DEVKIT-MOTORGDのスタート・ガイド
このドキュメントの内容
-
セットアップ
-
ソフトウェアの入手
-
ベース・ボードをプログラムする
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。
お客様の Motor Control Shield for DEVKIT
1. セットアップ
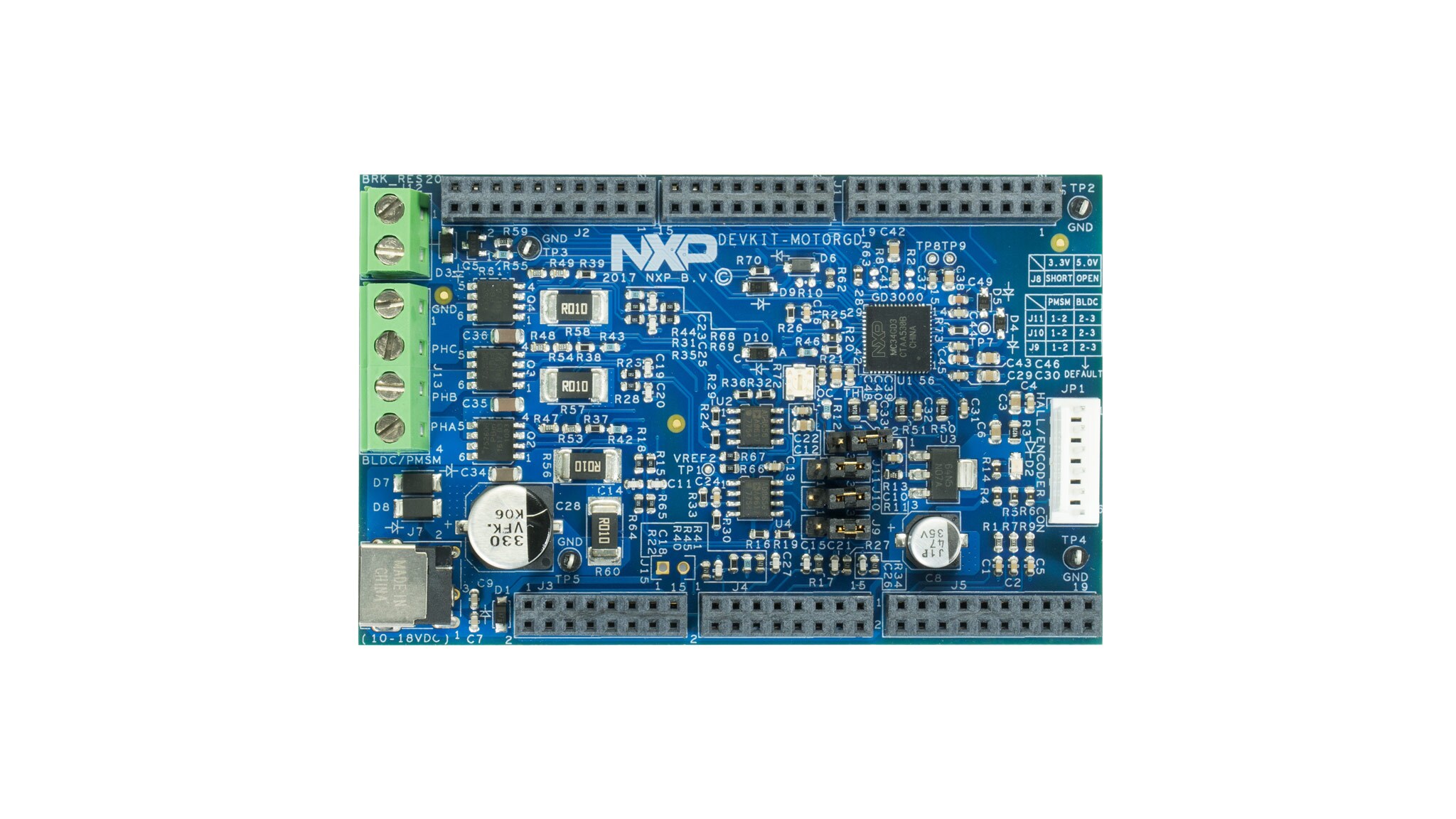
1.1 DEVKIT-MOTORGDモータ制御シールドのスタート・ガイド
DEVKIT-MOTORGDは、互換性のあるベース・ボードと同様に、Arduino UNO互換です。内側の列はArduino標準に準拠し、外側の列は適切なNXP独自の機能ピンに対応しています。DEVKIT-MOTORGDを実際に使ってみましょう。以下の詳細な手順に従います。
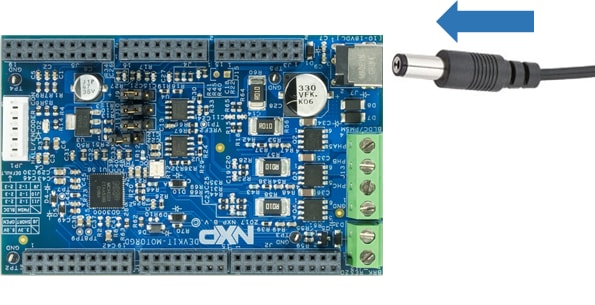
1.2 外部から電源を供給するようにベース・ボードを構成する
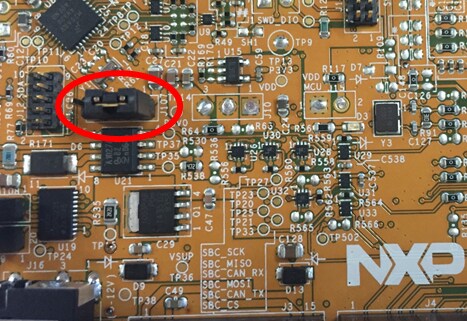
モーターの駆動には、USBが供給できる電圧よりも高い入力電圧が必要です。したがって、ベース・ボードは外部電源から電力を供給するように構成する必要があります。S32K144EVB-Q100では、次のようにJ107.1をJ107.2に接続します。
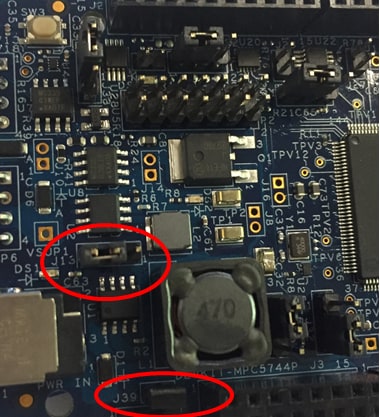
DEVKIT-MPC5744Pでも同じようにできます。J13.1をJ13.2に接続し、J39にジャンパを適用します。
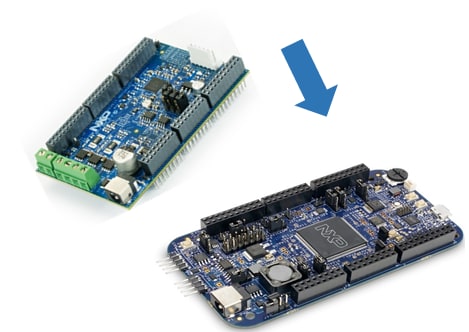
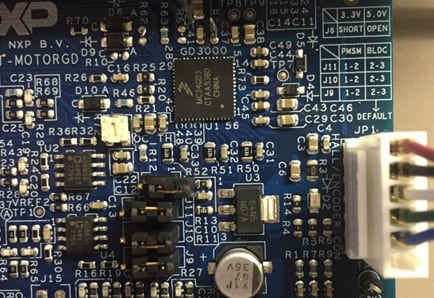
1.3 DEVKIT-MOTORGDを接続する
DEVKIT-MOTORGD Arduinoスタイルをベース・ボードに接続します。ピンが一致していることを確認してください。
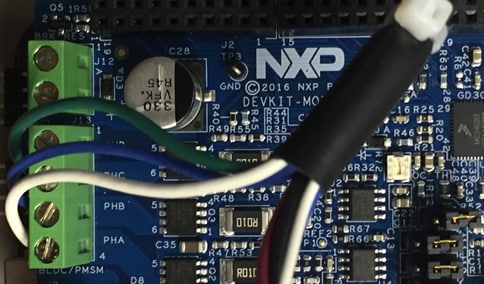
1.4 モーターを接続する
三相モーターをDEVKIT-MOTORGDのJ13に接続します。DEVKIT-MOTORGDは、BLDC(センサ付きおよびセンサレス)とPMSMをサポートしています。位相端子をアプリケーションに最適なモーターに接続します。NXPのサンプル・コードでは、Linix 45ZWN24-40 BLDCモーターを使用し、位相Aを白、位相Bを青、位相Cを緑に接続しています。
モーターにホール・エンコーダやポジション・センサがある場合は、次のようにJP1端子に接続します。
1.5 モーターを接続する(代替)
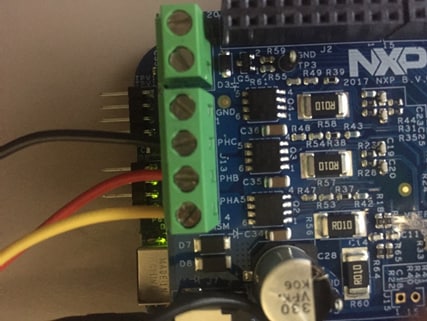
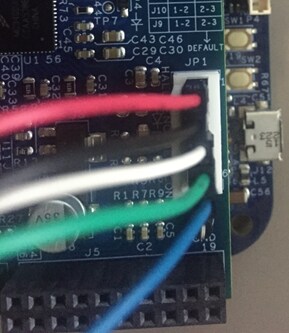
代替のモーターは、Nanotec DB41M024030-Aです。モーターには次のような配線が付属しています。
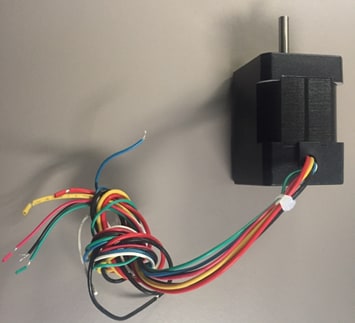
3本の太い配線は位相(赤、黄、黒)で、5本の細い配線はホール・センサ(赤、黒、白、緑、青)です。NXPのサンプル・コードを実行するには、位相Aを黄に、位相Bを赤に、位相Cを黒に接続します。
ホール・インターフェースの配線は、Linix 45ZWN24-40と同じ色分けに従っています。JP1というラベルから下に向かって、赤、黒、白、緑、青、配線なし(JP1.6は接続しないでください)の順に配線を接続します。
2. ソフトウェアの入手
2.1 設計をすぐに開始する
すばやく設計を開始するために、クイック・スタート・ガイドとサンプル・ソフトウェアをダウンロードします。
DEVKIT-MOTORGDクイック・スタート・ガイドを入手する
以下のソフトウェアは、評価目的でのみ使用できます。その目的は、DEVKIT-MOTORGDがどのように簡単なプロトタイピングをサポートしているかを示すことです。このスタート・ガイド・ページで説明するセットアップ手順では、DEVKIT-MOTORGDを使用するすべてのプロジェクトで実行する必要がある一般的な手順について説明します。以下のボタンをクリックすると、NXPのサンプル・ソフトウェアの完全なセットアップ手順にアクセスできます。
2.2 ツールチェーンをインストールする
NXPでは、S32 Design Studio (S32DS) というツールチェーンを無償で提供しています。S32 Design StudioはEclipseベースのIDEで、包括的なソフトウェア書き込みとデバッグ機能を提供します。GDBやLauterbachなど、複数のデバッガをサポートしています。
NXPでは、コードを生成する前にアプリケーションをグラフィカルに構築できるSimulinkベースのツールであるモデルベース設計ツールボックスも提供しています。
各プラットフォームでのツールボックスの機能の詳細については、以下のボタンをクリックしてください。
S32K MBDTに関する情報を入手する MPC5744P MBDTに関する情報を入手する
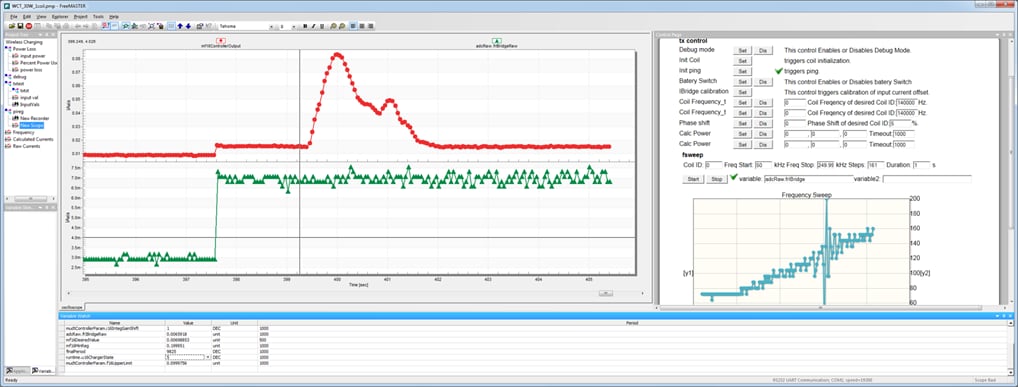
2.3 FreeMASTERのダウンロード
FreeMASTERは、NXPの無料のデバッグ・モニタです。動作中のシステム変数の非侵入型のモニタリングをサポートします。時間に応じて変化するさまざまな変数をオシロスコープのように表示することや、データをテキスト形式で表示することが可能です。
3. ベース・ボードをプログラムする
簡単なサンプル・コードを実行し、S32 Design Studio IDE for Power Architectureで新しいプロジェクトを作成したり、独自のコードを作成したりする方法を確認します。
3.1 もっとトレーニングを受ける
S32K144EVB-Q100とDEVKIT-MPC5744PはどちらもOpenSDAをサポートしています。USBで接続します。S32 Design Studioまたは任意のデバッグ・インターフェースを使用して、モータ制御プログラムを作成します。
S32K144EVB-Q100 DEVKIT-MPC5744P
3.2 実行する
セットアップの電源を入れ直し、モーターの回転を確認します。
前の手順の補足チュートリアルに従ってNXPのサンプル・ソフトウェアをインストールした場合、次のように制御します。
SW1を押して速度を上げるSW2を押して減速する/逆回転する

3.3 FreeMASTERで制御する
NXPソフトウェアに付属しているFreeMASTERプロジェクトを開きます。FreeMASTERへのボード接続をセットアップし、実行します。
Tera Termチュートリアル
Tera Termチュートリアル
Tera Termは、広く利用されているオープン・ソースのターミナル・エミュレーション・アプリケーションです。このプログラムを使用して、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示できます。
- SourceForgeからTera Termをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します
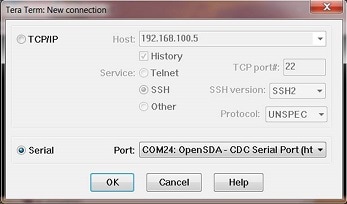
- Tera Termを起動します。初めて起動する際には、次のダイアログが表示されます。[Serial(シリアル)]オプションを選択します。ボードが接続されている場合は、COMポートが自動的にリスト内に表示されます
- 事前に確認したCOMポート番号を使用して、シリアル・ポートをボーレート19,200、8データ・ビット、パリティなし、1ストップ・ビットに設定します。この設定は[Setup(セットアップ)]→[Serial Port(シリアル・ポート)]から行うことができます
- 接続が確立されているか検証します。確立されている場合、Tera Termのタイトル・バーに次のように表示されます
- 以上で設定は完了です
PuTTYチュートリアル
PuTTYチュートリアル
PuTTYは、広く利用されているターミナル・エミュレーション・アプリケーションです。このプログラムを使用して、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示できます。
- 下のボタンをクリックしてPuTTYをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します
- 選択したダウンロードのタイプに応じて、ダウンロードした*.exeファイルをダブルクリックするか、[Start(スタート)]メニューから選択して、PuTTYを起動します
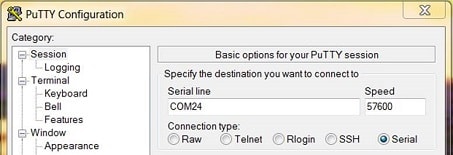
- 表示されたウィンドウで設定を行い、[Serial(シリアル)]ラジオ・ボタンを選択して、事前に確認したCOMポート番号を入力します。ボーレートもあわせて指定します。今回は19,200を入力します
- [Open(開く)]をクリックして、シリアル接続を確立します。ボードが接続されていて、正しいCOMポートが入力されていれば、ターミナル・ウィンドウが開きます。設定が正しくない場合は、アラートが表示されます
- 以上で設定は完了です
設計・リソース
サポート
トレーニング
DEVKIT-MOTORGDをS32K144EVB-Q100およびDEVKIT-MPC5744Pとともに使用する方法については、これらのビデオ・チュートリアルを視聴してください。