SiC EVパワー・インバーター制御リファレンス・プラットフォームのスタート・ガイド
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。

お客様の EVパワー・インバーター制御リファレンス・プラットフォームGen 2
1. 使用を開始する
NXPのアナログ製品開発ボードは、NXP製品の評価を目的とした使いやすいプラットフォームです。さまざまなアナログ・ソリューション、ミックスド・シグナル・ソリューション、パワー・ソリューションに対応しています。実績のある大容量テクノロジを使用したモノリシック集積回路およびシステム・イン・パッケージ (SiP) デバイスを搭載しています。NXP製品は、最先端システムへの電源供給において、より長いバッテリー寿命、より小さいフォーム・ファクタ、より少ない部品数、より低いコスト、改善されたパフォーマンスを実現します。
このページでは、EVINVERTERHDリファレンス・プラットフォームをセットアップして使用する手順について説明します。
1.1 キットの内容と同梱物一覧
EV-INVERTERHDキットには以下のものが含まれています。
- ドライバ制御ボード (EV-POWEREVBHD)
- MCU制御ボード (EV-CONTROLEVMHD)
- クイック・スタート・ガイド
1.2 追加ハードウェア
EV-INVERTERHD SiC MOSFETイネーブルメント・キットを使用するには、キットに含まれているもの以外のハードウェアもご用意いただく必要があります。必要になる追加ハードウェアの数は、お客様がVepco PIMを使用しているか、または独自のEVインバーター・プラットフォームを設計しているかによって異なります。
すべてのお客様(Vepco PIMのユーザーを含む)に以下のものをご用意いただく必要があります。
- 低電圧DC電源:インバーター用12 VDC電源
- 高電圧DC電源:モーター用、最大500 VDC、400 A(または同程度)
- Kvaser Leaf Light HS v2 USB-CANインターフェース、または同等のUSB-CANインターフェース・アダプタ(こちら から入手可能です)
- PEmicro Multilinkデバッグ・プローブ:EV–CONTROLEVMHボードをPCベースのGUIに接続するために使用(こちら から入手可能です)
- モーター:3相永久磁石同期モーター
- 高電圧ケーブル(2線):高電圧DC電源からPIMへの高電圧接続用
- 高電圧ケーブル(3線):PIMからモーターへの高電圧接続用
- 低電圧ケーブル: 12 VDC電源からPIMへの低電圧接続用
独自のインバーター・プラットフォームの設計を選択されたお客様は、上述した必要な機器に加えて、以下の機器もご用意いただく必要があります。
- Wolfspeed SiC MOSFETダイを使用したStarpower SiC P6モジュール、またはHybridPACKモジュールに含まれる他のSiC MOSFETあるいはIGBT(NXP EV-INVERTERHDイネーブルメント・キットを正規にご購入されたお客様のみがStar Power Europe AGからご購入いただけます)
- SiCまたはIGBT HybridPACKフットプリント・モジュールに適合する冷却プレートまたはウォーター・ジャケット:冷却プレートは、SiCまたはIGBTモジュールの冷却構造インターフェースとして機能します。また、パワー・インバーター・モジュール (PIM) の電子機器およびアクセサリ部品を機械的にサポートします
- バス・バー:DCリンク・キャパシタをP6モジュールに接続するため、およびDC高電圧/大電流電源へのリンクを提供するために使用されます
- DCリンク・キャパシタ:並列接続された4個のKemet C4AQIEW6100A3BJ 100 uF 800 VDC RADキャパシタ(こちら から入手可能です)をインバーターのベースライン性能測定に使用します。選択するキャパシタは、上記のSiC MOSFETおよびその想定動作電圧に対応している必要があります
- 23ポジション信号コネクタ(オプション):PIMを三相モーターに接続するためのAmpsealコネクタ (PN 770680-1)(こちら から入手可能です)
- 高電圧シールド・ケーブル(2線):23ポジション信号コネクタをモーターのレゾルバ接続の励起信号に接続するために使用
- 低電圧シールド・ケーブル(21線):23ポジション信号コネクタをモーターのレゾルバの検出信号やCAN信号などに接続するために使用
- 40ピン・ケーブル:EVCONTROLEVMHD MCU制御ボードをEV-POWEREVBHDドライバ制御ボードに接続するための2個のオス・コネクタ付き40ピン・フラット・リボンケーブル
- ボード・スタンドオフ:コンポーネントの機械的支持を提供
1.3 Windows PCワークステーション
このリファレンス・プラットフォームには、Windows PCワークステーションが必要です。このリファレンス・プラットフォームで作業する際は、これらの最低限の仕様を満たすことで良好な結果が得られます。
- 利用可能な2個のUSBポートを備えたWindows 10、8、または7対応のPC
1.4 ソフトウェア
以下に記載したソフトウェアは、このリファレンス・デザインで作業をする前にインストールしておく必要があります。記載されているすべてのソフトウェアは、NXPの保護されたウェブサイトから入手可能です。保護されたサイトにアクセスするには、ハードウェアの出荷時に同梱されている登録コードを使用してください。ソフトウェア・バンドルには、EV-INVERTERHD SiC MOSFETイネーブルメント・キットで動作する実際のアプリケーション・ソフトウェアが含まれています。EV-INVERTERHDイネーブルメント・キットをご購入されたお客様には、ソフトウェアのダウンロード方法に関する説明書が提供されます。
- S32 Design Studio IDE V2.1 for Power Architecture
- 車載用演算/モータ制御ライブラリ (AMMCLib)
- FreeMASTER 3.0ランタイム・デバッグ・ツール
- モータ制御アプリケーション・チューニング (MCAT)
- サンプル・コード、GD3160デバイス・ドライバ・ノートおよびGD3160デバイス・ドライバ・リファレンス・ノート
2. ハードウェアの入手
2.1 ボードの特長
利点:
- 開発を迅速化
- 完全なプラットフォーム・ソリューション
- 機能安全オプションの提供
- 性能を最適化
搭載されている主な製品:
- GD3160 絶縁型SiC MOSFETまたはIGBT ASIL Dゲート・ドライバ
- MPC5775E 高度なモータ制御ASIL D MCU
- FS65XX 堅牢なASIL D SBC
- TJA1051 冗長CANバス・インターフェース
- TJA1100、IEEE 100BASE-T1準拠、車載用イーサネットPHYトランシーバ・インターフェース
- 三相の評価のためにStarpower P6または同等のHyperPACKフットプリント・モジュールに接続可能
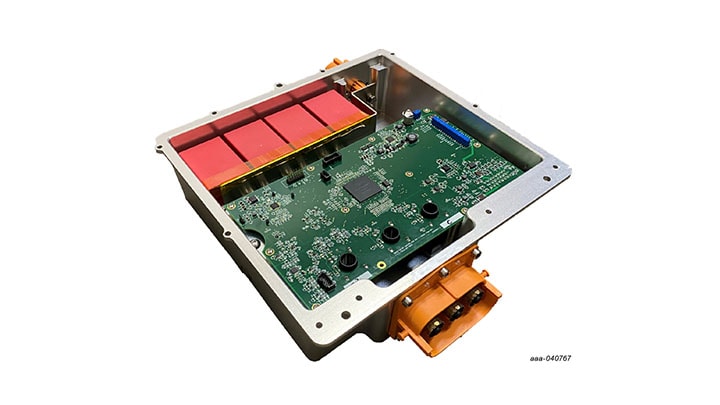
2.2 ボードの説明
EV-INVERTERHD SiC MOSFETは、EV三相トラクション・モーター・インバーターを開発するための内容が含まれたNXPのリファレンス・デザイン・イネーブルメント・キットです。このシステムは、Wolfspeed SiC MOSFETダイ(または同等のHybridPACKフットプリント)を使用してStarpower P6フットプリント・モジュールを駆動するように設計されています。このキットには、2つのPCBと基本構成/ドライブ・ソフトウェアが含まれています。PCBボードのレイアウト、回路図、およびガーバー・ファイルは、NXPの保護されたウェブサイトから入手できます。保護されたサイトにアクセスするには、ハードウェアの出荷時に同梱されている登録コードを使用してください。
お客様には、追加のインバーター・コンポーネントを入手していただく必要があります。これらのコンポーネントには、SiC MOSFETまたはIGBTモジュール、リンク・キャパシタ、バス・バー、冷却プレート、取り付け金具などが含まれます。NXPのEV-CONTROLEVMHDボードおよびEVPOWEREVBHDボードで作業するために完全なPIMを設計して組み立てる場合には、独自のコンポーネントを選択できます。別の選択肢として、組み立て済みのリファレンスPIMプラットフォーム一式をNXPのパートナーであるVepco Technologiesからご購入いただくこともできます。Wolfspeedダイを使用したSiC MOSFETモジュールは、Starpower Semiconductor LTD.からご購入いただけます。
2.3 ボードのコンポーネント
EV-INVERTERHD SiC MOSFETイネーブルメント・キットの概要。
3. ハードウェアの構成
EV-INVERTERHD SiC MOSFETイネーブルメント・キットを使用したインバーター・プラットフォームの組み立て手順は、Vepco PIMが使用されているか、またはユーザーが独自のインバーター制御プラットフォームを設計することを選択したかによって異なります。以降のセクションでは、両方の手順について取り上げています。
3.1 ハードウェアの組み立て(Vepcoでの手順)
このセクションの組み立て手順は、Vepco PIMを使用することを選択したユーザーに適用されます。
この手順には、以下のハードウェアが必要です。
- Vepcoパワー・インバーター・モジュール (PIM)
- インバーターの電源供給用の高電圧ケーブル(2線)
- モーターの接続用の高電圧ケーブル(3線)
- 12 V電源(インバーター)
- 高電圧電源(モーター)
- モーター
- PEmicro Multilinkデバッガ・プローブ
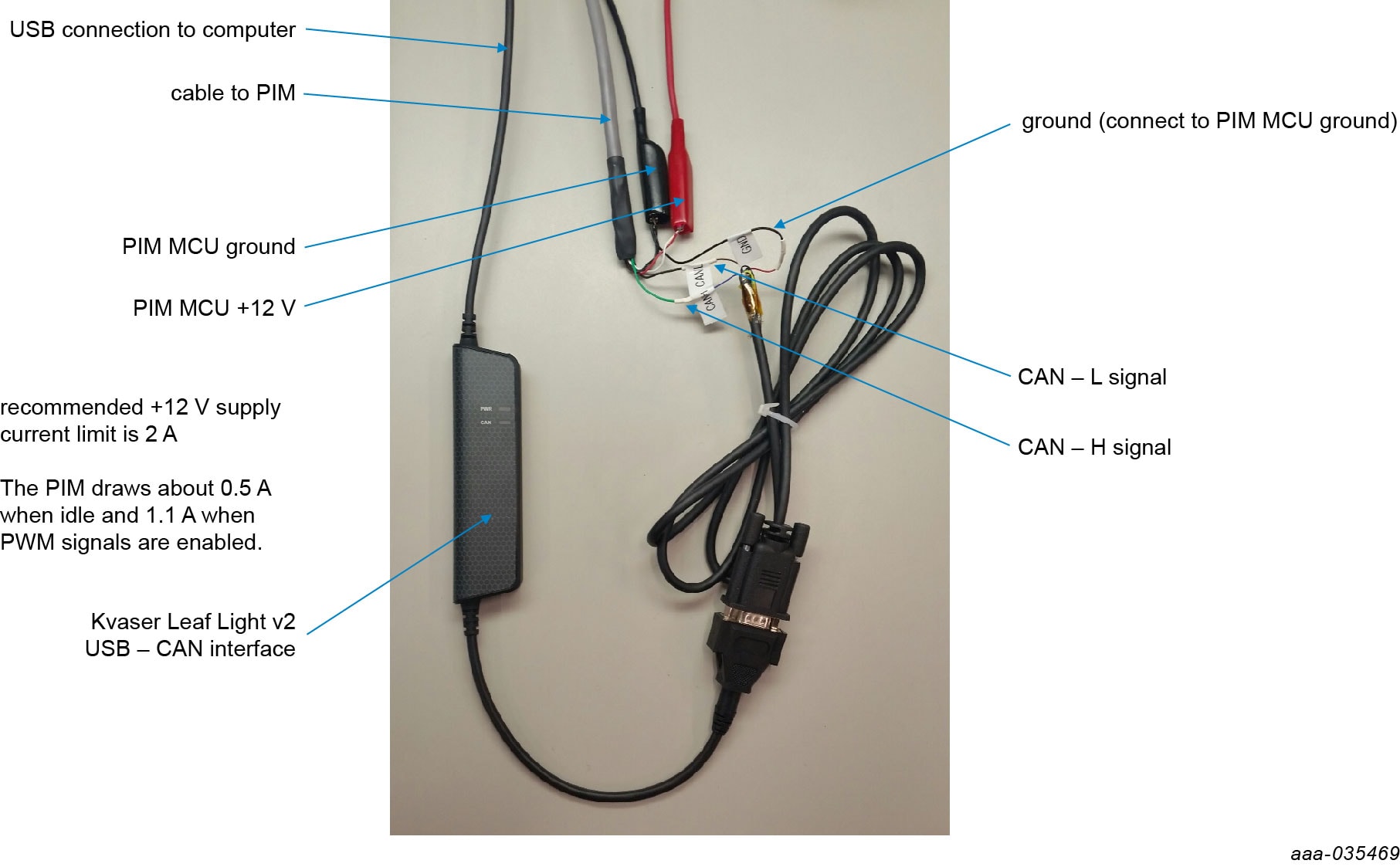
- Kvaser Leaf Light v2 USB-CANインターフェース・アダプタ
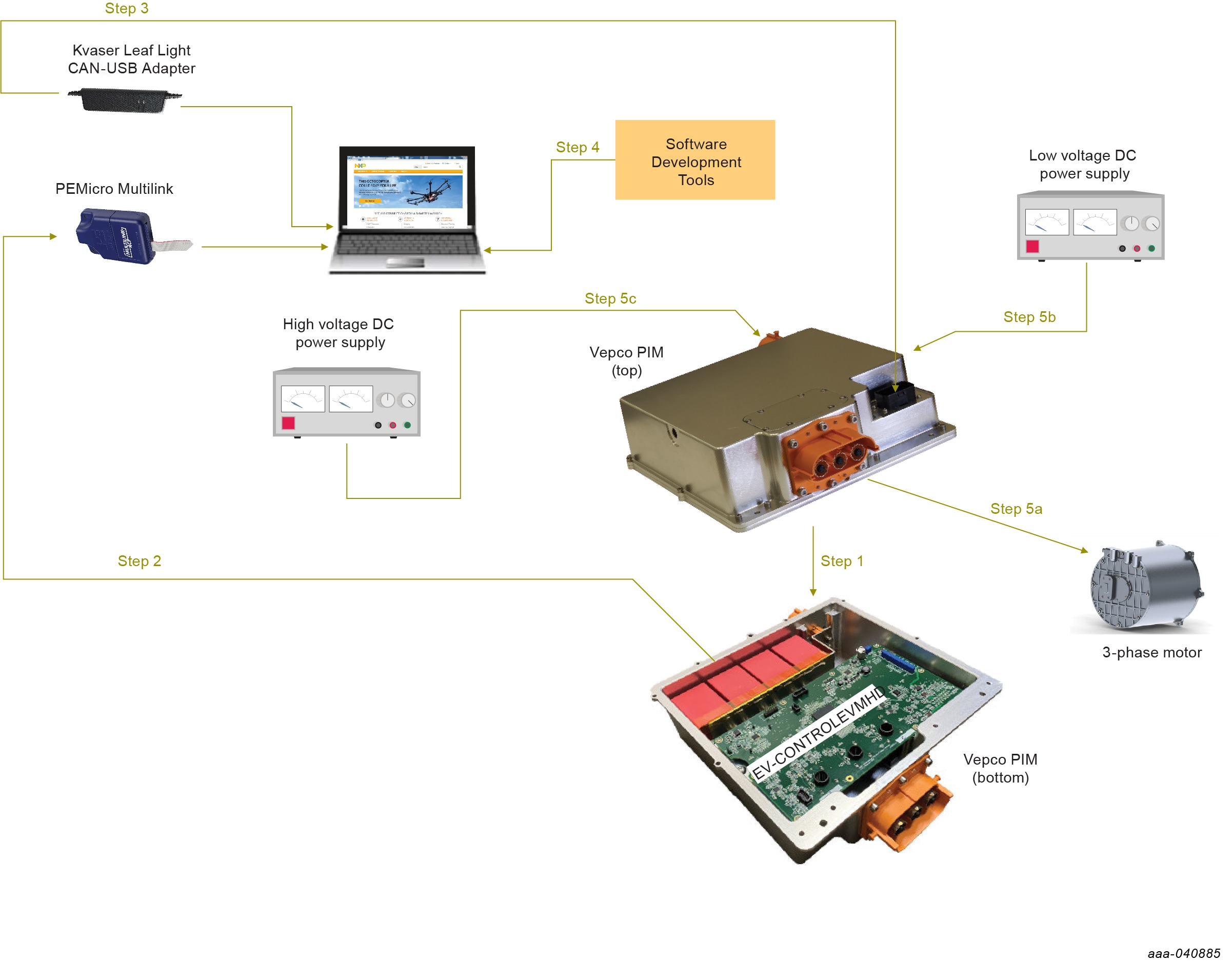
- Vepco PIMを裏返し、底面のプレートを取り外します。これにより、ユニット内に搭載されているEV- CONTROLEVMHDボードが露出します。
- ピン1のマークの位置を合わせて、14ピンPEmicro Multilinkデバッガ・ヘッダをEVCONTROLEVMのコネクタP1に接続します。PEmicro MultilinkからホストPCにUSBケーブルを接続します。PEmicro Multilinkの両方のLEDライトが点灯し、CANバスが通電中で通信可能であることを示します。PEmicroソフトウェアのインストールおよびPEmicroプローブを使用したデバッグに関する情報については、PEmicroのマニュアルを参照してください。
- Kvaser Leaf Light USB-CANインターフェース・アダプタを、EV-CONTROLEVMHDボードの底部にある23ピン・コネクタからWindows PCのUSBポートに接続します。
- ソフトウェア開発ツールをインストールします。
- Vepco PIMのドキュメントに記載されている手順に従って、以下の接続を行います。
- 三相モーター
- 低電圧DC電源
- 高電圧DC電源。警告:高いDC電圧に触れると死に至る危険性があります。細心の注意を払って使用してください
感電および火災の危険
この製品では高電圧部品が絶縁されていないため、動作中には感電、けが、死亡、火災の危険が伴います。この製品は評価のみを目的として設計されています。絶縁されていない主電圧回路と高電圧回路を扱う際には、有資格者が現地の要件および労働基準法に則して、指定のテストエリア内で作業を行うようにしてください。本製品の動作中には、決して目を離さないようにしてください。
3.2 ハードウェアの組み立て(Vepco以外での手順)
以下の組み立て手順は、Vepcoモジュールを使用する代わりに独自のインバーター制御プラットフォームを設計することを選択したユーザーに適用されます。この手順では、電気的な接続のみを取り上げています。独自のプラットフォーム内のコンポーネントを支持および接続するために必要な物理的構造(バス・バー、取り付けハードウェアなど)は、お客様ご自身で組み立てていただく必要があります。
- EV-INVERTERHD SiC MOSFETイネーブルメント・キット
- Starpower P6モジュールまたは同等のHybridPACKモジュール
- 冷却プレート
- HybridPACKモジュールに対応するバス・バー
- DCリンク・キャパシタ
- インバーターの電源供給用の高電圧ケーブル(2線)
- モーターの接続用の高電圧ケーブル(3線)
- モーターのレゾルバ接続用の高電圧シールド・ケーブル(2線)
- モーターのレゾルバ接続用の低電圧シールド・ケーブル(21線)
- 23ポジションAmpseal信号コネクタ(オプション)
- 12 V電源(インバーター)
- 高電圧電源(モーター)
- オス/メス・コネクタ付き40ピン・フラット・リボンケーブル(オプション)
- ボード・スタンドオフ - 0.5インチ(オプション)
- モーター
- PEmicro Multilinkデバッガ・プローブ
- Kvaser Leaf Light v2 USB-CANインターフェース・アダプタ
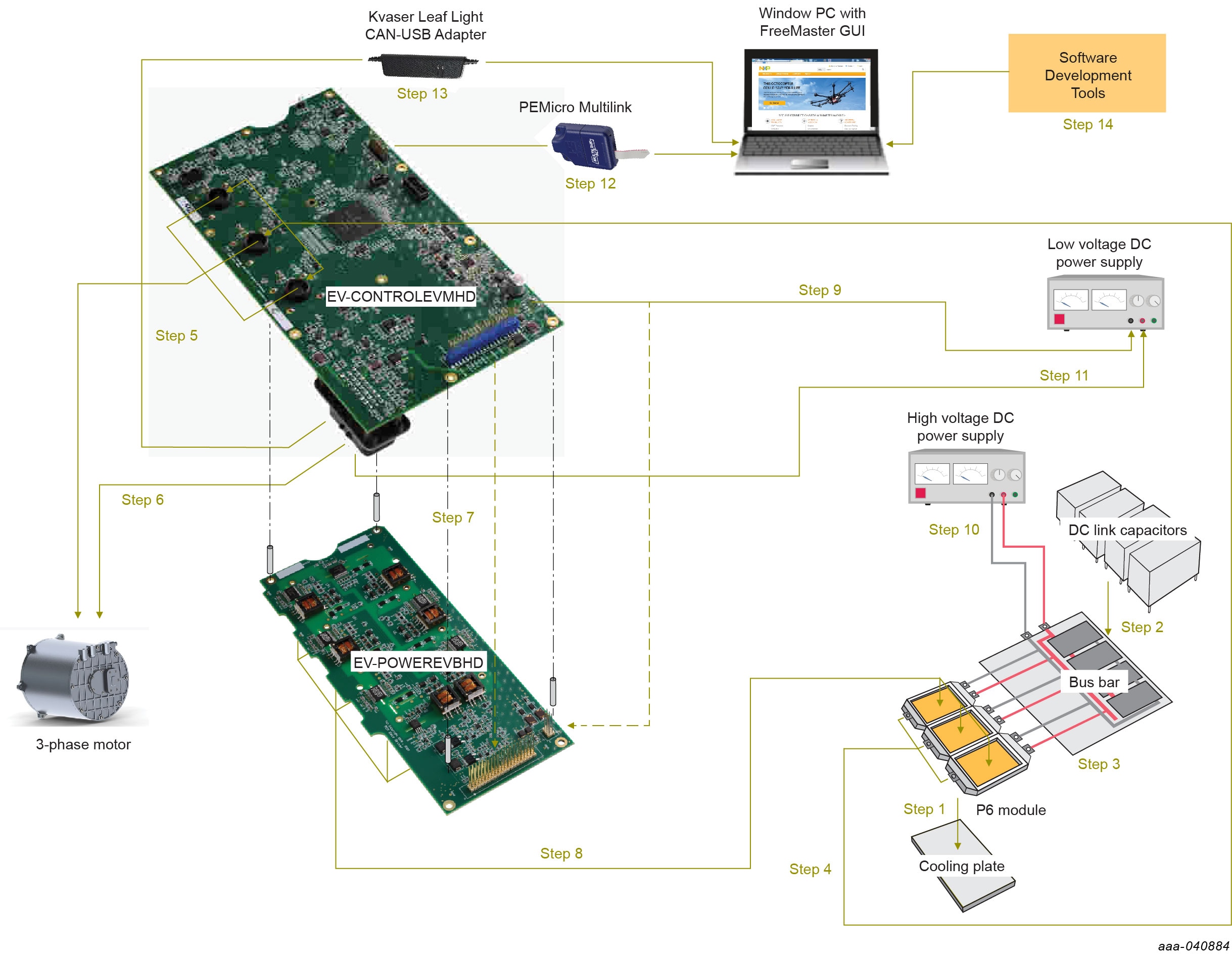
- P6モジュールを冷却プレートに取り付けます。
- DCリンク・キャパシタのタブをバス・バーに取り付けます
- P6モジュール上の3つのプラス側電源コネクタをバス・バー上の対応するコネクタに接続します。P6モジュール上の3つのマイナス側電源コネクタをバス・バー上の対応するコネクタに接続します。
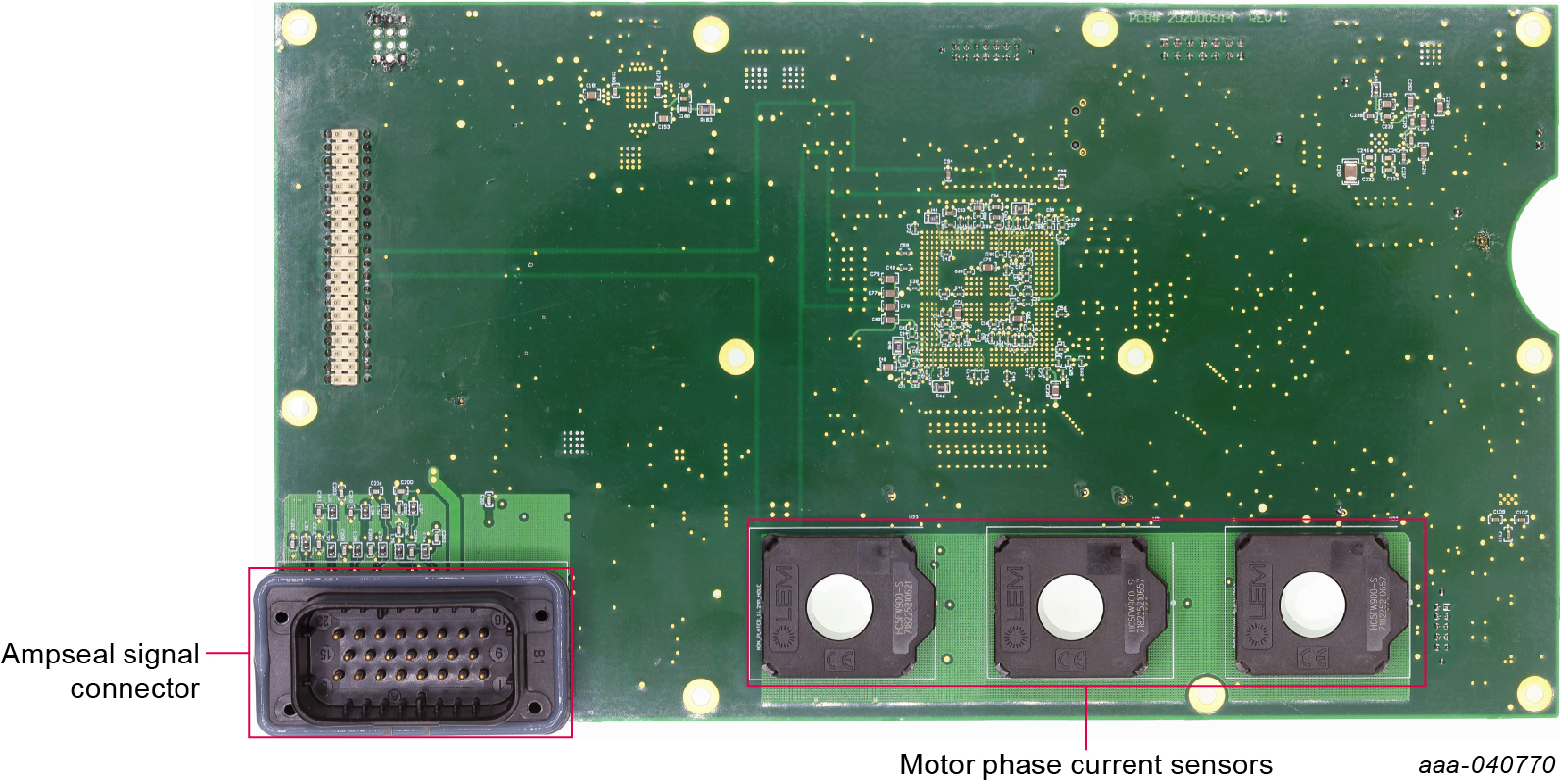
- P6モジュールの反対側にある3つの出力コネクタから、EV-CONTROLEVMHDボード上の3つのモーター位相電流センサ(U21、U22、U23)にケーブルを配線します。
- 前のステップで電流センサに配線した3本のケーブルに三相モーターを接続します。U、V、Wの接続が一致していることを確認します。
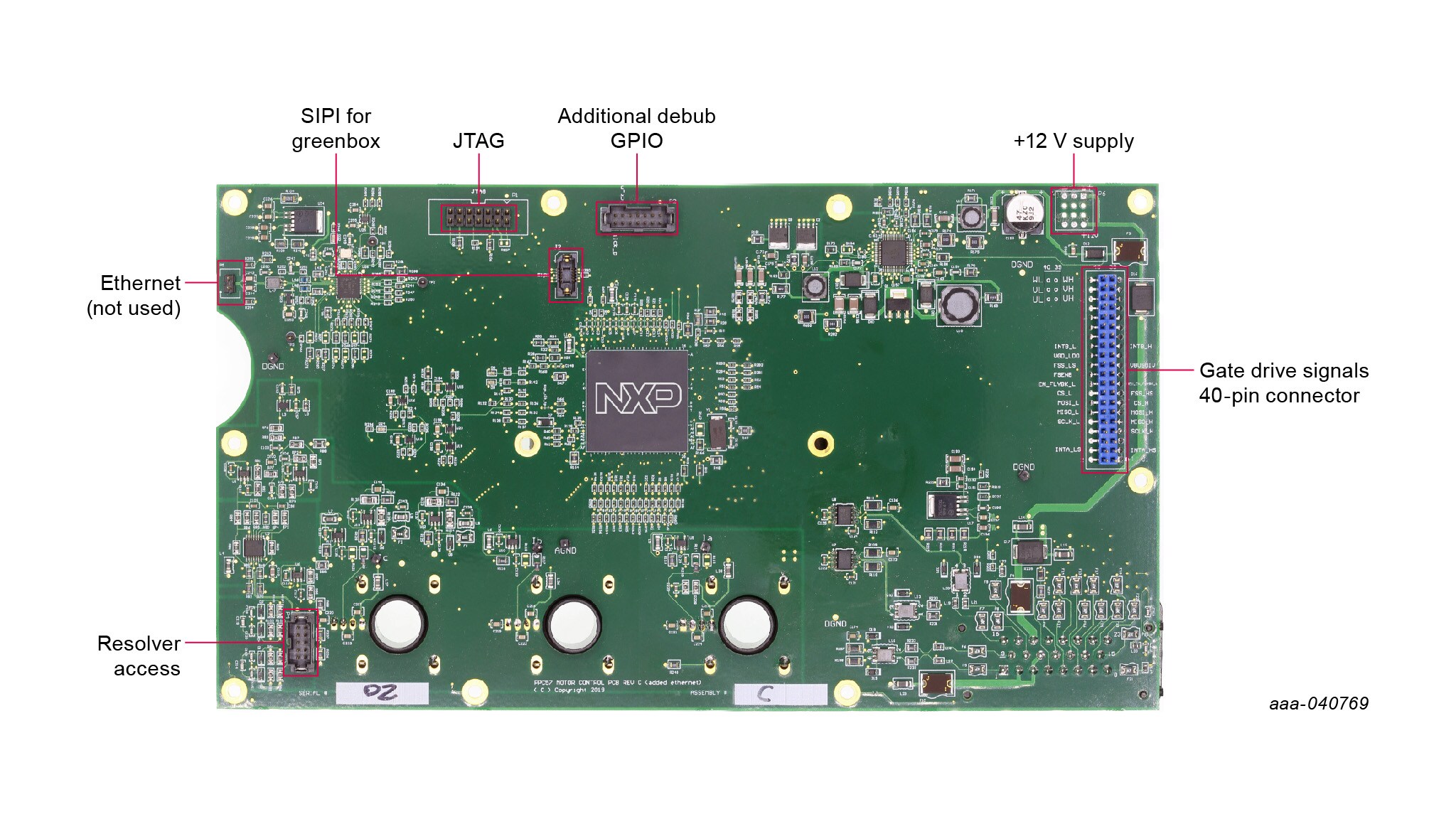
- EV-CONTROLEVMHDボードの23ピン・コネクタにモーターのレゾルバを接続します。以下のように接続します。
- 2線式高電力シールド・ケーブルを使用して、23ピン・コネクタのピン14とピン21(レゾルバ励磁信号)をモーター上の対応する接続部に接続します。シールド・グランドを23ピン・コネクタのピン6に接続します
- 低電力ケーブルを使用して、23ピン・コネクタのピン8、15、22、23(レゾルバの検出信号)をモーター上の対応する接続部に接続します。シールド・グランドを23ピン・コネクタのピン7に接続します
- 低電力ケーブルを使用して、残りのすべての接続(CANH、CANLなど)を行います
- イネーブルメント・キットの2つのボードを接続します。接続は、以下の2つの方法で行うことができます。
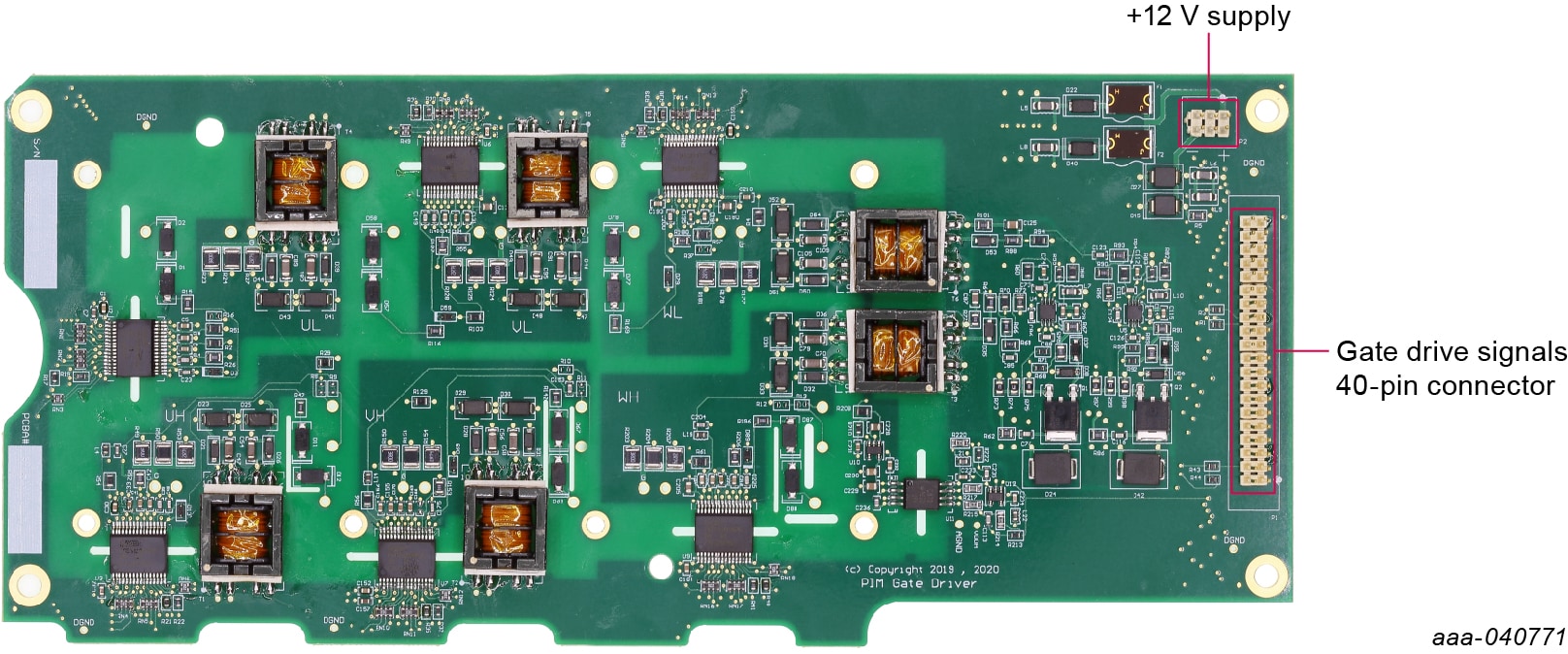
- 方法A:40ピン・コネクタ(J1とP1)および+12電源コネクタ(P6とP2)を直接接続することで、EV-CONTROLEVMHDボードをEV- POWEREVBHDボードの上に取り付けます。下側のボードのピンが上側のボードのコネクタに挿入されていることを確認します。スタンドオフを使用して、2つのボード間に構造的支持を設けます。この方法でボードを接続した場合、EV- POWEREVBHDボードの上部にあるテスト・ポイントとコンポーネントへのアクセスが妨げられる点に注意してください
- 方法B:2つのボードをケーブルで接続します。そのためには、EV-CONTROLEVMHDボードのコネクタJ1とEV-POWEREVBHDボードのコネクタP1間に40ピン・リボン・ケーブルを接続します。この構成では、EV-POWEREVBHDボードへはEV-CONTROLEVMHDボードとは別個に給電する必要があります(ステップ7を参照してください)
- EV-POWEREVBHDボードをP6モジュールに接続します。P6モジュールの上面のピンとEV-POWEREVBHDボードの底部のP6モジュール・コネクタの位置を合わせて、2つのユニットを装着してください。あるいは、PCモジュール上の各ピンをEV-POWEREVBHDボード上の対応するコネクタに配線することもできます。
- 低電圧DC電源 (12 V) をEV- CONTROLEVMHDボードのコネクタP6に接続します。ステップ6の方法Bを使用してEV- CONTROLEVMHDボードをEV-POWEREVBHDボードに接続した場合は、低電圧DC電源からEV-POWEREVBHDボードの+12電源コネクタ (P2) への接続が追加で必要になります。ステップ6の方法Aのように2つのボードを取り付けた場合、EV-POWEREVBHDへはEV-CONTROLEVMHDボードの+12電源コネクタを介して直接電力が供給されます。
- 2線式高電圧ケーブルを使用して、高電圧/大電流DC電源のプラス側コネクタをバス・バーのプラス側のDCリンク・キャパシタ・コネクタに接続します。次に、高電圧/大電流DC電源のマイナス側コネクタをバス・バーのマイナス側のDCリンク・キャパシタ・コネクタに接続します。警告:高いDC電圧に触れると死に至る危険性があります。細心の注意を払って使用してください。DC接続に高電圧 (>300 V) を印加する前に、電流制限 (1.0 A) 電源を使用してDCに15~30 Vを印加し、過度のリーク電流がないことを確認してください。
感電および火災の危険
この製品では高電圧部品が絶縁されていないため、動作中には感電、けが、死亡、火災の危険が伴います。この製品は評価のみを目的として設計されています。絶縁されていない主電圧回路と高電圧回路を扱う際には、有資格者が現地の要件および労働基準法に則して、指定のテストエリア内で作業を行うようにしてください。本製品の動作中には、決して目を離さないようにしてください。
- ピン1のマークの位置を合わせて、14ピンPEmicro Multilinkデバッガ・ヘッダをEV- CONTROLEVMのコネクタP4に接続します。PEmicro MultilinkからホストPCにUSBケーブルを接続します。PEmicro Multilinkの両方のLEDライトが点灯し、JTAGバスが通電中で通信可能であることを示します。PEmicroソフトウェアのインストールおよびPEmicroプローブを使用したデバッグに関する情報については、PEmicroのマニュアルを参照してください。
- Kvaser Leaf Light USB-CANインターフェース・アダプタを、EV-CONTROLEVMHDボードの底部にある23ピン・コネクタからWindows PCのUSBポートに接続します。
- ソフトウェア開発ツールをインストールします。
4. ソフトウェア・ツールのインストール
S32 Design Studio IDEは、車載用マイクロコントローラおよび超高信頼性マイクロコントローラ向けに無償提供される統合開発環境で、目的とするソフトウェア設計の編集、コンパイル、およびデバッグを行うことができます。
- S32DS-PAにアクセスし、[User Guide(ユーザー・ガイド)]をクリックします。
- S32 Design Studio for Power Architecture 2.1のインストール・ガイドの手順に従います。
- S32 Design Studio for Power Architecture V2.1のアイコンをクリックして、S32 Design Studioを実行します。
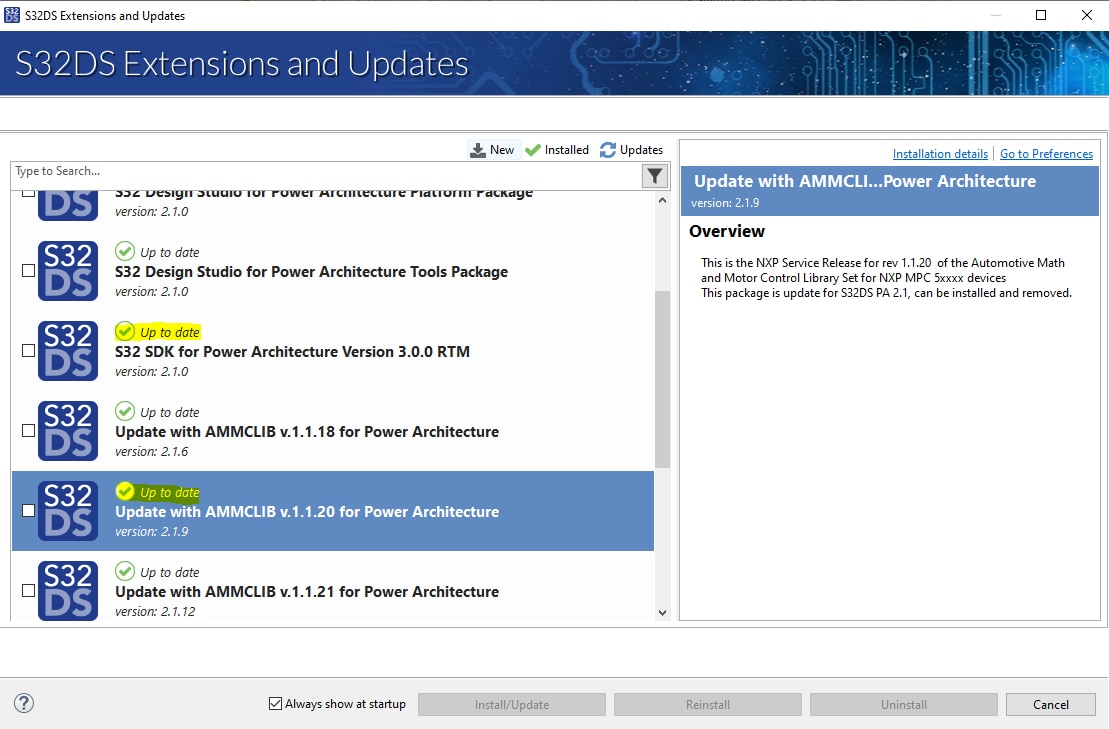
- デバイスをフラッシュする前に、S32 Design Studio for S32_SDK_S32PA_RTM_3.0.0およびAMMCLIB_1.1.20の更新がインストールされていることを確認します。そのためには、[Help(ヘルプ)]に進み、[S32DS Extensions and Updates(S32DSの拡張と更新)]を確認してください。最新版のS32 SDK for Power Architectureバージョン3.0.0 RTMおよびAMMCLIB v.1.1.20 for Power Architectureに更新される必要があります。
- [Run(実行)]>[Flash from file...(ファイルからフラッシュ)]の順にクリックします。
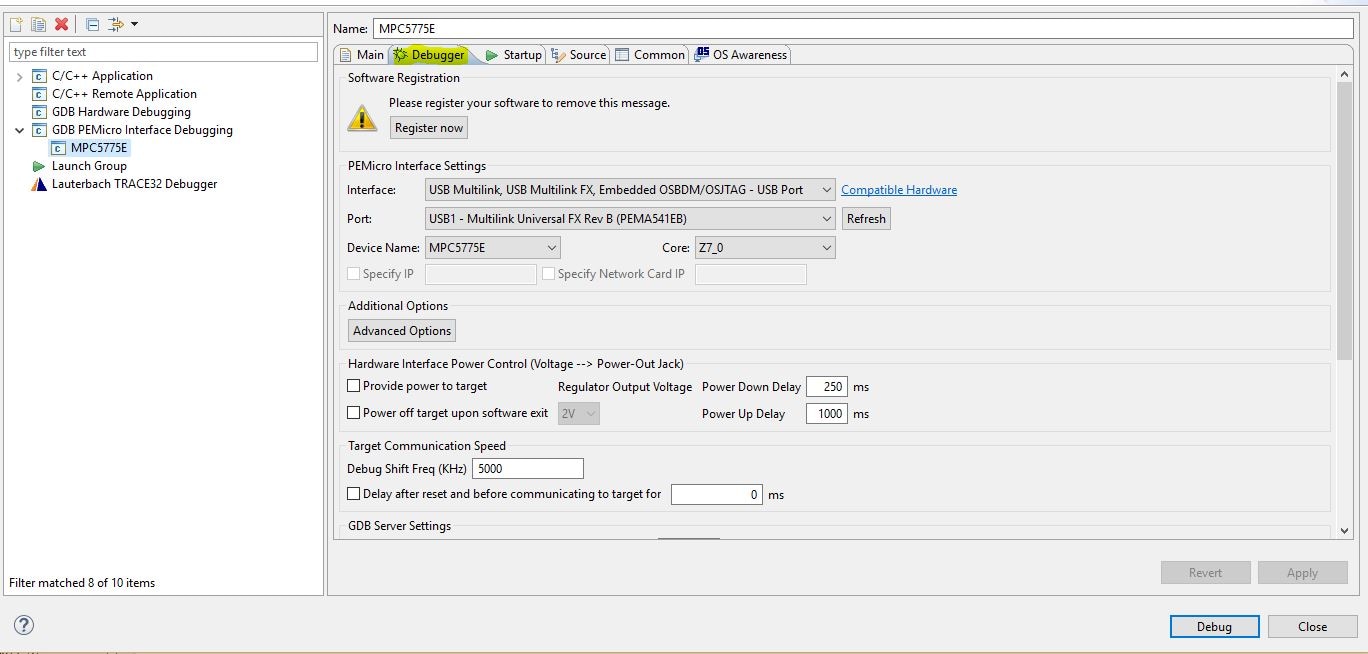
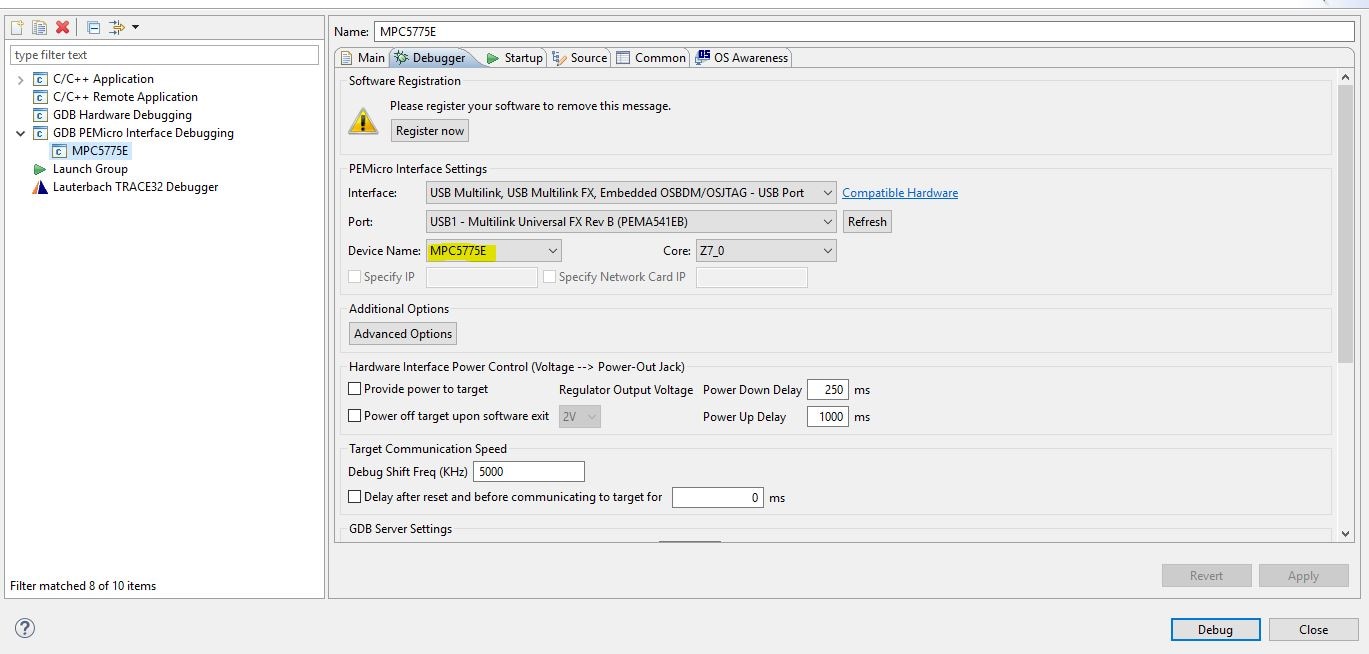
- [GDB PEmicro Interface Debugging(GDB PEmicroインターフェースのデバッグ)]アイコンをダブルクリックします。
- 新しい構成の名前をMPC5775Eに変更します。
- [Debugger(デバッガ)]タブをクリックします。
- [Device Name(デバイス名)]のドロップダウン・メニューをクリックし、MPC5775Eを選択します。
- [Apply(適用)]をクリックします。
- .elfファイルをフラッシュします。

4.1 USB-CANインターフェース・アダプタの取り付け
- Kvaserのダウンロード・ページにアクセスします。
- Windows用の最新のKvaserドライバをダウンロードし、インストールします。ドライバのページを以下に示します。
- USB-CANインターフェース・アダプタをコンピュータのUSBポートに接続します。
- Kvaserのダウンロード・ページにアクセスします。
- Windows用の最新のKvaserドライバをダウンロードし、インストールします。ドライバのページを以下に示します。
- USB-CANインターフェース・アダプタをコンピュータのUSBポートに接続します。
4.2 Kvaser Leaf Light v2 9ピン・コネクタのピン配置
Windows 10の場合は、ストレージ・サービスを無効にします。それには、services.mscを実行し、リストにあるストレージ・サービスをダブルクリックして、[Stop(停止)]ボタンを押してください。

| ピン | 説明 |
|---|---|
| 1 | 未接続 |
| 2 | CAN_L |
| 3 | GND |
| 4 | 未接続 |
| 5 | シールド |
| 6 | 未接続 |
| 7 | CAN_H |
| 8 | 未接続 |
| 9 | 未接続 |
4.3 FreeMASTERのセットアップ
PIMへの接続、およびFreeMASTERツールを使用したインバーター・アプリケーション・デモの監視と制御に関する情報については、UM11551 PIM FreeMASTER GUIユーザー・マニュアルを参照してください(キットをご購入されたお客様のみがこちらからご利用いただけます)。
設計・リソース
ボードに関するドキュメント
- UM11550、EV-INVERTERHD SiC MOSFETイネーブルメント・キット・ユーザー・マニュアル
- AN13091、EVトラクション・モーター・パワー・インバーター制御リファレンス・プラットフォームのアプリケーション・ノート
- GD31xxデバイス・ドライバ・サンプル・コード
ソフトウェア
サポート
フォーラム
NXPのいずれかのコミュニティ・サイトで、他のエンジニアとつながり、RDDRONE-T1ADAPT評価ボードを使用した設計に関する専門的なアドバイスを受けることができます。