファイル)]>[Import(インポート)]に移動し、[General(全般)]>[Existing Projects into Workspace(既存プロジェクトをワークスペースへ)]を選択します。
- インストールされているアプリケーションのディレクトリ(.. MC_DevKits\MCSPTE1AK116\swフォルダ)に移動し、適切なプロジェクトを選択して、[OK]をクリックします。次に、[Finish(完了)]をクリックします。
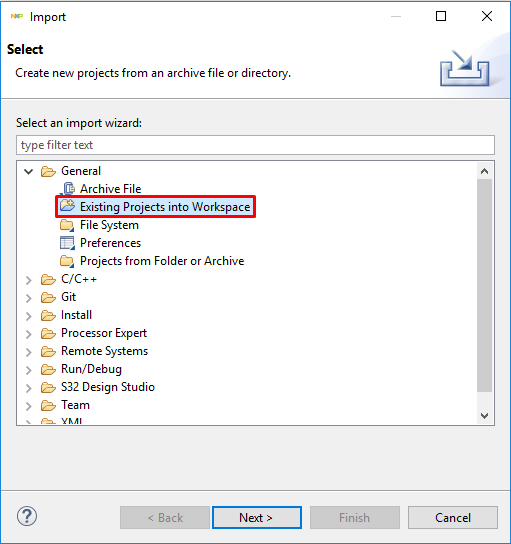
:[Copy projects into workspace(プロジェクトをワークスペースにコピー)]オプションのチェックボックスをオンにします。
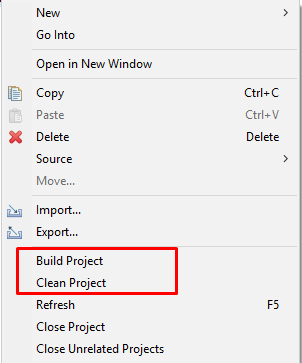
オプション:以下の手順は続いて自動的に実行されるため、ここでは必要ありません。
- インポートされたプロジェクトを右クリックして[Clean(消去)]を選択
- インポートされたプロジェクトを右クリックして[Build(ビルド)]を選択
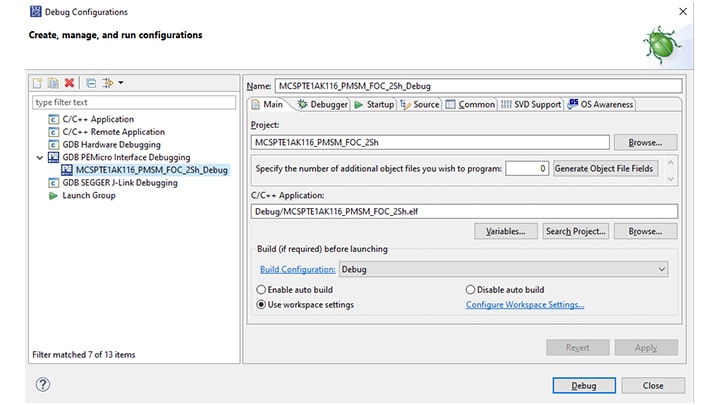
4.2 デバッグとロード
S32 Design Studioのメニューで[Run(実行)]>[Debug Configuration(デバッグ設定)]をクリックし、定義済みのデバッグ設定を選択して[Debug(デバッグ)]をクリックすると、ビルド済みコードのMCUへのロードが開始されます。
4.3 コードの実行
コードを実行するには、[Resume(再開)]をクリックするかF8キーを押し、[Disconnect(切断)]を使用して、S32DS IDEデバッガとFreeMASTERツールの間の干渉を回避します。


4.4 デバッグ・ツールの設定
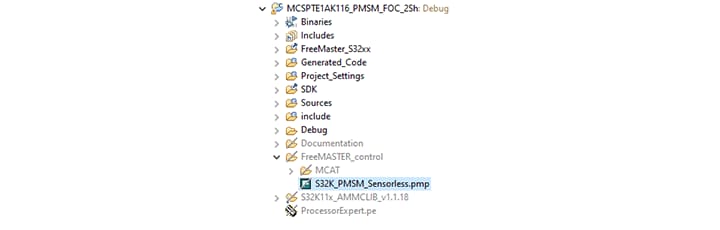
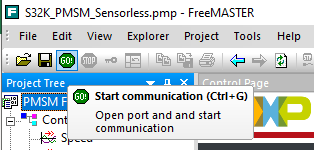
FreeMASTERアプリケーションを起動します。
[File(ファイル)]>[Open Project(プロジェクトを開く)]の順にクリックして、*.pmp FreeMASTERプロジェクト
:S32DSプロジェクト・フォルダ内で直接ダブルクリックして起動することもできます。
通信を有効にするには、FreeMASTERツールバーで[Go]をクリックします(またはCtrl+Gを押します)。
通信が成功すると、下部のステータス・バーに次のように表示されます。
RS232 UART Communication;COMn;speed = 38400
アプリケーション制御
モータ・ドライブの設定
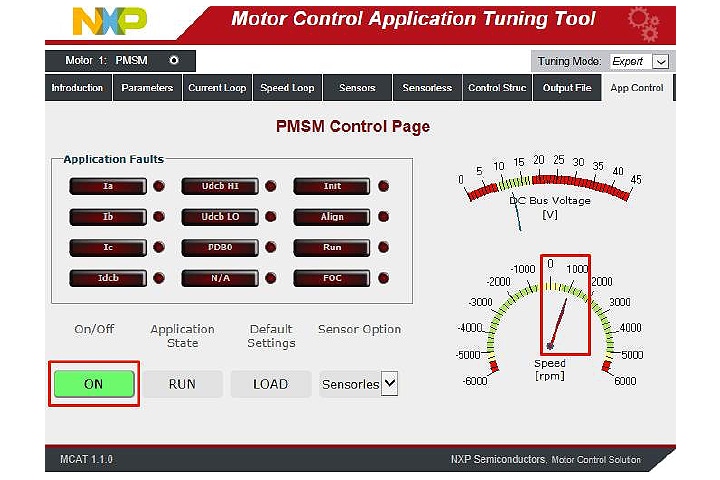
モータ制御アプリケーション・チューニング (MCAT) ツールのメニューで[App Control(アプリケーション制御)]タブをクリックして、アプリケーション制御ページを表示します。
モータのrpmを設定し、モータ・ドライブをオンにします。
DEVKIT-MOTOGDボードに電源を接続すると、アプリケーションがREADY状態になります。
保留中の障害の確認
保留中の障害がある場合は、FreeMASTER MCATの制御ページで[Clear FAULT(障害をクリア)]をクリックするか、またはボードのSW2とSW3を同時に押し続けます。
アプリケーションの起動
制御ページで[ON/OFF]をクリックするか、ボードのSW2/SW3を押して、ロータの時計回り/反時計回りの回転を開始します。
速度の設定
速度を設定するために必要な変数を変更します。
速度ゲージをクリックするか、スイッチSW2/SW3を押して、変数監視ウィンドウに移動します。
アプリケーションの停止
FreeMASTER MCATの制御ページで[ON/OFF]ボタンをクリックするか、S32K116EVBボードのSW2とSW3を同時に押し続けて、アプリケーションを停止します。
設計・リソース
チップに関するドキュメント
- S32K1xx MCUファミリ – データ・シート
- S32K1xx MCUファミリ – リファレンス・マニュアル
- S32K1xx MCUファミリ – 機能安全ドキュメント(SafeAssure NDAグループへのアクセスが必要)
サポート
トレーニング
- スケーラブルでセキュアなMCUによるモータ制御アプリケーションのアップグレード(S32K1モータ制御ソリューション)
- Simulink®からNXP S32Kへのモータ制御アルゴリズムの導入
- 柔軟で信頼性の高いNXPソリューションでモータ制御アプリケーションを合理化
フォーラム
NXPのいずれかのコミュニティ・サイトで、他のエンジニアとつながり、MCSPTE1AK116を使用した設計に関する専門的なアドバイスを受けることができます。